用于多旋翼飞行器对接限位的卡爪机构及其工作方法
本发明涉及航空航天飞行器领域,具体是一种用于多旋翼飞行器对接限位的卡爪机构。
背景技术:
1、随着旋翼飞行器技术的发展与成熟,运载平台搭载飞行器和多飞行器协同作业成为未来的发展趋势并越来越多的应用到生产生活中。具体体现在:覆盖范围广,无人机运载平台可以采用投递的方式将飞行器投放在目标区域的各子区域内,扩大任务范围;任务时间长,运载平台可为飞行器进行电力传输,保证更长的续航时间;环境适应性强,平台可搭载用以执行多架用以特定任务的飞行器实现全方位作业,并且可实现信息传输和数据交换,提高系统效能。
2、平台搭载的飞行器需要避免由于运载平台颠簸、变速等引起的抖动甚至掉落等问题,其可靠牢固的对接直接关系到整个系统的可靠性和稳定性。而现有的机械臂对接、飞钩式对接都具有较高的精度和稳定性,但对接过程需要复杂的控制技术,且机械臂和飞钩结构难以满足旋翼飞行器再起飞的条件;磁吸式对接可实现简单快速的对接,但其稳定性和承载能力相对较差。而利用红外传感器引导实现对接的方式具有较高的自主性,但容易受到环境条件影响,也依赖传感器的精度条件。
技术实现思路
1、本发明为了解决现有技术中决单一飞行器单独执行任务时范围小、续航低、适应性差的问题,提供了一种用于多旋翼飞行器对接限位的卡爪机构及其工作方法,可用于多种运载平台和飞行器的对接,完成物资运输、地质勘探、能源补给等任务。
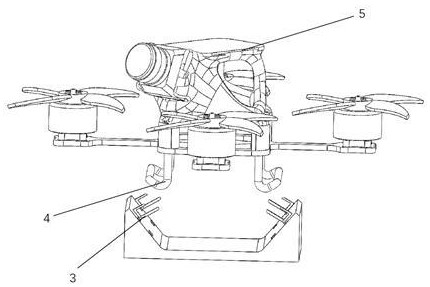
2、本发明提供了一种用于多旋翼飞行器对接限位的卡爪机构,包括具有起落架的多旋翼飞行器以及与起落架配合连接的对接台,所述对接台为凹形方座,凹形方座上分布有若干与起落架位置对应的对接卡爪以及与对接卡爪对应的电磁铁;对接卡爪通过转轴结构与对接台连接,起落架下降后压迫对接卡爪转动,对接卡爪转动的极限位置与电磁铁接触实现对接限位。
3、进一步改进,所述对接卡爪为由短卡爪臂、底边和长卡爪臂组成的凹形框体,起落架下降时卡入凹形框体的凹槽内。
4、进一步改进,所述转轴结构设置在对接卡爪底边和长卡爪臂的交接处,与起落架分离状态时对接卡爪的底边与凹形方座接触,与起落架接触后短卡爪臂卡住起落架实现对接限位,长卡爪臂转动与电磁铁接触并锁紧。
5、进一步改进,所述对接台通过对接安置台与被接入飞行器固定连接。所述被接入飞行器为多旋翼飞行器或固定翼飞行器。
6、本发明还提供了一种用于多旋翼飞行器对接限位的卡爪机构的工作方法,包括对接过程和再起飞过程;
7、对接过程为:多旋翼飞行器降落时,下方的起落架位于对接卡爪正上方,此时卡爪臂无外力作用先上张开;多旋翼飞行器降落后起落架首先与长卡爪臂接触,在其自身重力作用下将对接卡爪下压,短卡爪臂会在运动中卡在起落架的上方;下压一定高度后,对接卡爪在电磁铁的作用下被固定,短卡爪臂将起落固定在特定位置,实现对接过程;
8、再起飞过程为:多旋翼飞行器准备升空时电磁铁断开使磁吸作用消失,多旋翼飞行器在自身动力机构产生的升力的作用上升,上升过程中会对短卡爪臂产生一个扭矩,带动对接卡爪旋转运动,上升到一定高度后,短卡爪臂不再妨碍多旋翼飞行器的正常飞行运动,多旋翼飞行器成功升空。
9、本发明有益效果在于:
10、1、多旋翼飞行器在距离对接台一定范围内可在自身重力的作用下与多旋翼飞行器上对接限位卡爪完成对接,并可实现再起飞的任务。
11、2、多旋翼飞行器和运载平台的对接结构可有效解决单一飞行器单独执行任务时范围小、续航低、适应性差的问题。
12、3、可用于多种运载平台和飞行器的对接,运载平台与多旋翼无人机协同执行任务时使多旋翼飞行器与之紧密联系成一个整体,解决了例如无人机僚机并行飞行等诸如此类所造成的材料、资源以及能量浪费等问题,有利于协同高效完成任务。
技术特征:
1.一种用于多旋翼飞行器对接限位的卡爪机构,包括具有起落架的多旋翼飞行器以及与起落架配合连接的对接台,其特征在于:所述对接台为凹形方座,凹形方座上分布有若干与起落架位置对应的对接卡爪以及与对接卡爪对应的电磁铁;对接卡爪通过转轴结构与对接台连接,起落架下降后压迫对接卡爪转动,对接卡爪转动的极限位置与电磁铁接触实现对接限位。
2.根据权利要求1所述的用于多旋翼飞行器对接限位的卡爪机构,其特征在于:所述对接卡爪为由短卡爪臂、底边和长卡爪臂组成的凹形框体,起落架下降时卡入凹形框体的凹槽内。
3.根据权利要求2所述的用于多旋翼飞行器对接限位的卡爪机构,其特征在于:所述转轴结构设置在对接卡爪底边和长卡爪臂的交接处,与起落架分离状态时对接卡爪的底边与凹形方座接触,与起落架接触后短卡爪臂卡住起落架实现对接限位,长卡爪臂转动与电磁铁接触并锁紧。
4.根据权利要求1所述的用于多旋翼飞行器对接限位的卡爪机构,其特征在于:所述对接台通过对接安置台与被接入飞行器固定连接。
5.根据权利要求4所述的用于多旋翼飞行器对接限位的卡爪机构,其特征在于:所述被接入飞行器为多旋翼飞行器或固定翼飞行器。
6.一种用于多旋翼飞行器对接限位的卡爪机构的工作方法,其特征在于:包括对接过程和再起飞过程;
技术总结
本发明公开了一种用于多旋翼飞行器对接限位的卡爪机构及其工作方法,本发明的多旋翼飞行器在下降接触卡爪机构的过程中通过自身重力使卡爪机构短臂端卡住多旋翼飞行器起落架,在下降一定高度后通过电磁铁吸附卡爪机构来使卡爪机构与被接入飞行器的固联,从而保证多旋翼飞行器的对接限位。当飞行器需要再起飞时,电磁铁断开使磁吸作用消失,多旋翼飞行器能通过自身动力机构的升力上升,从而脱离卡爪机构。本发明解决了一定裕度内飞行器偏转不稳的对接问题,保证了小型旋翼飞行器与被接入飞行器可以在复杂颠簸环境中在飞行姿态不稳的情况下通过卡爪机构和电磁铁实现稳定降落回收,而后又可在复杂场景下实现稳定复飞。
技术研发人员:潘愉锴,黄阿鹏,余文浩,唐震,孙宇,郭玉杰
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!