一种基于无人机的电机转向检测装置及使用方法与流程
本发明涉及无人机,具体的是一种基于无人机的电机转向检测装置及使用方法。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
2、现有的无人机臂在生产过程容易出现电机线相线顺序焊反而造成电机转向错误,造成无人机无法正常飞行、损坏机身或发生危险事故,而无人机电机工作转速在10000rpm以上,制造过程中即使在电机上外置片条,单纯靠肉眼识别很难辨别转向且易视觉疲劳,或需要对每个电机分别外接电机驱动才能探测或需额外开发探测设备,效率低且成本较高。
3、现有技术中公开了申请号cn202020734534.8的无人机电机转向在线检测装置,通过直接加装在机臂功能测试工装上,采用合页式操作方式,测试机臂功能时将固定直流电机合页合上,无人机主板上电驱动所有电机,利用直流电动机感应电动势方向与旋转方向有关的原理,在被测无人机直流电机(未装桨叶)表面上采用软性连接方式实现被测无人机直流电机带动小直流电机转动,产生感应电动势的方式进行检测。
4、但是现有技术仍存在一定程度的缺陷,如申请号cn202020734534.8的技术方案,在投入使用的过程中,需要非常高的检测精度,且质量越高的电机检测效率越差,电机的工作震动也存在干扰检测结果的可能。而且现有的检测方式可能存在电源的浪费,影响检测电池的使用寿命。
技术实现思路
1、为解决上述背景技术中提到的不足,本发明的目的在于提供一种基于无人机的电机转向检测装置及使用方法。
2、本发明的目的可以通过以下技术方案实现:
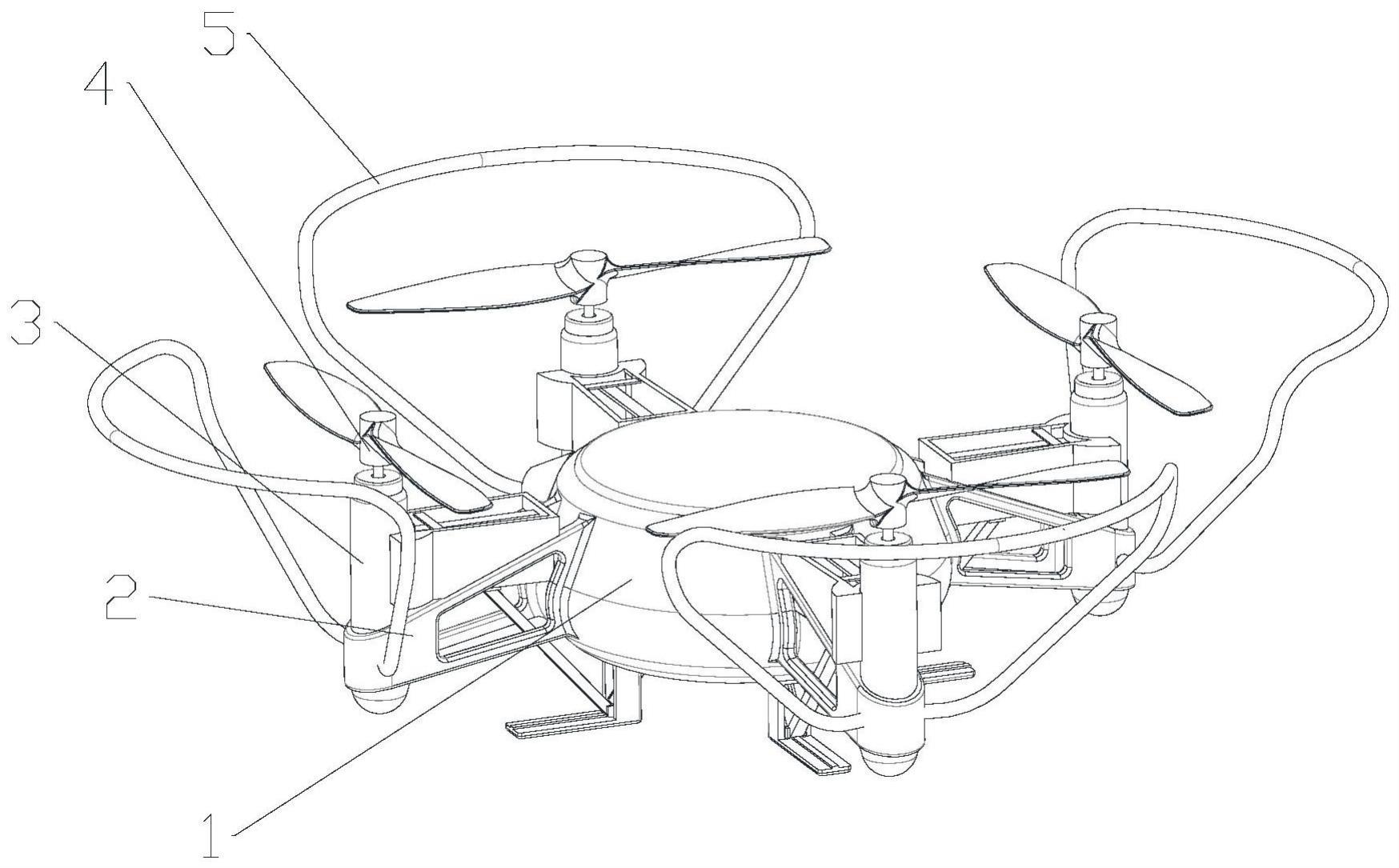
3、一种基于无人机的电机转向检测装置,包括无人机,所述无人机的外侧阵列分布有四个螺旋桨支架,每个螺旋桨支架的顶端均设置有螺旋桨驱动电机,螺旋桨驱动电机的顶端安装有无人机螺旋桨,无人机螺旋桨的外侧固定连接有螺旋桨保护架,无人机的底端对应螺旋桨支架的位置固定连接有支架限位板,支架限位板的底端固定连接有底座板,每个所述螺旋桨支架的顶端均转动连接有检测板;
4、检测板的截面为近似于y型的形状,检测板的底端设置有活动底架,检测板顶端开设有引风槽;
5、所述检测板的底端转动连接有检测支撑杆。
6、进一步地,所述检测支撑杆的位于底端的侧壁固定连接有活动支杆,活动支杆的底端滑动连接于底座板的顶端,活动支杆顶端转动连接有支杆转轴,四个支杆转轴固定连接于同一个升降支架,升降支架内侧设置有升降控制杆,升降控制杆顶端连接有升降推板,升降推板顶端安装于无人机的内侧顶端侧壁。
7、进一步地,所述无人机的外侧壁设置有拍摄机构,拍摄机构前端设置有摄像头。
8、进一步地,所述引风槽内侧中心位置固定安装有控制板,引风槽内侧壁固定连接有柔性杆,柔性杆顶端安装有承风板。
9、进一步地,所述检测板的前端对应控制板的位置开设有控制插口,控制插口内侧设置有控制插头,控制插口前端设置有显示灯,显示灯前端设置有出风口,检测板的底端设置有控制芯片。
