机臂机构及无人机的制作方法
本技术涉及无人机,具体而言,涉及一种机臂机构及无人机。
背景技术:
1、现有的小型无人机主要包含机身,机臂和螺旋桨等结构,机臂设置在机身周围,用于机身与螺旋桨的连接,在实际使用中,无人机需要随时携带进行外出作业,但是,伸出在机身周围的机臂的占用空间较大,进而导致无人机不方便携带与运输;为了解决上述问题,通常是设计无人机的机臂为可折叠结构,在不使用无人机时及时进行机臂折叠,以节省空间。
2、现有技术中,存在一些无人机,可实现机臂的折叠,例如cn216546665u公开了一种无人机折叠机臂及无人机,无人机折叠机臂包括第一机臂和第二机臂,第一机臂和第二机臂中的一个与无人机机身连接,另一个与螺旋桨连接。第一机臂和第二机臂转动连接,第一机臂在和第二机臂的连接处设有连接壳,第二机臂部分容置于连接壳内,且连接壳上设有用于第二机臂相对第一机臂转动的避让口;第二机臂上套设有套筒,套筒可沿第二机臂的轴线移动且可绕第二机臂的轴线转动,套筒内设有内螺纹,连接壳的外侧壁上设有与内螺纹相匹配的外螺纹,套筒与连接壳螺纹连接实现第一机臂和第二机臂的锁定;通过螺纹,套筒从连接壳上解下,第二机臂可从避让口处相对第一机臂转动,实现折叠,减小整个无人机的占用空间;上述方案中机臂上的螺纹结构拆卸和安装的操作较为复杂,导致人工进行机臂的锁紧或折叠较慢,严重增加了无人机在使用前的准备时间,不利于在紧急救援等情况中快速使用。
技术实现思路
1、本实用新型提供了一种机臂机构及无人机,以解决现有技术中的无人机的机臂折叠调节慢,进而增加无人机在使用前的准备时间的问题。
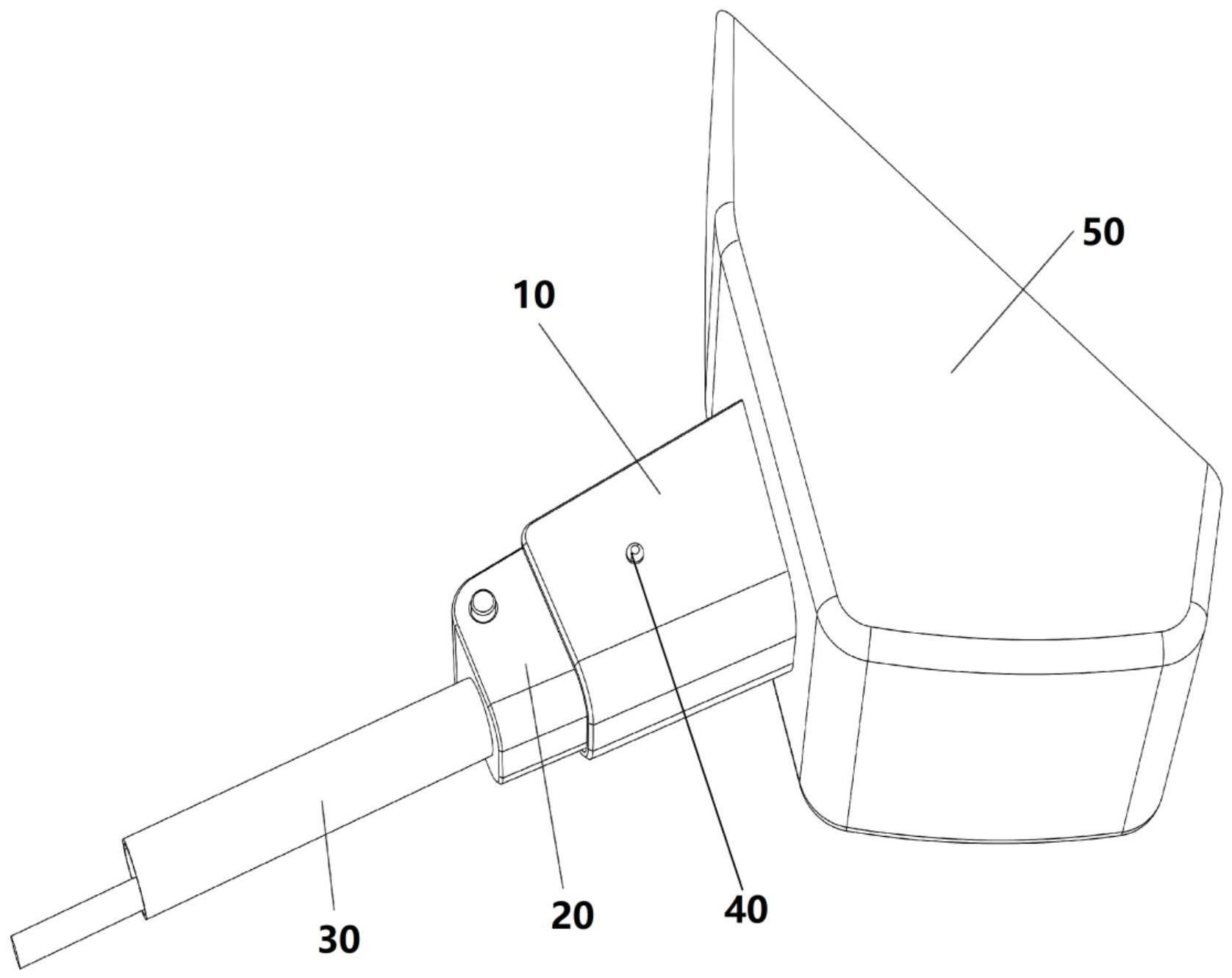
2、为了解决上述问题,根据本实用新型的一个方面,本实用新型提供了一种机臂机构,机臂机构应用在无人机上,机臂机构包括:固定座,设置在无人机的机身上,固定座上具有定位结构;折叠部,折叠部包括主体和定位件,定位件与主体弹性连接,且可活动地设置在主体上;主体的一端可活动地设置在固定座上;机臂,固定设置在主体的另一端;其中,定位结构为多个,多个定位结构间隔设置,多个定位结构包括折叠定位结构和展开定位结构,机臂机构具有折叠状态和展开状态,在折叠状态下,主体和机臂靠近固定座,定位件与折叠定位结构配合,以将主体固定在固定座上;在展开状态下,主体和机臂远离固定座,定位件与展开定位结构配合,以固定主体。
3、进一步地,折叠部还包括设置在主体上的调节件,调节件用于调节定位件的位置,以使定位件与对应的定位结构连接或分离。
4、进一步地,定位结构为通孔或凹槽,调节件包括按键和弹性件,定位件包括卡销和连接杆,连接杆通过弹性件与主体弹性连接;卡销设置在连接杆的一端,按键设置在连接杆的另一端;其中,按压按键,通过连接杆带动卡销运动,使得卡销与定位结构脱离配合。
5、进一步地,主体上间隔设有贯通的销孔和贯通的安装孔,卡销和销孔配合,按键和安装孔配合。
6、进一步地,主体内部具有安装腔,调节件的一部分和定位件的一部分均设置在安装腔内,其中,调节件与定位件连接,以调节定位件与定位结构配合的一端伸出或进入安装腔。
7、进一步地,主体的一端通过转轴结构可转动地设置在固定座上,其中,转轴结构可转动地设置在固定座上,主体的一端与转轴结构固定连接;或者,转轴结构与固定座固定连接,主体的一端与转轴结构转动连接。
