具备应急力矩控制模式的主动侧杆操纵装置及方法与流程
本发明涉及驾驶舱集成,特别涉及一种具备应急力矩控制模式的主动侧杆操纵装置及方法。
背景技术:
1、电传操纵飞行控制系统的发展,使得侧杆替代中央杆成为了主流趋势。民用飞机采用的侧杆大多为被动侧杆,即飞行员不能直接通过握杆感受到反馈的杆力和位移量的侧杆。而湾流g500/g600、mc-21等商用客机已经采用了主动侧杆,即飞行员可以通过侧杆直接感知舵面气动载荷,并实现自动驾驶状态下随动,左右侧杆联动的功能。
2、大多数民航飞行员更加愿意采用被动侧杆,但传统被动侧杆采用弹性阻力元件提供阻尼和回中特性,不具备调节能力,飞行员只能去适应飞机。而主动侧杆传动机构复杂,电机伺服加载方式容易造成电机卡阻或传动机构卡阻,导致操作者丧失对飞行器的控制能力,进而发生不安全事故。
3、现有的主动侧杆传动方式,缺少应急状态下的备份控制能力。
技术实现思路
1、本发明的目的就是克服现有技术的不足,提供了一种具备应急力矩控制模式的主动侧杆操纵装置及方法,具备主动侧杆模式和应急力矩控制模式,可满足飞机在不同状态下的控制要求,避免因为卡阻和失效导致的飞行器失控,提升飞行安全。
2、本发明采用如下技术方案:
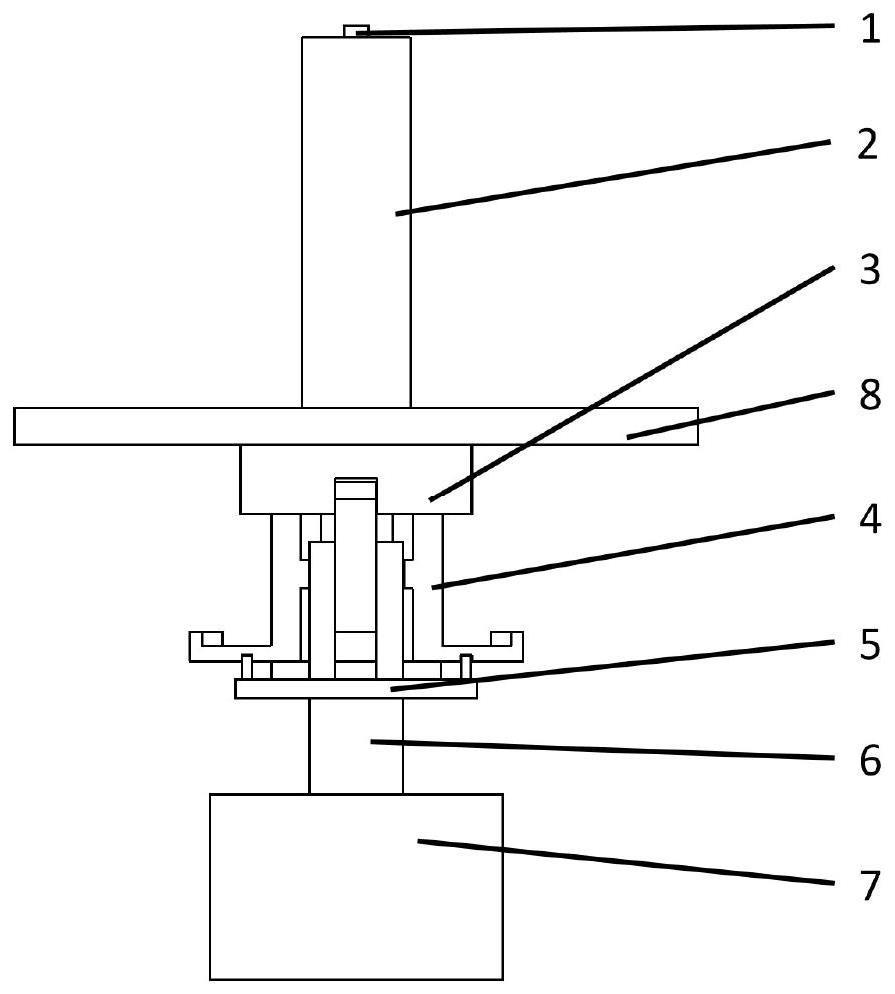
3、一方面,本发明提供了一种具备应急力矩控制模式的主动侧杆操纵装置,自上而下依次包括操纵杆、力矩传感器、锁定机构、离合器、驱动杆、主动侧杆驱动单元和装置壳体:
4、所述操纵杆底部连接所述力矩传感器,所述力矩传感器还与所述锁定机构顶部固定连接,所述锁定机构底部与所述离合器可分离连接,所述离合器连接所述驱动杆,所述驱动杆与所述主动侧杆驱动单元连接,所述主动侧杆驱动单元固定在所述装置壳体上;
5、所述主动侧杆驱动单元,可采用任一可以实现主动侧杆功能的机械结构和设计;
6、所述离合器与所述锁定机构分离时,所述锁定机构连同操纵杆、力矩传感器均锁定在所述装置壳体上。
7、如上所述的任一可能的实现方式,进一步提供一种实现方式,所述力矩传感器、锁定机构、离合器、主动侧杆驱动单元均与飞行控制系统控制连接。
8、如上所述的任一可能的实现方式,进一步提供一种实现方式,所述离合器与驱动杆之间为滑动连接,所述离合器由飞行控制系统或飞行员控制沿所述驱动杆上下滑动。
9、如上所述的任一可能的实现方式,进一步提供一种实现方式,所述离合器初始状态在所述驱动杆上端,所述离合器与所述锁定机构结合,所述锁定机构未触发,所述装置处于正常模式;
10、当所述离合器沿所述驱动杆向下滑动,所述离合器与所述锁定机构分离,触发所述锁定机构,所述锁定机构锁定在所述装置壳体上,所述装置处于应急力矩控制模式。
11、如上所述的任一可能的实现方式,进一步提供一种实现方式,所述操纵杆顶部设置模式切换开关,所述模式切换开关与飞行控制系统控制连接,所述模式切换开关用于在正常模式向应急力矩控制模式切换。