10、进一步地,所述承风板的位置设置于控制板顶端,承风板底端的控制板顶部设置有芯片控制按钮。
11、一种基于无人机的电机转向检测方法,包括以下步骤:
12、步骤一:首先通过升降推板拉动位于升降控制杆外侧的升降支架,让升降支架上升,升降支架外侧的支杆转轴也会上升;
13、步骤二:上升的支杆转轴将会带动支杆转轴外侧转动连接的活动支杆在底座板的顶端进行翻转和移动,移动的过程中将会带动其固定连接的检测支撑杆向内侧翻转,带动检测板向底端进行翻转,让检测板底端的活动底架能够嵌入螺旋桨支架内部,维持稳定;
14、步骤三:检测板底端的活动底架能够嵌入螺旋桨支架内部后,检测板前端的控制插口会嵌入螺旋桨驱动电机,让控制插头接通螺旋桨驱动电机,让无人机的四个螺旋桨驱动电机驱动无人机螺旋桨开始旋转;
15、步骤四:启动四个无人机螺旋桨后,通过控制螺旋桨驱动电机让无人机螺旋桨的转速维持稳定,让在旋转的过程中将会保持输出量的稳定,正向安装的无人机螺旋桨会将风吹到底端,形成一个向上的升力,而装反了的无人机螺旋桨则会将风吹向顶端,这个过程中,正常的螺旋桨驱动电机将会保持向下的压力,让检测板持续接收到风的压力,让承风板向下压动,使得控制板顶端的芯片控制按钮能够维持被压住的状态,而装反了的无人机螺旋桨则不能提供稳定向下的风压力,无法维持芯片控制按钮维持被压住的状态;
16、步骤五:在上一个步骤的风机维持稳定工作后,通过观察检测板前端的显示灯,判断其对应的电机是否是装反了的状态,正常工作状态下,检测板前端的显示灯将会开启,维持明亮状态,之后承风板底端的芯片控制按钮被按压后会关闭螺旋桨驱动电机,让螺旋桨驱动电机关闭顶端的无人机螺旋桨,并关闭检测板前端的显示灯;
17、而装反了的螺旋桨驱动电机将会让显示灯维持明亮状态,反装的无人机螺旋桨将不会对底端的承风板产生相应的风压力,因此会让显示灯维持明亮的状态,也会让错误的无人机螺旋桨维持工作状态,便于工作人员对错误的电机进行处理。
18、本发明的有益效果:
19、1、本发明通过采用一对一的检测方式,每个无人机螺旋桨的电机单独进行检测,提高检测精度,同时在电机工作状态下能够通过开关电机的方式进行精准定位,正确安装的电机直接停止工作,并关闭显示灯,而错误的电机将保持工作状态,并维持显示灯的开启,便于工作人员精确定位问题,及时进行处理;
20、2、本发明在关闭状态下,整个线路的负载降到最低,能够最大程度上保持检测电池的电量,在非工作状态下能够很大程度上保持内部机构的使用寿命,也能延长电池的使用寿命,一定程度上降低了使用成本;
21、3、本发明采用内部芯片控制,整体机构重量很轻,便于携带,能够更大范围进行使用。
技术特征:
1.一种基于无人机的电机转向检测装置,包括无人机(1),其特征在于,所述无人机(1)的外侧阵列分布有四个螺旋桨支架(2),每个螺旋桨支架(2)的顶端均设置有螺旋桨驱动电机(3),螺旋桨驱动电机(3)的顶端安装有无人机螺旋桨(4),无人机螺旋桨(4)的外侧固定连接有螺旋桨保护架(5),无人机(1)的底端对应螺旋桨支架(2)的位置固定连接有支架限位板(8),支架限位板(8)的底端固定连接有底座板(9),每个所述螺旋桨支架(2)的顶端均转动连接有检测板(6);
2.根据权利要求1所述的一种基于无人机的电机转向检测装置,其特征在于,所述检测支撑杆(7)的位于底端的侧壁固定连接有活动支杆(10),活动支杆(10)的底端滑动连接于底座板(9)的顶端,活动支杆(10)顶端转动连接有支杆转轴(11),四个支杆转轴(11)固定连接于同一个升降支架(12),升降支架(12)内侧设置有升降控制杆(13),升降控制杆(13)顶端连接有升降推板(14),升降推板(14)顶端安装于无人机(1)的内侧顶端侧壁。
3.根据权利要求1所述的一种基于无人机的电机转向检测装置,其特征在于,所述无人机(1)的外侧壁设置有拍摄机构(15),拍摄机构(15)前端设置有摄像头(16)。
4.根据权利要求1所述的一种基于无人机的电机转向检测装置,其特征在于,所述引风槽(62)内侧中心位置固定安装有控制板(63),引风槽(62)内侧壁固定连接有柔性杆(64),柔性杆(64)顶端安装有承风板(65)。
5.根据权利要求4所述的一种基于无人机的电机转向检测装置,其特征在于,所述检测板(6)的前端对应控制板(63)的位置开设有控制插口(66),控制插口(66)内侧设置有控制插头(67),控制插口(66)前端设置有显示灯(68),显示灯(68)前端设置有出风口(69),检测板(6)的底端设置有控制芯片(610)。
6.根据权利要求5所述的一种基于无人机的电机转向检测装置,其特征在于,所述承风板(65)的位置设置于控制板(63)顶端,承风板(65)底端的控制板(63)顶部设置有芯片控制按钮。
7.一种基于无人机的电机转向检测方法,包括如权利要求1-6任一项所述的一种基于无人机的电机转向检测装置,其特征在于,包括以下步骤:
技术总结
本发明公开一种基于无人机的电机转向检测装置及使用方法,涉及无人机技术领域,包括无人机,所述无人机的外侧阵列分布有四个螺旋桨支架,每个螺旋桨支架的顶端均设置有螺旋桨驱动电机,螺旋桨驱动电机的顶端安装有无人机螺旋桨,无人机螺旋桨的外侧固定连接有螺旋桨保护架,无人机的底端对应螺旋桨支架的位置固定连接有支架限位板;同时,本发明在使用时,通过采用一对一的检测方式,每个无人机螺旋桨的电机单独进行检测,提高检测精度,同时在电机工作状态下能够通过开关电机的方式进行精准定位,正确安装的电机直接停止工作,并关闭显示灯,而错误的电机将保持工作状态,并维持显示灯的开启,便于工作人员精确定位问题,及时进行处理。
技术研发人员:汲自强,李张军,张志峰
受保护的技术使用者:安徽智鸥驱动科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!