一种用于电推进系统的能量管理方法与流程
本申请涉及能量管理领域,具体涉及一种用于电推进系统的能量管理方法。
背景技术:
1、电推进系统是一种不依靠化学燃料的燃烧就能产生推力的装置。电推进系统主要由三部分组成:电源处理系统(ppu)、推进剂储存与供给系统、电推力器。根据电推力器中电能转化为推进剂动能方式的不同大致又可分为电热型,静电型和电磁性推力器,其有比冲高,寿命长,推力小的特点。
2、传统的化学燃料推进中,喷射出的燃气中绝大部分的能量以热能的形式存在,从微观状态看燃气分子呈现出无序的热运动状态,因此其能量的利用率不高。而电推进系统是利用电能转化为推力的机械能,也由于其精度高的特点,电推力器广泛用于各种航天设备上,适用于航天器和卫星的姿态控制,轨道保持和轨道转移等任务需求。来提供可持续的动力来源。
3、在轨卫星由于任务的需要,常常要对当前卫星的姿态进行调整,而为防止推进器故障卫星往往搭载多个电推进器组成电推进系统。在调整卫星姿态时,需要多个电推进器相互配合,但是各个电推进器应该作用的时间在使用传统的粒子群算法在寻求最优解的过程中,由于固定的学习因子参数导致算法容易陷入局部最优解,从而使得电推进系统的能量管理效率较低。
技术实现思路
1、为了解决上述技术问题,本发明提供一种用于电推进系统的能量管理方法,以解决现有的问题。
2、本发明的一种用于电推进系统的能量管理方法采用如下技术方案:
3、本发明一个实施例提供了一种用于电推进系统的能量管理方法,该方法包括以下步骤:
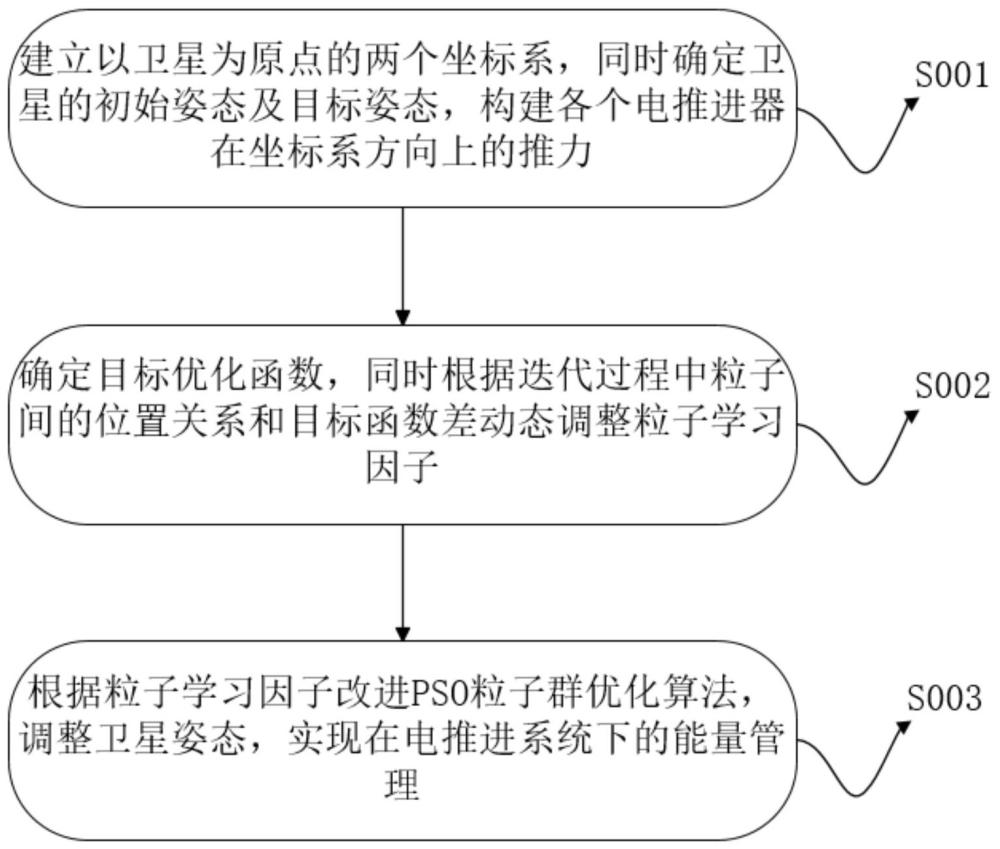
4、建立以卫星为原点的01、02坐标系;获取卫星在01坐标系下的初始姿态和目标姿态,获取各个电推进器在02坐标系各个方向上的推力;
5、将卫星的初始姿态和目标姿态的运行位置的一半作为卫星的过半姿态;设置将卫星从初始姿态调整到目标姿态的预设时间,在02坐标系下,根据各个电推进器的推力以及卫星质量得到各个电推进器在预设时间一半下的变化角度;将各个电推进器在预设时间一半下的变化角度的和值作为卫星在预设时间一半下的变化角度和;根据过半姿态、卫星在预设时间一半下的变化角度以及01、02坐标系构建目标函数;
6、对于粒子群优化算法过程中的各粒子,根据粒子、群体在各迭代次数下的目标函数值得到粒子各迭代次数下的群体综合学习因子;根据粒子迭代时的群体综合学习因子得到个体综合学习因子;
7、根据各粒子各迭代时的群体综合学习因子与个体综合学习因子改进粒子群优化算法,对电推进系统进行能量管理从而调整卫星姿态。
8、优选的,所述建立以卫星为原点的01、02坐标系,包括:
9、将卫星作为原点、卫星指向地心的射线作为x轴正半轴、地球磁极相平行且穿过卫星所在平面指向北极的射线为y轴正半轴、与xy面垂直且符合坐标系的右手准则而发出的射线作为z轴正半轴共同构成坐标系作为01坐标系;
10、将卫星作为原点、卫星运动的方向设置为x轴正半轴、卫星的正上方设置为z轴正半轴、卫星的水平向右的方向设置为y轴正半轴共同构成坐标系作为02坐标系。