8、进一步地,转轴结构包括销钉和套筒,主体内部具有安装腔,套筒设置在主体上,且位于安装腔内;折叠部具有配合腔,配合腔沿套筒的轴向贯穿套筒和主体,固定座的两边分别对应设有第一贯通孔和第二贯通孔,配合腔的两端分别与第一贯通孔和第二贯通孔连通;其中,销钉依次穿过第一贯通孔、配合腔和第二贯通孔,与配合腔转动配合,销钉的一端与固定座抵接,销钉的另一端通过紧固件与固定座限位配合。
9、进一步地,固定座具有容纳槽,定位结构的一端与容纳槽连通,主体的一端设置在容纳槽内,在折叠状态下,容纳槽容纳主体的一部分,以节省空间。
10、进一步地,多个定位结构还包括中间定位结构,机臂机构还具有中间状态,在中间状态下,机臂与固定座的夹角成设定角度,定位件与中间定位结构配合,以固定主体。
11、根据本实用新型的另一方面,提供了一种无人机,包括上述的机臂机构。
12、应用本实用新型的技术方案,本实用新型提供了一种机臂机构,机臂机构应用在无人机上,机臂机构包括:固定座,设置在无人机的机身上,固定座上具有定位结构;折叠部,折叠部包括主体和定位件,定位件与主体弹性连接,且可活动地设置在主体上;主体的一端可活动地设置在固定座上;机臂,固定设置在主体的另一端;其中,定位结构为多个,多个定位结构间隔设置,多个定位结构包括折叠定位结构和展开定位结构,机臂机构具有折叠状态和展开状态,在折叠状态下,主体和机臂靠近固定座,定位件与折叠定位结构配合,以将主体固定在固定座上;在展开状态下,主体和机臂远离固定座,定位件与展开定位结构配合,以固定主体。本实用新型通过设置定位件选择性地与多个定位结构分别配合,实现了对于机臂的折叠和展开,只需要人为调节定位件,即可快速切换机臂机构的状态,整体操作简单,可以快速地进行机臂的展开或折叠,有效减少了无人机在使用前的准备时间,适用于紧急救援等使用场景;通过定位件与定位结构的配合,保证了机臂的可靠固定,避免了机臂发生松动的问题出现。
技术特征:
1.一种机臂机构,其特征在于,所述机臂机构应用在无人机上,所述机臂机构包括:
2.根据权利要求1所述的机臂机构,其特征在于,所述折叠部(20)还包括设置在所述主体(21)上的调节件(23),所述调节件(23)用于调节所述定位件(22)的位置,以使所述定位件(22)与对应的所述定位结构(11)连接或分离。
3.根据权利要求2所述的机臂机构,其特征在于,所述定位结构(11)为通孔或凹槽,所述调节件(23)包括按键(231)和弹性件(223),所述定位件(22)包括卡销(221)和连接杆(222),所述连接杆(222)通过所述弹性件(223)与所述主体(21)弹性连接;所述卡销(221)设置在所述连接杆(222)的一端,所述按键(231)设置在所述连接杆(222)的另一端;其中,按压所述按键(231),通过所述连接杆(222)带动所述卡销(221)运动,使得所述卡销(221)与所述定位结构(11)脱离配合。
4.根据权利要求3所述的机臂机构,其特征在于,所述主体(21)上间隔设有贯通的销孔(212)和贯通的安装孔(213),所述卡销(221)和所述销孔(212)配合,所述按键(231)和所述安装孔(213)配合。
