一种适用于全电无人机起落架的电动前轮操纵装置的制作方法
本申请属于全电飞机起落架操纵,具体涉及一种适用于全电无人机起落架的电动前轮操纵装置。
背景技术:
1、无人机全电化是未来无人机的发展方向,近年来随着无人机技术的发展,越来越多的全电无人机机出现在我们的生活中,随着无人机机向超高速、高机动、轻量化、小型化、低成本等方向发展,传统的机械液压操纵装置由于质量重、体积大、维护成本高等缺点,已经不能满足全电飞机的需要。
技术实现思路
1、本申请的目的在于提供一种适用于全电无人机起落架的电动前轮操纵装置,全部或至少部分解决了上述技术问题。
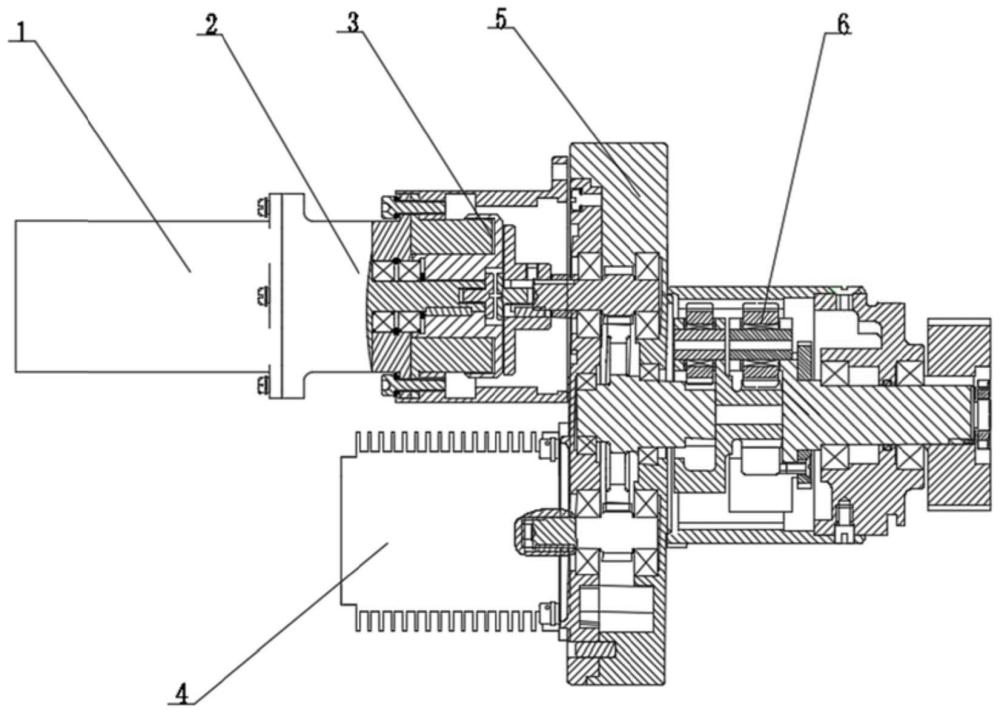
2、为了实现上述目的,本申请提供了如下技术方案,提供了一种适用于全电无人机起落架的电动前轮操纵装置,所述装置包括用于提供动力的双余度伺服电机1、与双余度伺服电机连接的第一行星减速机构2、与第一行星减速机构连接的电磁离合器3、与电磁离合器连接的直齿减速机构5、与直齿减速机构同时连接的电涡流阻尼器4以及第二行星减速机构6。
3、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述电涡流阻尼器采用内磁式分立结构。
4、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述电涡流阻尼器包括与直齿减速机构相连的转子9、位于转子上的稀土永磁体8、外定子10、与外定子相连的金属转子杯7。
5、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述外定子的磁感应强度大于1.5t,所述外定子为不锈钢材质。
6、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述电涡流阻尼器还包括用于固定转子和外定子的隔磁轴承。
7、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述外定子上设有多个散热片,散热面积s为:
8、
9、其中,d为电涡流阻尼器的直径,d为外定子的直径,l为外定子的长度。
10、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述操纵装置的减摆阻尼系数大于45n·m/s/rad。
11、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述稀土永磁体为面包型。
12、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述转子的永磁体安装孔为楔形结构。
13、本申请所提供的适用于全电无人机起落架的电动前轮操纵装置,还具有这样的特征,所述第一行星减速机构的行星轮数量为3、减速比为10.1;所述第二行星减速机构的行星轮数量为4、减速比为25;所述直齿减速机构的减速比为4。
14、有益效果
15、本申请所提供的一种适用于全电无人机起落架的电动前轮操纵装置通过对转弯功能和减摆功能的集成化设计,使的体积较液压机械操纵装置减少30%,重量减少35%,并且该操纵装置结构紧凑、体积小、重量轻、便于控制、减摆响应快、成本低、减振效果好,在维护性、环境保护、使用寿命、结构原理等方面具有优势,可满足全电无人机的减摆要求。
技术特征:
1.一种适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述装置包括用于提供动力的双余度伺服电机(1)、与双余度伺服电机(1)连接的第一行星减速机构(2)与第一行星减速机构(2)连接的电磁离合器(3)、与电磁离合器(3)连接的直齿减速机构(5)、与直齿减速机构(5)同时连接的电涡流阻尼器(4)以及第二行星减速机构(6)。
2.根据权利要求1所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述电涡流阻尼器(4)采用内磁式分立结构。
3.根据权利要求2所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述电涡流阻尼器(4)包括与直齿减速机构(5)相连的转子(9)、位于转子(9)上的稀土永磁体(8)和外定子(10)以及与外定子(10)相连的金属转子杯(7)。
4.根据权利要求3所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述外定子(10)的磁感应强度大于1.5t,所述外定子(10)为不锈钢材质。
5.根据权利要求3所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述电涡流阻尼器(4)还包括用于固定转子(9)和外定子(10)的隔磁轴承。
6.根据权利要求3所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述外定子上(10)设有多个散热片,散热面积s为:
7.根据权利要求1所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述操纵装置的减摆阻尼系数大于45n·m/s/rad。
8.根据权利要求2所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述稀土永磁体(8)为面包型。
9.根据权利要求2所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述转子(9)的永磁体安装孔为楔形结构。
10.根据权利要求1所述的适用于全电无人机起落架的电动前轮操纵装置,其特征在于,所述第一行星减速机构(2)的行星轮数量为3、减速比为10.1;所述第二行星减速机构(6)的行星轮数量为4、减速比为25;所述直齿减速机构的减速比为4。
技术总结
本申请提供了一种适用于全电无人机起落架的电动前轮操纵装置,属于全电飞机起落架操纵技术领域,所述装置包括用于提供动力的双余度伺服电机、与双余度伺服电机连接的第一行星减速机构、与第一行星减速机构连接的电磁离合器、与电磁离合器连接的直齿减速机构、与直齿减速机构同时连接的电涡流阻尼器以及第二行星减速机构。该操纵装置通过对转弯功能和减摆功能的集成化设计,使的体积较液压机械操纵装置减少30%,重量减少35%,并且该操纵装置结构紧凑、体积小、重量轻、便于控制、减摆响应快、成本低、减振效果好,在维护性、环境保护、使用寿命、结构原理等方面具有优势,可满足全电无人机的减摆要求。
技术研发人员:郭亚军,贾生鑫,于宗宝,褚立新,武斐庆
受保护的技术使用者:兰州飞行控制有限责任公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!