自动收桨装置、旋翼无人机、停机坪及收桨方法与流程
本发明涉及旋翼无人机,尤其涉及自动收桨装置、旋翼无人机、停机坪及收桨方法。
背景技术:
1、旋翼飞行器由于存储运输问题需要把桨叶折叠来节省空间,飞行时由动力电机旋转桨叶离心力自动打开,目前的桨叶折叠多为人工参与手动折叠,无法实现全自动化。
技术实现思路
1、为达到上述目的,本发明提供自动收桨装置,其特征在于,包括:
2、第一连杆,其第一端设置有第一拨杆,所述第一拨杆可相对所述第一连杆运动至桨叶的旋转路径上;
3、第二连杆,其第一端设置有第二拨杆,所述第二拨杆可相对所述第二连杆运动至桨叶的旋转路径上;
4、驱动源,用于驱使所述第一连杆和所述第二连杆同步运动,以使所述第一拨杆和所述第二拨杆分别拨动两个桨叶转动折叠至靠近机臂的位置,并阻挡桨叶相对机臂转动。
5、在一些可能实现的方式中,所述第一连杆的第二端设置有第一蜗轮,所述第二连杆的第二端设置有第二蜗轮,所述驱动源的输出端连接有蜗杆,所述第一蜗轮和所述第二蜗轮分设在所述蜗杆相对的两侧且均与所述蜗杆啮合传动,所述驱动源通过所述蜗杆驱使所述第一蜗轮和所述第二蜗轮转动,以带动所述第一连杆和所述第二连杆同步反向转动。
6、在一些可能实现的方式中,还包括固定座,所述固定座设置在电机安装架的下端,所述驱动源、所述第一蜗轮和所述第二蜗轮均安装于所述固定座,并且所述驱动源的输出轴线与机臂同向设置,所述第一连杆的第二端固定连接于所述第一蜗轮,所述第二连杆的第二端固定连接于所述第二蜗轮。
7、在一些可能实现的方式中,所述第一拨杆铰接于所述第一连杆的第一端,并通过第一动力源驱使其相对所述第一连杆转动;所述第二拨杆铰接于所述第二连杆的第一端,并通过第二动力源驱使其相对所述第二连杆转动。
8、在一些可能实现的方式中,所述第一动力源固定安装于所述第一连杆的第一端,所述第一动力源用于驱使所述第一拨杆转动至所述第一拨杆与所述第一连杆平行或垂直;所述第二动力源固定安装于所述第二连杆的第一端,所述第二动力源用于驱使所述第二拨杆转动至所述第二拨杆与所述第二连杆平行或垂直。
9、在一些可能实现的方式中,所述第一拨杆为伸缩杆并且其一端与所述第一连杆固定连接,所述第二拨杆为伸缩杆并且其一端与所述第二连杆固定连接。
10、在一些可能实现的方式中,所述第一连杆的第二端连接有第一齿轮,所述第二连杆的第二端连接有第二齿轮,所述第一齿轮和所述第二齿轮同模数齿数并且相啮合连接,所述第一齿轮或所述第二齿轮与所述驱动源的输出端驱动连接。
11、本发明还提供一种旋翼无人机,其包括机体以及自所述机体延伸出的若干个机臂,所述机臂远离所述机体的一端设置有至少两个桨叶,如上述实施例的自动收桨装置安装于所述机臂上。