11、优选的,所述根据各个电推进器的推力以及卫星质量得到各个电推进器在预设时间一半下的变化角度,包括:
12、对于各个电推进器,获取电推进器在启动时间内的推力作用下的启动变化角度,获取电推进器在关闭时间内的惯性作用下的关闭变化角度,将电推进器的启动变化角度和关闭变化角度的和值作为电推进器在预设时间一半下的变化角度。
13、优选的,所述获取电推进器在启动时间内的推力作用下的启动变化角度,包括:
14、将电推进器在启动时间内的推力与卫星质量的比值作为加速度,将启动时间的平方与所述加速度的乘积的一半作为电推进器的启动变化角度。
15、优选的,所述获取电推进器在关闭时间内的惯性作用下的关闭变化角度,包括:
16、将电推进器在启动时间内的推力与卫星质量的比值作为加速度,将所述加速度与启动时间的乘积作为匀速度,将所述匀速度与关闭时间的乘积作为电推进器的关闭变化角度。
17、优选的,所述根据过半姿态、卫星在预设时间一半下的变化角度以及01、02坐标系构建目标函数,包括:
18、将卫星在预设时间一半下的变化角度和从02坐标系映射到01坐标系,将映射后的卫星姿态与过半姿态之间的欧氏距离作为目标函数。
19、优选的,所述根据粒子、群体在各迭代次数下的目标函数值得到粒子各迭代次数下的群体综合学习因子,包括:
20、对于各迭代次数,根据粒子、群体在迭代次数下的目标函数值的差距得到粒子在迭代时的最优目标函数群体差距;根据粒子、群体在迭代次数下的目标函数值的对应位置的差距得到粒子在迭代时的最优位置群体差距;
21、将最优目标函数群体差距与最优位置群体差距的和值的相反数作为以自然常数为底数的指数函数的指数,将指数函数的计算结果与群体调节因子的乘积作为粒子在迭代时的群体综合学习因子,其中,群体调节因子为预设参数。
22、优选的,所述根据粒子、群体在迭代次数下的目标函数值的差距得到粒子在迭代时的最优目标函数群体差距,包括:
23、获取粒子、群体在迭代时的历史最优目标函数值,将粒子与群体的所述历史最优目标函数值的差值作为粒子在迭代时的最优目标函数群体差距。
24、优选的,所述根据粒子、群体在迭代次数下的目标函数值的对应位置的差距得到粒子在迭代时的最优位置群体差距,包括:
25、获取粒子、群体在迭代时的历史最优目标函数值对应的历史最优位置,将粒子与群体的所述历史最优位置的差值的欧几里得范数作为以自然常数为底数的对数函数的对数,将对数函数的计算结果作为粒子在迭代时的最优位置群体差距。
26、优选的,所述根据粒子迭代时的群体综合学习因子得到个体综合学习因子,包括:
27、将总和因子与粒子迭代时的群体综合学习因子的差值作为个体综合学习因子,其中,总和因子为预设参数,且总和因子大于群体综合学习因子。
28、本发明至少具有如下有益效果:
29、本发明通过对卫星构建坐标系,将电推进系统对于卫星运行姿态进行准确的定位;根据能量守恒定律与无摩擦运动将卫星的推进情况均等分成对称过程,基于在加速度、匀速作用下的运动计算各个电推进器的变化角度,从而构建卫星运动的目标函数,实现卫星在电推进器的作用的目标结果的设定;
