仿生扑翼飞行器
本发明属于无人机,具体地讲,涉及一种仿生扑翼飞行器。
背景技术:
1、自然界的飞行生物之所以具有高超的飞行能力,高效的气动效率以及较低的能量消耗,主要归功于翼翅的收缩变形能力,其可以根据不同的飞行任务调整不同的翼翅姿态以及在下扑展开、上扑收缩。
2、微型扑翼飞行器是一种模仿生物飞行的新概念飞行器,具有仿生度高、效率高、机动性好等优点,若搭载微小传感器、微型摄像头以及飞控系统,形成仿生无人平台,将会有非常广阔的应用前景。鉴于此,世界各国研究人员展开了大量的研究,并且也取得了一些研究成果,主要可分为单自由度和多自由度扑翼飞行器。其中,单自由度扑翼飞行器仅仅能实现单自由度的往复运动,仿生度低;多自由度扑翼飞行器虽然在飞行动作上与飞行生物更接近,仿生度也更高,但大多是通过复杂的扑翼驱动机构实现,通过一个或多个动力源带动翼翅的扑动和收缩复合运动,不可避免的会增加重量、增加结构复杂程度,降低整机的可靠性,存在无法小型化、轻量化的问题。
3、目前的扑翼飞行器主要有单一动力源方案和多个动力源方案。单个动力源方案例如公开号为cn108945432a的专利中,采用单电机驱动,通过复杂的机械传动结构同时实现翼翅的扑动和收缩,其主要问题是结构过于复杂,难以实现小型化。多个动力源方案例如公开号为cn201354146y的专利中,扑动和收缩运动分别通过两个驱动器带动两套机械传动结构分别实现翼翅的扑动和收缩复合运动,其主要问题是结果过于复杂,耦合度较低。
技术实现思路
1、本发明解决的技术问题是:如何提高扑翼飞行器的扑动和伸缩运动的耦合度和降低扑翼飞行器的结构复杂度。
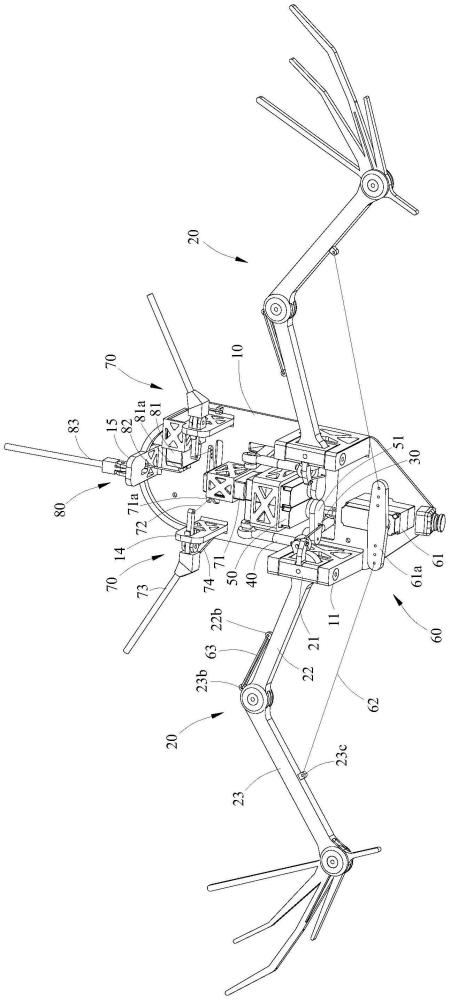
2、本申请提供了一种仿生扑翼飞行器,所述仿生扑翼飞行器包括:
3、机身;
4、翼翅,所述翼翅可转动地安装于所述机身的两侧;
5、扑动机构,所述扑动机构安装于所述机身且与所述翼翅传动连接,所述扑动机构用于带动所述翼翅进行扑动;
6、伸缩机构,所述伸缩机构安装于所述机身且与所述翼翅传动连接,所述伸缩机构用于带动所述翼翅进行伸缩;
7、动力源,所述动力源用于同时向所述扑动机构和伸缩机构提供动力。
8、可选地,所述翼翅包括依次远离所述机身的内翼和外翼,所述外翼与所述内翼转动连接,所述内翼与所述机身转动连接,所述扑动机构、所述伸缩机构分别与所述内翼传动连接。
9、可选地,所述内翼包括包括肩部件和肱骨连杆,所述肩部件转动连接于所述机身,所述肱骨连杆与所述肩部件转动连接,所述扑动机构传动连接于所述肩部件以用于带动所述肩部件和所述肱骨连杆绕第一转轴方向转动,所述伸缩机构传动连接于所述肱骨连杆以用于带动所述肱骨连杆绕第二转轴方向转动,所述第一转轴方向与所述第二转轴方向相互垂直。
10、可选地,所述动力源为舵机,所述舵机的摇臂分别与所述扑动机构、所述伸缩机构传动连接,以同时向所述扑动机构和伸缩机构提供动力。
11、可选地,所述扑动机构包括扑动连杆,所述扑动连杆的两端分别转动连接于所述肩部件和所述摇臂,所述摇臂的转轴方向与所述第一转轴方向平行。
12、可选地,所述伸缩机构包括第一球头连杆、l型连杆和第二球头连杆,所述第一球头连杆的两端分别转动连接于所述摇臂和所述l型连杆,所述第二球头连杆的两端分别转动连接于所述l型连杆和所述肱骨连杆,所述l型连杆的中部转动连接于所述机身。
13、可选地,所述外翼包括依次远离所述机身的桡骨连杆和指骨件,所述桡骨连杆与所述肱骨连杆转动连接,所述指骨件与所述桡骨连杆转动连接,所述桡骨连杆和所述指骨件的转轴方向均平行于所述第二转轴方向。
14、可选地,所述仿生扑翼飞行器还包括驱动机构,所述驱动机构用于驱动所述桡骨连杆转动,以带动所述外翼进行伸缩动作。
15、可选地,所述驱动机构包括收缩舵机、拉绳、弹性件,所述收缩舵机安装于所述机身,所述拉绳的两端分别连接于所述收缩舵机的摇臂和所述桡骨连杆,所述弹性件的两端连接于所述桡骨连杆和所述肱骨连杆,且所述拉绳、所述弹性件分别位于所述肱骨连杆的两侧。
