一种电动倾转旋翼飞行器及其控制系统的制作方法
本发明涉及飞行器,尤其涉及一种电动倾转旋翼飞行器及系统。
背景技术:
1、随城市道路车辆密度的不断增加,人类日常通勤时间逐渐增加。凭借城市存在尚未完全开发利用的中低空域这一有利条件,城市空中交通(uam,urban air mobility)的概念被人们提出。电动垂直起降飞行器凭借绿色环保、对基础设施依赖程度小的重要优势成为最主要的城市空中交通解决方案。目前行业内存在两种常见布局形式,一种布局为多旋翼布局形式:这类飞行器依靠多组升力旋翼提供飞行器垂直起降以及前飞动力,因不具备直升机旋翼同样复杂的机械结构,飞行速度因受到旋翼载荷的限制而较低,同时由于飞行效率较低导致续航能力较差;另一种常见布局为“升+推”组合布局形式:这类飞行器结合传统固定旋翼布局在其上增加多组升力旋翼以实现垂直起降的功能,在巡航时升力旋翼关闭仅依靠推进动力前飞,升力旋翼在巡航阶段产生的废阻力将会较大地降低飞行效率。
2、为此,本发明设计了一种电动倾转旋翼飞行器。并且同步设计了电动倾转旋翼飞行器的操作控制方法及其电气控制方法。
技术实现思路
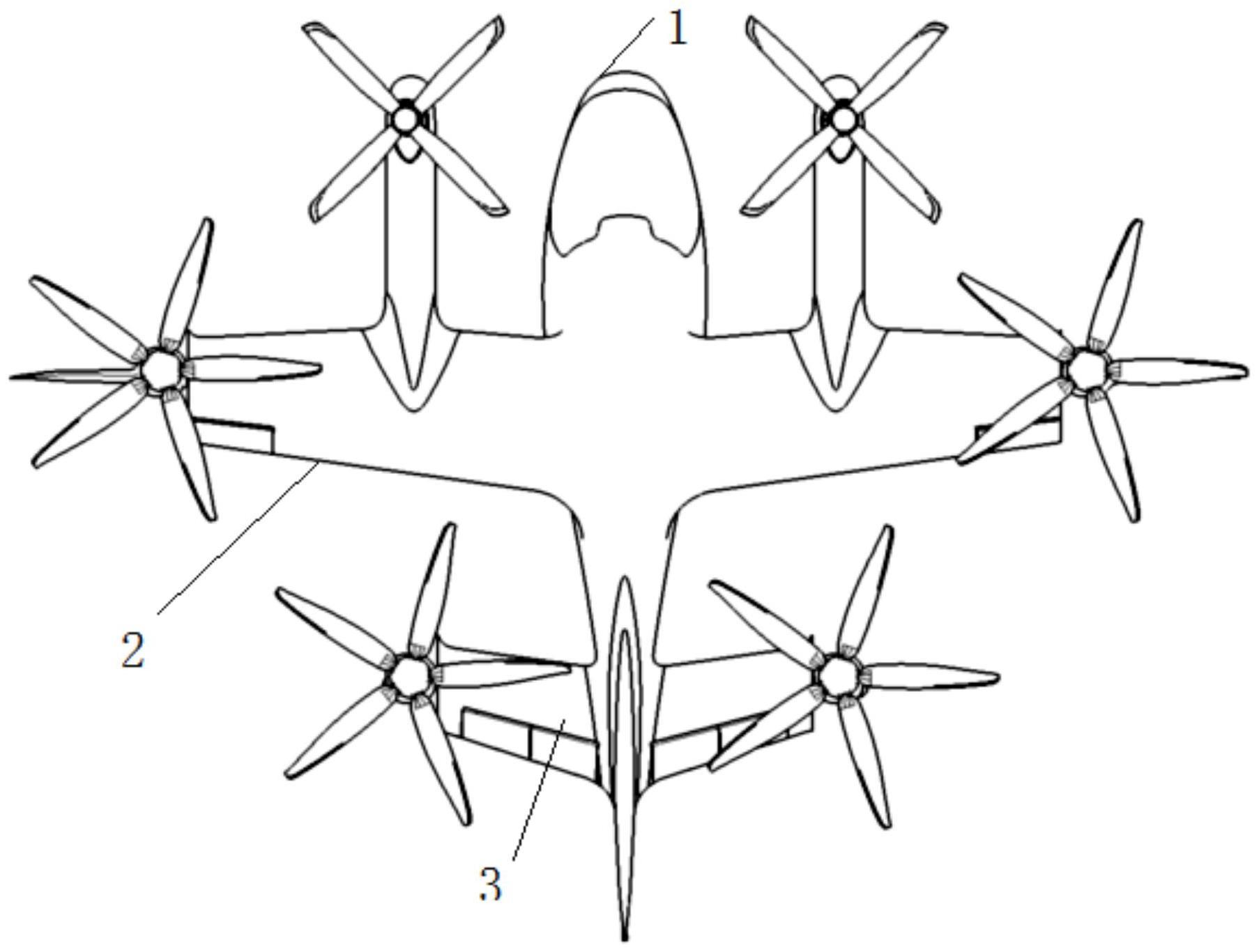
1、本发明提供了一种电动倾转旋翼飞行器,包括:机身、机翼、平尾、起落架;
2、机身包括机身本体和方向舵,机身本体集成舱门、风挡玻璃、下视窗和后视窗,方向舵安装在机身本体后方,用于控制和调节飞行器飞行方向;机身本体内设置座舱包括显控台、飞行员座椅、前排乘客座椅、后排乘客座椅,座舱后部为行李舱;
3、机翼翼身结构为分离方式,包括整体式机翼盒段、副翼、机翼左/右短舱和撑杆左/右短舱,整体式机翼盒段前侧集成左右撑杆,机翼左/右短舱与整体式机翼盒段通过倾转轴相连,机翼左/右短舱绕倾转轴旋转;机翼左/右短舱内部设置有电机和控制器,旋翼安装在电机输出轴上;机翼采用上单鸥翼布置,提升机翼及旋翼的离地高度;
4、平尾包括平尾盒段和平尾左/右短舱,平尾左/右短舱与平尾盒段通过倾转轴相连,左/右平尾绕倾转轴旋转;
5、在撑杆左/右短舱上、机翼左/右短舱上,以及平尾左/右短舱中均安装旋翼,机翼左/右短舱和左/右平尾短舱上旋翼为旋翼,绕倾转轴转动;撑杆左/右短舱上的旋翼为可折叠固定旋翼,可折叠但位置固定不能倾转;机翼左/右短舱和左/右平尾短舱均包括组装成一体的短舱肋和舵机安装框,舵机安装框固定舵机支架,舵机支架通过螺纹销钉安装舵机,舵机绕螺纹销钉轴线转动;舵机的一端通过倾转舵机臂固定在倾转轴上;舵机通过驱动舵机的可伸缩推杆,带动短舱部分倾转;
6、起落架采用三点式起落架,包括一个前起落架两个主起落架,主起落架中集成有刹车系统,在飞行器落地时起到刹车作用,前起落架起平衡和方向控制的作用。
7、如上所述的一种电动倾转旋翼飞行器,其中,座舱排布采用1+2+2式,即第一排为一个飞行员座椅,座椅部署位置居中,第二排为两个前排乘客座椅、第三排为两个后排乘客座椅;在打开左/右舱门之后,第三排旅客通过第一排与第二排座椅之间的空间即可到达自己的座位;飞行员从左/右舱门登机后通过两侧过道到达飞行员座椅。