12、本发明还提供一种停机坪,其包括水平工作台,如上述实施例的自动收桨装置安装于所述水平工作台上。
13、本发明还提供一种旋翼无人机自动收桨方法,该方法可在如上述实施例的自动收桨装置上实现,其包括如下步骤:
14、驱动源驱使第一连杆和第二连杆同步运动至第一拨杆/第二拨杆远离机臂的位置;
15、第一拨杆相对第一连杆运动至其一端位于桨叶旋转的路径上,第二拨杆相对第二连杆运动至其一端位于桨叶旋转的路径上;
16、驱动源驱使第一连杆和第二连杆同步运动复位,使得第一拨杆和第二拨杆分别抵接桨叶并驱使桨叶相对机臂转动,以将桨叶折叠收拢至靠近机臂的位置;
17、第一拨杆和第二拨杆均固定在靠近机臂的位置以限制桨叶相对机臂运动。
18、相比现有技术,本发明的有益效果在于:本发明的自动收桨装置在不使用时第一拨杆相对第一连杆运动以远离桨叶的旋转路径,第二拨杆也相对第二连杆运动以远离桨叶的旋转路径,避免干涉桨叶旋转飞行,使用时第一连杆和第二连杆同步运动以驱使第一拨杆/第二拨杆至远离机臂的位置,第一拨杆/第二拨杆再对应相对第一连杆/第二连杆运动至桨叶的旋转路径,第一连杆和第二连杆同步运动复位以驱使第一拨杆/第二拨杆拨动桨叶相对机臂转动,从而将桨叶折叠收拢于靠近机臂的位置,全程无需人工参与,可实现自动化收桨;收拢折叠桨叶后第一拨杆和第二拨杆固定不动,从而限制在包装、运输过程中桨叶相对机臂运动而造成磕碰甚至损坏桨叶的问题。
技术特征:
1.自动收桨装置,其特征在于,包括:
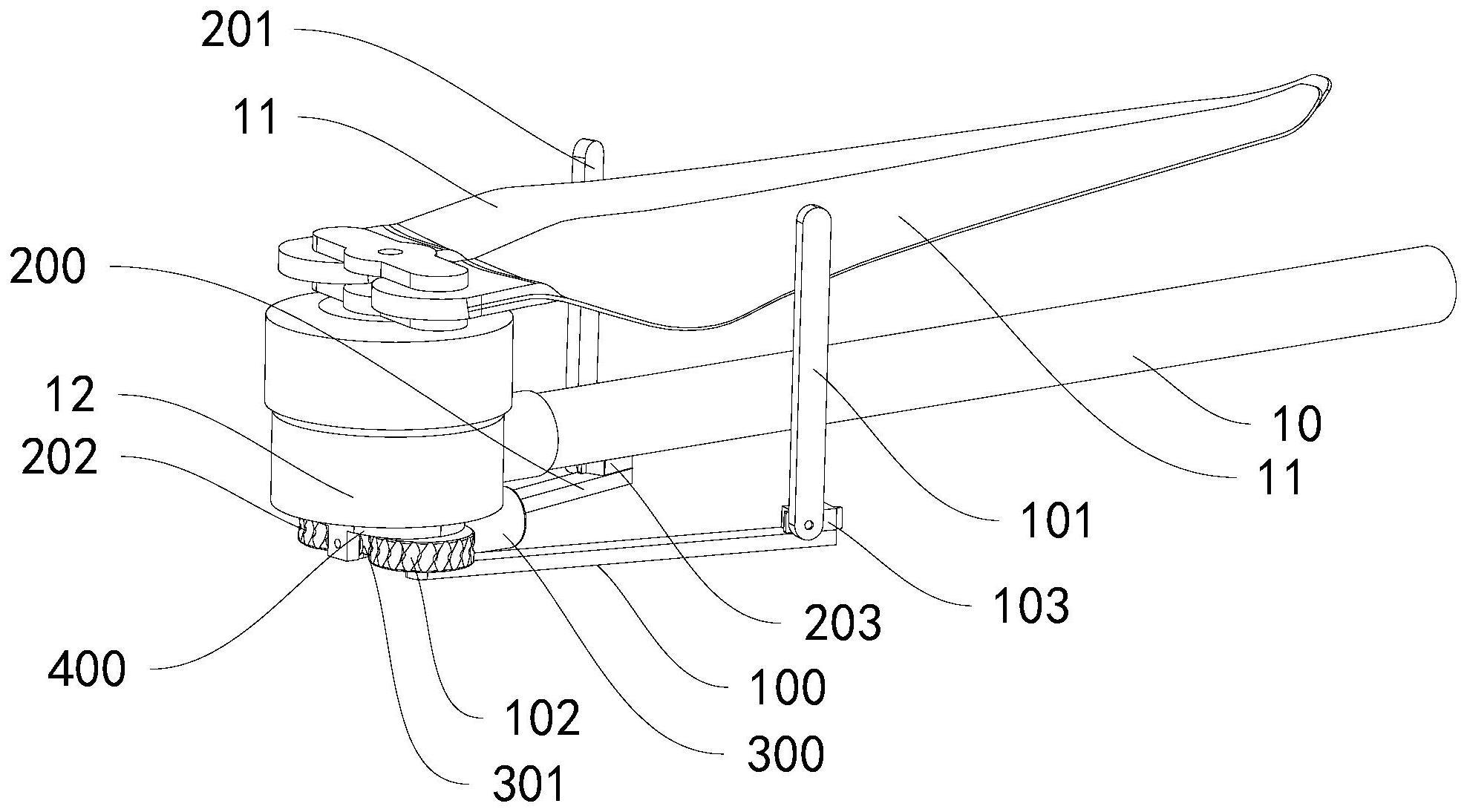
2.根据权利要求1所述的自动收桨装置,其特征在于,所述第一连杆(100)的第二端设置有第一蜗轮(102),所述第二连杆(200)的第二端设置有第二蜗轮(202),所述驱动源(300)的输出端连接有蜗杆(301),所述第一蜗轮(102)和所述第二蜗轮(202)分设在所述蜗杆(301)相对的两侧且均与所述蜗杆(301)啮合传动,所述驱动源(300)通过所述蜗杆(301)驱使所述第一蜗轮(102)和所述第二蜗轮(202)转动,以带动所述第一连杆(100)和所述第二连杆(200)同步反向转动。
3.根据权利要求2所述的自动收桨装置,其特征在于,还包括固定座(400),所述固定座(400)设置在电机安装架(12)的下端,所述驱动源(300)、所述第一蜗轮(102)和所述第二蜗轮(202)均安装于所述固定座(400),并且所述驱动源(300)的输出轴线与机臂(10)同向设置,所述第一连杆(100)的第二端固定连接于所述第一蜗轮(102),所述第二连杆(200)的第二端固定连接于所述第二蜗轮(202)。