5.根据权利要求2所述的机臂机构,其特征在于,所述主体(21)内部具有安装腔(211),所述调节件(23)的一部分和所述定位件(22)的一部分均设置在所述安装腔(211)内,其中,所述调节件(23)与所述定位件(22)连接,以调节所述定位件(22)与所述定位结构(11)配合的一端伸出或进入所述安装腔(211)。
6.根据权利要求1所述的机臂机构,其特征在于,所述主体(21)的一端通过转轴结构可转动地设置在所述固定座(10)上,其中,所述转轴结构可转动地设置在所述固定座(10)上,所述主体(21)的一端与所述转轴结构固定连接;或者,所述转轴结构与所述固定座(10)固定连接,所述主体(21)的一端与所述转轴结构转动连接。
7.根据权利要求6所述的机臂机构,其特征在于,所述转轴结构包括销钉(40)和套筒(24),所述主体(21)内部具有安装腔(211),所述套筒(24)设置在所述主体(21)上,且位于所述安装腔(211)内;所述折叠部(20)具有配合腔(241),所述配合腔(241)沿所述套筒(24)的轴向贯穿所述套筒(24)和所述主体(21),所述固定座(10)的两边分别对应设有第一贯通孔(12)和第二贯通孔(13),所述配合腔(241)的两端分别与所述第一贯通孔(12)和所述第二贯通孔(13)连通;其中,所述销钉(40)依次穿过所述第一贯通孔(12)、所述配合腔(241)和所述第二贯通孔(13),与所述配合腔(241)转动配合,所述销钉(40)的一端与所述固定座(10)抵接,所述销钉(40)的另一端通过紧固件与所述固定座(10)限位配合。
8.根据权利要求1所述的机臂机构,其特征在于,所述固定座(10)具有容纳槽(14),所述定位结构(11)的一端与所述容纳槽(14)连通,所述主体(21)的一端设置在所述容纳槽(14)内,在所述折叠状态下,所述容纳槽(14)容纳所述主体(21)的一部分,以节省空间。
9.根据权利要求1所述的机臂机构,其特征在于,多个所述定位结构(11)还包括中间定位结构(11),所述机臂机构还具有中间状态,在所述中间状态下,所述机臂(30)与所述固定座(10)的夹角成设定角度,所述定位件(22)与所述中间定位结构(11)配合,以固定所述主体(21)。
10.一种无人机,其特征在于,包括权利要求1至9任一项所述的机臂机构。
技术总结
本技术提供了一种机臂机构及无人机,机臂机构包括:固定座,设置在无人机的机身上,固定座上具有定位结构;折叠部,折叠部包括主体和定位件,定位件与主体弹性连接,且可活动地设置在主体上;主体的一端可活动地设置在固定座上;机臂,固定设置在主体的另一端;其中,定位结构为多个,多个定位结构间隔设置,多个定位结构包括折叠定位结构和展开定位结构,机臂机构具有折叠状态和展开状态,在折叠状态下,主体和机臂靠近固定座,定位件与折叠定位结构配合,以将主体固定在固定座上;在展开状态下,主体和机臂远离固定座,定位件与展开定位结构配合,以固定主体。本申请实现了对于机臂的快速折叠和快速展开,有效减少了无人机的准备时间。
技术研发人员:李示明,陈力,方金亮
受保护的技术使用者:浙江华飞智能科技有限公司
技术研发日:20230217
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!