一种飞机双驱动舵面单作动器脱钩故障监控方法及装置与流程
本申请属于飞控,特别涉及一种飞机双驱动舵面单作动器脱钩故障监控方法及装置。
背景技术:
1、现代飞机飞控系统为了满足飞机安全性需求,一般需要在单个舵面上配置多个作动器,比较典型的是在单舵面配置2台或者3台作动器进行驱动。当单舵面的多个作动器同时工作时,会引入复杂的作动器故障模式,其中有一种故障模式就是单作动器脱钩故障,这就需要飞控系统引入一种合理的监控方法以便处理这种故障现象。
2、常规的由2台作动器驱动的舵面,一般不得不引入1台舵面位置传感器进行综合判断,在2台作动器出现位置不一致判断异常时,则增加舵面位置传感器的位置,形成3个位置的比较关系,按照多数接近原则,选择较接近舵面位置传感器反馈位置的作动器继续工作,舍弃差距较大的作动器控制使其处于旁通阻尼状态。
3、由于这种监控方法引入了舵面位置传感器,由于舵面位置传感器安装靠近两台作动器并且在同一块舵面上,因而反馈的位置较为准确,但是由于需要增加舵面位置传感器,因而增加了系统设备和安装支架重量,对于系统的减重是个不利因素。
技术实现思路
1、本申请的目的在于提供一种飞机双驱动舵面单作动器脱钩故障监控方法及装置,不需要引入新的舵面位置传感器,只需要在控制策略上进行改进,即可实现舵面单作动器脱钩故障识别。
2、本申请第一方面提供了一种飞机双驱动舵面单作动器脱钩故障监控方法,主要包括:
3、步骤s1、获取对飞机一侧的舵面进行控制的两个作动器反馈的第一作动器位置及第二作动器位置;
4、步骤s2、获取对飞机另一侧的舵面进行控制的两个作动器反馈的两个作动器位置,并通过预设的修正系数分别进行修正,以获得第三作动器位置及第四作动器位置;
5、步骤s3、对四个作动器位置进行两两比较,通过预设误差门限确定偏离其中三个作动器位置的另一个作动器位置,将其对应的作动器作为具有脱钩故障的作动器。
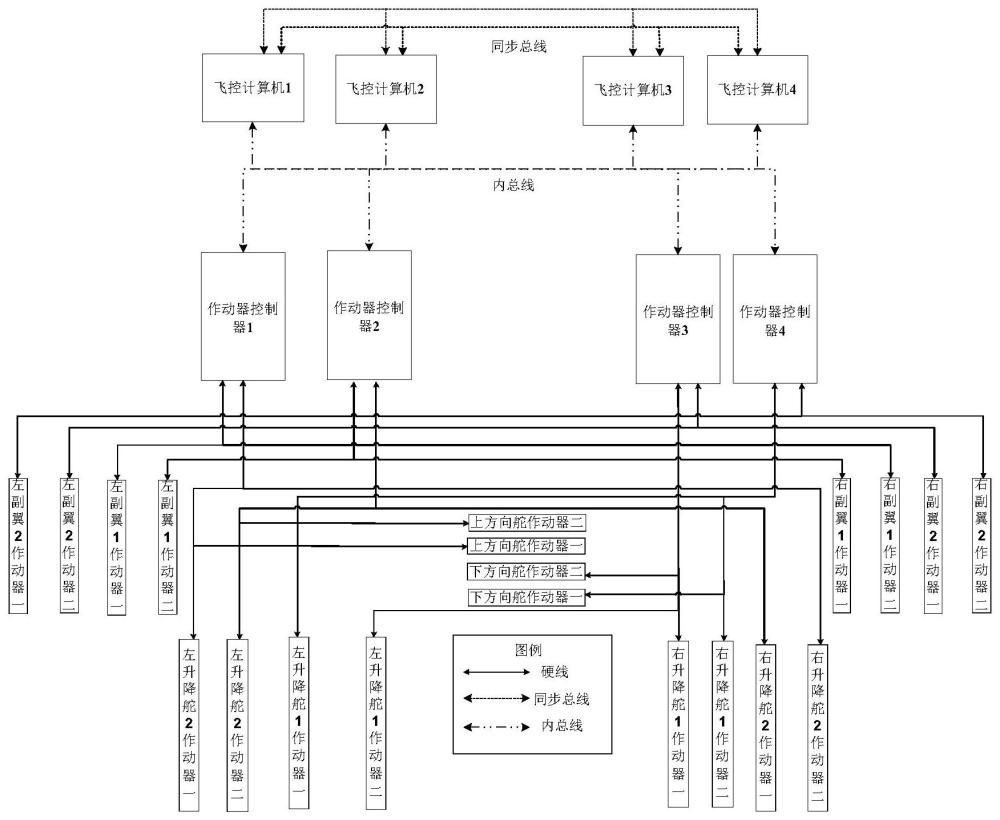
6、优选地是,所述通过作动器控制的舵面包括左右副翼,和/或左右升降舵,和/或上下方向舵。
7、优选地是,在步骤s2中,对于左右副翼,预设的修正系数为负的比例系数,对于左右升降舵或者上下方向舵,预设的修正系数为偏转误差系数。
8、优选地是,步骤s3之后进一步包括:
9、步骤s4、将具有脱钩故障的作动器置于阻尼旁通状态,控制其他三个作动器继续工作。
10、本申请第二方面提供了一种飞机双驱动舵面单作动器脱钩故障监控装置,主要包括:
11、一侧作动器位置获取模块,用于获取对飞机一侧的舵面进行控制的两个作动器反馈的第一作动器位置及第二作动器位置;
12、另一侧作动器位置获取及修正模块,用于获取对飞机另一侧的舵面进行控制的两个作动器反馈的两个作动器位置,并通过预设的修正系数分别进行修正,以获得第三作动器位置及第四作动器位置;