8、如上所述的一种电动倾转旋翼飞行器,其中,飞行员座椅前方为仪表台,前仪表台稍微偏右,保证驾驶员眼位在pfd中间,座椅的左右两侧分别部署油门台和侧杆;驾驶员通过控制油门台和侧杆,实现飞机的加/减速、上升/下降、俯仰、横滚、转弯。
9、如上所述的一种电动倾转旋翼飞行器,其中,设置旋翼为五叶旋翼,五叶旋翼连接变距机构,变距机构是一种力矩传递结构,用于放大操纵输入位移大小、放大操纵输入力大小、或者将弧线运动操纵输入转换为严格的直线运动输出,用于改变旋翼的桨叶角,变距机构包括力矩输入点结构、力矩传递结构和力矩输出点结构。
10、如上所述的一种电动倾转旋翼飞行器,其中,力矩输入点结构包括一体成型的操纵杆和输入端块,输入端块固定在操纵杆的一端,输入端块连接舵机的舵机臂/推杆,通过舵机臂/推杆的运动带动操纵杆转动;操纵杆的另一端连接力矩传递结构,力矩传递结构顶端连接多个力矩输出点结构,操纵杆转动带动力矩传递结构运动,力矩传递结构将运动传递给力矩输出点结构,带动力矩输出点结构运动;每个力矩输出点结构上端与旋翼对应的桨叶桨毂变距铰直连,力矩输出点结构运动带动桨叶桨毂变距铰运动,由此实现桨叶角的变化。
11、如上所述的一种电动倾转旋翼飞行器,其中,固定旋翼设置为四叶可折叠旋翼。
12、如上所述的一种电动倾转旋翼飞行器,其中,舵机具体包括舵机杆、可伸缩推杆和倾转舵机臂,舵机支架上的螺纹销钉固定舵机杆,可伸缩推杆插入舵机杆内并与舵机杆可伸缩连接,在舵机杆内设置舵机电机,舵机电机驱动可伸缩推杆沿舵机杆内外伸缩,可伸缩推杆的另一端通过紧固件固定倾转舵机臂的一端,倾转舵机臂的另一端套接在倾转轴上,并与倾转轴固定。
13、如上所述的一种电动倾转旋翼飞行器,其中,飞行器的构型模式包括多旋翼模式、过渡模式和固定旋翼模式;飞行器使用多旋翼模式进行起降,在空中进行多旋翼模式、过渡模式以及固定翼模式的动态切换。
14、本发明实现的有益效果如下:本发明提供一种电动倾转旋翼飞行器,从结构、动力系统、控制系统分别介绍了飞行器的整体构造模式,解决垂直起降航空器过渡转换过程面临的难题,动力系统为整机提供多种高压架构动力,且能够有效防止单点失效引起的安全性问题,控制系统实现精确的垂直起降控制、倾转过渡控制和固定旋翼巡航飞行控制,提高飞行器飞行准确率和安全性。
技术特征:
1.一种电动倾转旋翼飞行器,其特征在于,所述飞行器的电压架构包括:高压架构和低压架构;
2.如权利要求1所述的一种电动倾转旋翼飞行器,其特征在于,六个电动机分别为电动机1#、电动机2#、电动机3#、电动机4#、电动机5#、电动机6#,电动机1#和电动机6#分别用来带动左右撑杆上的可折叠旋翼的转动,电动机2#和电动机5#分别用来带动机翼左/右短舱上的旋翼转动,电动机3#和电动机4#分别用来带动机翼左/右平尾短舱上的旋翼转动。