4.根据权利要求1所述的自动收桨装置,其特征在于,所述第一拨杆(101)铰接于所述第一连杆(100)的第一端,并通过第一动力源(103)驱使其相对所述第一连杆(100)转动;所述第二拨杆(201)铰接于所述第二连杆(200)的第一端,并通过第二动力源(203)驱使其相对所述第二连杆(200)转动。
5.根据权利要求4所述的自动收桨装置,其特征在于,所述第一动力源(103)固定安装于所述第一连杆(100)的第一端,所述第一动力源(103)用于驱使所述第一拨杆(101)转动至所述第一拨杆(101)与所述第一连杆(100)平行或垂直;所述第二动力源(203)固定安装于所述第二连杆(200)的第一端,所述第二动力源(203)用于驱使所述第二拨杆(201)转动至所述第二拨杆(201)与所述第二连杆(200)平行或垂直。
6.根据权利要求1所述的自动收桨装置,其特征在于,所述第一拨杆(101)为伸缩杆并且其一端与所述第一连杆(100)固定连接,所述第二拨杆(201)为伸缩杆并且其一端与所述第二连杆(200)固定连接。
7.根据权利要求1所述的自动收桨装置,其特征在于,所述第一连杆(100)的第二端连接有第一齿轮,所述第二连杆(200)的第二端连接有第二齿轮,所述第一齿轮和所述第二齿轮同模数齿数并且相啮合连接,所述第一齿轮或所述第二齿轮与所述驱动源(300)的输出端驱动连接。
8.旋翼无人机,其特征在于,包括机体以及自所述机体延伸出的若干个机臂(10),所述机臂(10)远离所述机体的一端设置有至少两个桨叶(11),如权利要求1至7任一项所述的自动收桨装置安装于所述机臂(10)上。
9.停机坪,其特征在于,包括水平工作台,如权利要求1至7任一项所述的自动收桨装置安装于所述水平工作台上。
10.旋翼无人机自动收桨方法,该方法可在如权利要求1至7任一项所述的自动收桨装置上实现,其特征在于,包括如下步骤:
技术总结
本发明涉及旋翼无人机技术领域,尤其涉及自动收桨装置、旋翼无人机、停机坪及收桨方法,本发明的自动收桨装置在使用时第一连杆和第二连杆同步运动以驱使第一拨杆/第二拨杆至远离机臂的位置,第一拨杆/第二拨杆再对应地相对第一连杆/第二连杆运动至桨叶的旋转路径上,以使得第一拨杆/第二拨杆能够接触并拨动桨叶,第一连杆和第二连杆同步运动复位以驱使第一拨杆/第二拨杆拨动桨叶相对机臂转动,从而将桨叶折叠收拢于靠近机臂的位置,全程无需人工参与,可实现自动化收桨;收拢折叠桨叶后第一拨杆和第二拨杆固定不动,从而限制在包装、运输过程中桨叶相对机臂运动而造成磕碰甚至损坏桨叶的问题。
技术研发人员:罗君
受保护的技术使用者:珠海市双捷科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!