测绘无人机
本发明属于无人机,具体涉及一种测绘无人机。
背景技术:
1、现有的测绘无人机在执行一些紧急救援任务中,无法充分发挥优势,测绘无人机搭载设备对现场进行拍摄后需要尽快返回,而现有的无人机结构受限,返回后如果快速降落则有可能会摔坏设备,所以返回时的落地速度受限,从而导致工作效率低下。
技术实现思路
1、为了解决上述背景技术中的问题,本发明的实施例提出一种测绘无人机。
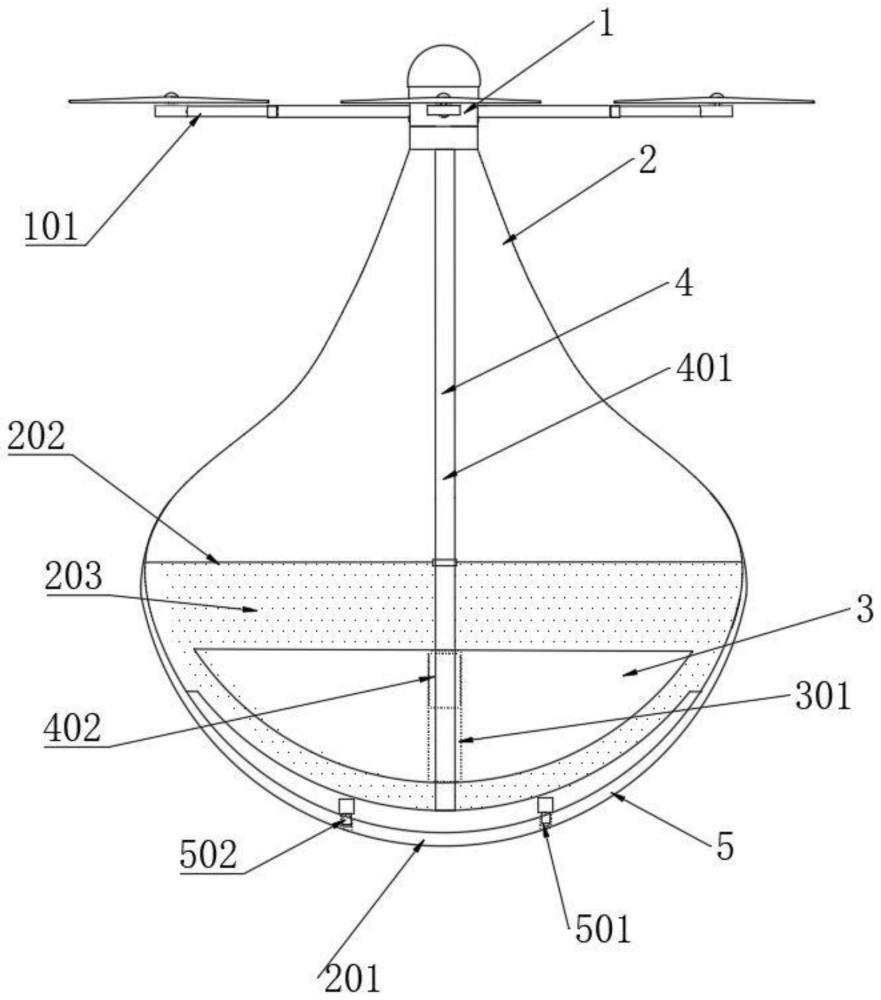
2、本发明实施例的测绘无人机,包括:机架,所述机架周侧设置多个伸缩式机翼和螺旋桨;本体,所述本体设在机架的下方,本体的下部为半球形;电池组,所述电池组通过升降机构设在本体内;功能箱,所述功能箱设在本体的底部,功能箱中对称设有摄像头和红外测距仪;阻尼弹性层,所述阻尼弹性层包裹在本体的下部外层。
3、可选地,所述电池组包括外壳和多个电池,电池组的外壳为半球形,纵向贯穿外壳的中心处设有轴套,轴套的内壁设有内螺纹。
4、可选地,所述所述升降机构包括设置在本体内的滚珠丝杠,滚珠丝杠的丝杠沿中轴线纵向设置在本体中,滚珠丝杠的螺母设在电池组的轴套中,轴套与螺母固定连接。
5、可选地,所述本体中还设置有隔板,隔板横向设置在本体内,且隔板与丝杠之间设有轴承,轴承和丝杠(401)之间设置密封环,和密封环,隔板下方设置有阻尼液,阻尼液填充在电池组的外壳周围。
6、可选地,所述功能箱的箱体对应电池组的一侧为弧形边,该弧形边与电池组的外壳相配合。
7、可选地,所述阻尼弹性层上与摄像头、红外测距仪相对应的位置设在有通孔。
8、可选地,所述本体(2)的构造与落地极限姿态的关系为:
9、
10、其中,m为无人机的质量,g为重力加速度,α为落本体(2)落地过程中重心偏转的允许最大角度,v为无人机落地时水平方向的速度,d为重心与半球形球心之间的距离。
11、可选地,所述本体在落地时机翼到地面的距离与α角之间的关系为:
12、
13、其中,α为落地时本体重心偏转的角度,l为落地时机翼的长度,h为本体底部最低点到机架中心的距离,x为落地时本体底部最低点到原接触点的距离。
14、本发明的有益效果是,本发明通过设置“不倒翁”式的本体,以及本体底部的阻尼弹性层,可以使无人机落地时不倒,从而避免无人机上的设备以及机翼等被摔坏,还提高了无人机回收速度,提高了工作效率;通过滚珠丝杠以及阻尼液的设置,利用无人机的自转使电池组沿着滚珠丝杠移动来调节重心,结构简单,且构思巧妙。
技术特征:
1.一种测绘无人机,其特征在于,包括:
2.根据权利要求1所述的测绘无人机,其特征在于,所述电池组(3)包括外壳和多个电池,电池组(3)的外壳为半球形,纵向贯穿外壳的中心处设有轴套(301),轴套(301)的内壁设有内螺纹。
3.根据权利要求2所述的测绘无人机,其特征在于,所述所述升降机构包括设置在本体(2)内的滚珠丝杠(4),滚珠丝杠(4)的丝杠(401)沿中轴线纵向设置在本体(2)中,滚珠丝杠(4)的螺母(402)设在电池组(3)的轴套(301)中,轴套(301)与螺母(402)固定连接。
4.根据权利要求1所述的测绘无人机,其特征在于,所述本体(2)中还设置有隔板(202),隔板(202)横向设置在本体(2)内,且隔板(202)与丝杠(401)之间设有轴承,轴承和丝杠(401)之间设置密封环,隔板(202)下方设置有阻尼液(203),阻尼液(203)填充在电池组(3)的外壳周围。
5.根据权利要求4所述的测绘无人机,其特征在于,所述功能箱(5)的箱体对应电池组(3)的一侧为弧形边,该弧形边与电池组(3)的外壳相配合。
6.根据权利要求1所述的测绘无人机,其特征在于,所述摄像头(501)通过第一伸缩杆设在本体(2)的底部,所述红外测距仪(502)通过第二伸缩杆设在本体(2)的底部,且红外测距仪(502)与摄像头(501)沿本体(2)的中轴线对称设置。
7.根据权利要求1所述的测绘无人机,其特征在于,所述阻尼弹性层(201)上与摄像头(501)、红外测距仪(502)相对应的位置设在有通孔。
8.根据权利要求1所述的测绘无人机,其特征在于,所述本体(2)的构造与落地极限姿态的关系为:
9.根据权利要求1所述的测绘无人机,其特征在于,所述本体(2)在落地时机翼到地面的距离与α角之间的关系为:
技术总结
本发明公开了一种测绘无人机,包括:机架,所述机架周侧设置多个伸缩式机翼和螺旋桨;本体,所述本体设在机架的下方,本体的下部为半球形;电池组,所述电池组通过升降机构设在本体内;功能箱,所述功能箱设在本体的底部,功能箱中对称设有摄像头和红外测距仪;阻尼弹性层,所述阻尼弹性层包裹在本体的下部外层。本发明通过设置“不倒翁”式的本体,以及本体底部的阻尼弹性层,可以使无人机落地时不倒,从而避免无人机上的设备以及机翼等被摔坏,还提高了无人机回收速度,提高了工作效率。
技术研发人员:赵欣,陈俊潮,张安然,袁斌,许加东,张贵豪,李永川,董晓燕,赵柯柯,孙瑞
受保护的技术使用者:黄河水利职业技术学院
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!