3.如权利要求2所述的一种电动倾转旋翼飞行器,其特征在于,四个动力电池分别为动力电池1#、动力电池2#、动力电池3#、动力电池4#,动力电池1#连接电动机1#、电动机3#和电动机5#;动力电池2#连接电动机2#、电动机4#和电动机6#;动力电池3#连接电动机1#、电动机3#和电动机5#;动力电池4#连接电动机电动机2#、电动机4#和电动机6#。
4.如权利要求3所述的一种电动倾转旋翼飞行器,其特征在于,动力电池1#的第一路高压连接电动机1#的逆变器1b,动力电池1#的第二路高压连接电动机3#的逆变器3b,电动机1#的第三路高压连接电动机5#的逆变器5b;动力电池2#的第一路高压连接电动机2#的逆变器2b,动力电池1#的第二路高压连接电动机4#的逆变器4b,电动机2#的第三路高压连接电动机6#的逆变器6b;动力电池3#的第一路高压连接电动机1#的逆变器1a,动力电池3#的第二路高压连接电动机3#的逆变器3a,电动机3#的第三路高压连接电动机5#的逆变器5a;动力电池4#的第一路高压连接电动机2#的逆变器2a,动力电池4#的第二路高压连接电动机4#的逆变器4a,电动机4#的第三路高压连接电动机6#的逆变器6a。
5.如权利要求4所述的一种电动倾转旋翼飞行器,其特征在于,当单逆变器失效时,电动机转矩下降,则通过降低对侧电动机功率而实现稳定操作。
6.如权利要求4所述的一种电动倾转旋翼飞行器,其特征在于,当单动力电池失效时,则控制该失效动力电池连接的三个电机功率降低,三个电机刚好相间,则力矩仍平衡。
7.如权利要求4所述的一种电动倾转旋翼飞行器,其特征在于,当两个相邻的动力电池失效时,控制所有电动机都处于单逆变器状态。
8.如权利要求4所述的一种电动倾转旋翼飞行器,其特征在于,增加第五个动力电池5#连接所有动力电池的配电电路,动力电池5#在应急情况下,为所有动力电池补充电能,实现各动力电池向对应电机补充电能。
9.如权利要求4所述的一种电动倾转旋翼飞行器,其特征在于,采用六个动力电池和六个电动机,每个电动机分别连接两个动力电池的逆变器。
技术总结
本发明公开一种电动倾转旋翼飞行器及其控制系统。所述飞行器包括:机身包括机身本体和方向舵,控制和调节飞行器飞行方向;机翼翼身结构为分离方式,包括整体式机翼盒段、副翼、机翼左/右短舱和撑杆左/右短舱,整体式机翼盒段前侧集成左右撑杆,机翼左/右短舱与整体式机翼盒段通过倾转轴相连,机翼左/右短舱绕倾转轴旋转;平尾包括平尾盒段和平尾左/右短舱,平尾左/右短舱与平尾盒段通过倾转轴相连,左/右平尾绕倾转轴旋转;起落架采用三点式起落架,主起落架中集成有刹车系统,前起落架起平衡和方向控制的作用。采用本发明提供的电动倾转旋翼飞行器,能够实现城市空中交通。
技术研发人员:黄寅吉,黄雍威,蒋俊
受保护的技术使用者:上海时的科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!