12、如上所述的任一可能的实现方式,进一步提供一种实现方式,所述模式切换开关上设置模式指示灯,用于直观显示当前所处模式,所述模式指示灯与飞行控制系统控制连接。
13、另一方面,本发明还提供了一种具备应急力矩控制模式的主动侧杆操纵方法,使用上述的具备应急力矩控制模式的主动侧杆操纵装置,所述操纵方法包括正常模式和应急力矩控制模式;
14、在正常模式下,所述操纵方法具体为:
15、操作人员手持所述操纵杆,操作力矩依次通过所述力矩传感器、锁定机构、离合器传递给驱动杆,驱动所述驱动杆沿第一定位直线转动实现飞机俯仰操作,沿第二定位直线转动实现飞机滚转操作;第一定位直线为飞机机翼展向方向直线;第二定位直线为飞机航向方向直线。
16、如上所述的任一可能的实现方式,进一步提供一种实现方式,以下给出一个典型利用操纵杆偏转角度控制飞机舵面角度的控制方法(需要说明的是,也可采用其他的控制方法):
17、
18、δθ是舵面偏度改变量;k0是系数;是操纵杆角度偏转;是操纵杆偏转角度改变量;
19、正常模式下屏蔽力矩传感器传递给飞行控制系统的力矩信号。
20、在应急力矩控制模式下,所述操纵方法具体包括:
21、s1、飞行控制系统发出所述锁定机构解锁指令,所述离合器向下移动,所述离合器与所述锁定机构分离;
22、s2、所述锁定机构展开,并锁定在所述装置壳体上;
23、s3、操作人员手持所述操纵杆,操作力矩通过所述力矩传感器、锁定机构到达所述装置壳体;所述力矩传感器测定操作力矩并将测定结果传输给飞行控制系统系统;
24、s4、飞行控制系统根据步骤s3得到的所述操作力矩的大小和方向发出控制指令,控制飞机的俯仰和滚转。
25、应急模式下屏蔽操纵杆(或主动杆驱动装置)的角位移传感器传递给飞行控制系统的角位移信号。
26、如上所述的任一可能的实现方式,进一步提供一种实现方式,以下给出一个典型利用力矩控制飞机舵面角度的控制方法(需要说明的是,也可采用其他的控制方法):
27、δθ=p0(m-δm)
28、δθ是舵面偏度改变量;p0是系数;m是操纵杆初始力矩;δm是操纵杆力矩改变量;
29、如上所述的任一可能的实现方式,进一步提供一种实现方式,飞机飞行过程中,仅进行从正常模式向应急力矩控制模式的单向切换,飞行结束后方进行从应急力矩控制模式向正常模式的切换。
30、本发明的有益效果为:本发明具有应急力矩控制模式,在侧杆的驱动装置或传动机构出现卡阻、失效等故障状态下,切换到应急转换力矩控制模式,将侧杆脱开并锁定在中立位,通过力矩传感器测量飞行员对侧杆施加作用力的大小、方向控制飞机完成俯仰或滚转操作。该操纵装置可以满足不同状态下飞行器控制要求,在提供侧杆主动能力的同时,避免的因为卡阻和失效导致的飞行器失控,为飞行员提供了应急状态下的备份控制模式,进而提升飞行安全。
技术特征:
1.一种具备应急力矩控制模式的主动侧杆操纵装置,其特征在于,所述装置自上而下依次包括操纵杆、力矩传感器、锁定机构、离合器、驱动杆、主动侧杆驱动单元和装置壳体:
2.如权利要求1所述的具备应急力矩控制模式的主动侧杆操纵装置,其特征在于,所述力矩传感器、锁定机构、离合器、主动侧杆驱动单元均与飞行控制系统控制连接。
3.如权利要求1所述的具备应急力矩控制模式的主动侧杆操纵装置,其特征在于,所述离合器与驱动杆之间为滑动连接,所述离合器由飞行控制系统或飞行员控制沿所述驱动杆上下滑动。
4.如权利要求3所述的具备应急力矩控制模式的主动侧杆操纵装置,其特征在于,
5.如权利要求1所述的具备应急力矩控制模式的主动侧杆操纵装置,其特征在于,所述操纵杆顶部设置模式切换开关,所述模式切换开关与飞行控制系统控制连接,所述模式切换开关用于从正常模式向应急力矩控制模式切换。
6.如权利要求5所述的具备应急力矩控制模式的主动侧杆操纵装置,其特征在于,所述模式切换开关上设置模式指示灯,用于直观显示所述装置当前所处工作模式,所述模式指示灯与飞行控制系统控制连接。
7.一种具备应急力矩控制模式的主动侧杆操纵方法,其特征在于,使用如权利要求1-6任一项所述的具备应急力矩控制模式的主动侧杆操纵装置,所述操纵方法包括正常模式和应急力矩控制模式;
8.如权利要求7所述的具备应急力矩控制模式的主动侧杆操纵方法,其特征在于,飞机飞行过程中,进行从正常模式向应急力矩控制模式的单向切换,飞行结束后由维护方进行从应急力矩控制模式向正常模式的切换。
9.如权利要求7所述的具备应急力矩控制模式的主动侧杆操纵方法,其特征在于,在正常模式下,通过测量所述操纵杆的角位移,解耦到单一轴向偏转角度,分别用于控制飞机俯仰、滚转时飞机相应舵面的偏转角度,具体控制方法为:
10.如权利要求7所述的具备应急力矩控制模式的主动侧杆操纵方法,其特征在于,步骤s4中,测量操纵杆轴向力矩,解耦到单一轴向力矩,分别用于控制飞机俯仰、滚转时相应舵面偏转角度,具体控制方法为:
技术总结
本发明涉及驾驶舱集成技术领域,提供了一种具备应急力矩控制模式的主动侧杆操纵装置及方法,所述装置自上而下依次包括操纵杆、力矩传感器、锁定机构、离合器、驱动杆、主动侧杆驱动单元和装置壳体:操纵杆底部连接力矩传感器,力矩传感器同时与锁定机构顶部固定连接,锁定机构底部与离合器可分离连接,离合器连接驱动杆,驱动杆与主动侧杆驱动单元连接,主动侧杆驱动单元固定在所述装置壳体上;离合器与锁定机构分离时,锁定机构锁定在装置壳体上。所述方法包括正常模式和应急力矩控制模式。本发明操纵装置可满足不同状态下飞行器控制要求,在提供侧杆主动能力的同时,提供应急模式,避免因为卡阻和失效导致飞行器失控,提升了飞行安全。
技术研发人员:郭玮,王晓丽,郑凯,芦莎莎,禹梦泽
受保护的技术使用者:中国商用飞机有限责任公司北京民用飞机技术研究中心
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!