30、通过在迭代过程中的群体与粒子的最优目标函数值与最优位置之间的差距,从而调整粒子群算法中的群体综合学习因子与个体综合学习因子,实现了粒子群中的各粒子在各迭代时的学习因子的自适应调整,加速了粒子群优化算法的收敛速度,对整体粒子而言更容易在参数空间中寻找最优解,不容易陷入局部最优解,从而实现最优解的卫星在电推进系统下的能量管理。
技术特征:
1.一种用于电推进系统的能量管理方法,其特征在于,该方法包括以下步骤:
2.如权利要求1所述的一种用于电推进系统的能量管理方法,其特征在于,所述建立以卫星为原点的01、02坐标系,包括:
3.如权利要求1所述的一种用于电推进系统的能量管理方法,其特征在于,所述根据各个电推进器的推力以及卫星质量得到各个电推进器在预设时间一半下的变化角度,包括:
4.如权利要求3所述的一种用于电推进系统的能量管理方法,其特征在于,所述获取电推进器在启动时间内的推力作用下的启动变化角度,包括:
5.如权利要求3所述的一种用于电推进系统的能量管理方法,其特征在于,所述获取电推进器在关闭时间内的惯性作用下的关闭变化角度,包括:
6.如权利要求1所述的一种用于电推进系统的能量管理方法,其特征在于,所述根据过半姿态、卫星在预设时间一半下的变化角度以及01、02坐标系构建目标函数,包括:
7.如权利要求1所述的一种用于电推进系统的能量管理方法,其特征在于,所述根据粒子、群体在各迭代次数下的目标函数值得到粒子各迭代次数下的群体综合学习因子,包括:
8.如权利要求7所述的一种用于电推进系统的能量管理方法,其特征在于,所述根据粒子、群体在迭代次数下的目标函数值的差距得到粒子在迭代时的最优目标函数群体差距,包括:
9.如权利要求7所述的一种用于电推进系统的能量管理方法,其特征在于,所述根据粒子、群体在迭代次数下的目标函数值的对应位置的差距得到粒子在迭代时的最优位置群体差距,包括:
10.如权利要求7所述的一种用于电推进系统的能量管理方法,其特征在于,所述根据粒子迭代时的群体综合学习因子得到个体综合学习因子,包括:
技术总结
本发明涉及能量管理领域,具体涉及一种用于电推进系统的能量管理方法,建立以卫星为原点的01、02坐标系;在02坐标系下,根据各电推进器的推力及卫星质量得到卫星在预设时间一半下的变化角度和;根据过半姿态及卫星在预设时间一半下的变化角度和构建目标函数;对于粒子群优化算法中各粒子,根据粒子、群体在各迭代次数下的目标函数值得到粒子各迭代次数下的群体综合学习因子;根据粒子迭代时的群体综合学习因子得到个体综合学习因子;根据各粒子各迭代时的群体综合学习因子与个体综合学习因子改进粒子群优化算法,对电推进系统进行能量管理从而调整卫星姿态。本发明加速了粒子群优化算法的收敛速度,对整体粒子更容易寻找最优解。
技术研发人员:靳景川,贾云涛,沈岩,王志朋,罗群
受保护的技术使用者:北京易动宇航科技有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!