13、脱钩故障作动器识别模块,用于对四个作动器位置进行两两比较,通过预设误差门限确定偏离其中三个作动器位置的另一个作动器位置,将其对应的作动器作为具有脱钩故障的作动器。
14、优选地是,所述通过作动器控制的舵面包括左右副翼,和/或左右升降舵,和/或上下方向舵。
15、优选地是,对于左右副翼,预设的修正系数为负的比例系数,对于左右升降舵或者上下方向舵,预设的修正系数为偏转误差系数。
16、优选地是,该装置还包括:
17、控制模块,用于将具有脱钩故障的作动器置于阻尼旁通状态,控制其他三个作动器继续工作。
18、本申请取消了舵面位置传感器,减轻了系统的重量,相较而言,提高了系统的可靠性。
技术特征:
1.一种飞机双驱动舵面单作动器脱钩故障监控方法,其特征在于,包括:
2.如权利要求1所述的飞机双驱动舵面单作动器脱钩故障监控方法,其特征在于,所述通过作动器控制的舵面包括左右副翼,和/或左右升降舵,和/或上下方向舵。
3.如权利要求2所述的飞机双驱动舵面单作动器脱钩故障监控方法,其特征在于,在步骤s2中,对于左右副翼,预设的修正系数为负的比例系数,对于左右升降舵或者上下方向舵,预设的修正系数为偏转误差系数。
4.如权利要求1所述的飞机双驱动舵面单作动器脱钩故障监控方法,其特征在于,步骤s3之后进一步包括:
5.一种飞机双驱动舵面单作动器脱钩故障监控装置,其特征在于,包括:
6.如权利要求5所述的飞机双驱动舵面单作动器脱钩故障监控装置,其特征在于,所述通过作动器控制的舵面包括左右副翼,和/或左右升降舵,和/或上下方向舵。
7.如权利要求6所述的飞机双驱动舵面单作动器脱钩故障监控装置,其特征在于,对于左右副翼,预设的修正系数为负的比例系数,对于左右升降舵或者上下方向舵,预设的修正系数为偏转误差系数。
8.如权利要求5所述的飞机双驱动舵面单作动器脱钩故障监控装置,其特征在于,该装置还包括:
技术总结
本申请属于飞控技术领域,特别涉及一种飞机双驱动舵面单作动器脱钩故障监控方法及装置。该方法包括:步骤S1、获取对飞机一侧的舵面进行控制的两个作动器反馈的第一作动器位置及第二作动器位置;步骤S2、获取对飞机另一侧的舵面进行控制的两个作动器反馈的两个作动器位置,并通过预设的修正系数分别进行修正,以获得第三作动器位置及第四作动器位置;步骤S3、对四个作动器位置进行两两比较,通过预设误差门限确定偏离其中三个作动器位置的另一个作动器位置,将其对应的作动器作为具有脱钩故障的作动器。本申请取消了舵面位置传感器,减轻了系统的重量,提高了系统的可靠性。
技术研发人员:张新慧,任宝平,师振云,张飞,刘丽莎
受保护的技术使用者:中国航空工业集团公司西安飞机设计研究所
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!