16、可选地,所述外翼还包括扭簧,所述扭簧安装于所述桡骨连杆和所述指骨件的连接处,所述扭簧的一端穿设于所述桡骨连杆的内部且所述扭簧的另一端穿设于所述指骨件的内部。
17、本发明公开的一种仿生扑翼飞行器,具有如下技术效果:
18、该仿生扑翼飞行器采用单一动力源同时驱动扑动机构、伸缩机构,使得翼翅的扑动和伸缩可以同时进行,提升了扑动和伸缩的耦合性,扑动机构和伸缩机构相互独立的结构且均直接连接动力源,两者不需要进行互相装配,降低了飞行器的结构复杂度。
技术特征:
1.一种仿生扑翼飞行器,其特征在于,所述仿生扑翼飞行器包括:
2.根据权利要求1所述的仿生扑翼飞行器,其特征在于,所述翼翅包括依次远离所述机身的内翼和外翼,所述外翼与所述内翼转动连接,所述内翼与所述机身转动连接,所述扑动机构、所述伸缩机构分别与所述内翼传动连接。
3.根据权利要求2所述的仿生扑翼飞行器,其特征在于,所述内翼包括包括肩部件和肱骨连杆,所述肩部件转动连接于所述机身,所述肱骨连杆与所述肩部件转动连接,所述扑动机构传动连接于所述肩部件以用于带动所述肩部件和所述肱骨连杆绕第一转轴方向转动,所述伸缩机构传动连接于所述肱骨连杆以用于带动所述肱骨连杆绕第二转轴方向转动,所述第一转轴方向与所述第二转轴方向相互垂直。
4.根据权利要求3所述的仿生扑翼飞行器,其特征在于,所述动力源为舵机,所述舵机的摇臂分别与所述扑动机构、所述伸缩机构传动连接,以同时向所述扑动机构和伸缩机构提供动力。
5.根据权利要求4所述的仿生扑翼飞行器,其特征在于,所述扑动机构包括扑动连杆,所述扑动连杆的两端分别转动连接于所述肩部件和所述摇臂,所述摇臂的转轴方向与所述第一转轴方向平行。
6.根据权利要求4所述的仿生扑翼飞行器,其特征在于,所述伸缩机构包括第一球头连杆、l型连杆和第二球头连杆,所述第一球头连杆的两端分别转动连接于所述摇臂和所述l型连杆,所述第二球头连杆的两端分别转动连接于所述l型连杆和所述肱骨连杆,所述l型连杆的中部转动连接于所述机身。
7.根据权利要求3所述的仿生扑翼飞行器,其特征在于,所述外翼包括依次远离所述机身的桡骨连杆和指骨件,所述桡骨连杆与所述肱骨连杆转动连接,所述指骨件与所述桡骨连杆转动连接,所述桡骨连杆和所述指骨件的转轴方向均平行于所述第二转轴方向。
8.根据权利要求7所述的仿生扑翼飞行器,其特征在于,所述仿生扑翼飞行器还包括驱动机构,所述驱动机构用于驱动所述桡骨连杆转动,以带动所述外翼进行伸缩动作。
9.根据权利要求8所述的仿生扑翼飞行器,其特征在于,所述驱动机构包括收缩舵机、拉绳、弹性件,所述收缩舵机安装于所述机身,所述拉绳的两端分别连接于所述收缩舵机的摇臂和所述桡骨连杆,所述弹性件的两端连接于所述桡骨连杆和所述肱骨连杆,且所述拉绳、所述弹性件分别位于所述肱骨连杆的两侧。
10.根据权利要求7所述的仿生扑翼飞行器,其特征在于,所述外翼还包括扭簧,所述扭簧安装于所述桡骨连杆和所述指骨件的连接处,所述扭簧的一端穿设于所述桡骨连杆的内部且所述扭簧的另一端穿设于所述指骨件的内部。
技术总结
本发明公开了一种仿生扑翼飞行器。该仿生扑翼飞行器包括机身、翼翅、扑动机构、伸缩机构、动力源。翼翅可转动地安装于机身的两侧,扑动机构安装于机身且与翼翅传动连接,扑动机构用于带动翼翅进行扑动,伸缩机构安装于机身且与翼翅传动连接,伸缩机构用于带动翼翅进行伸缩,动力源用于同时向扑动机构和伸缩机构提供动力。该仿生扑翼飞行器采用单一动力源同时驱动扑动机构、伸缩机构,使得翼翅的扑动和伸缩可以同时进行,提升了扑动和伸缩的耦合性,扑动机构和伸缩机构相互独立的结构且均直接连接动力源,两者不需要进行互相装配,降低了飞行器的结构复杂度。
技术研发人员:刘荣帅,李加东,胡益民,郭亚飞,王孟硕,刘坤,李人澍,刘昕昊
受保护的技术使用者:中国科学院苏州纳米技术与纳米仿生研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!