一种无人机目标跟踪系统的制作方法
本技术涉及目标跟踪领域,尤其涉及一种无人机目标跟踪系统。
背景技术:
1、无人机是一种以无线电遥控或者自身程序控制为主的非载人飞行器,其具有体积小、造价低、使用方便等优点,广泛用于空中侦察、监视、通信、反潜、电子干扰等领域。目前,无人机目标跟踪多采用拍摄视频图像,并人为进行跟踪拍摄,实现目标锁定。
2、授权公开号“cn208110390u”记载了“一种无人机目标跟踪系统,包括机架本体,以机架本体中心呈轴对称和/或中心对称分布的数个飞翼,设置在机架本体内的stm32l0中央处理芯片,分别与中央处理芯片连接的存储器、射频收发器、矢量角度仪、高度传感器、加速度计、陀螺仪、图像处理模块、飞行驱动器,与射频发生器连接的无线遥控器,设置在飞翼上且与飞行驱动器连接的直流马达,与直流马达连接的旋转桨叶,与图像处理模块连接的视频编码器,与视频编码器连接、且设置在机架本体底部的红外摄像头,以及设置在红外摄像头与机架本体之间、且与中央处理芯片连接、用于驱动该红外摄像头转动的伺服电机。通过上述方案,本实用新型具有结构简单、跟踪可靠、准确定位等优点”。
3、上述专利具有结构简单、跟踪可靠、准确定位等优点,但上述专利在进行图像采集时,只能定向采集而导致采集的面积小,使得采集的图像存在局限性。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的无人机目标跟踪系统在进行图像采集时,只能定向采集而导致采集的面积小,使得采集的图像存在局限性的问题,而提供了一种无人机目标跟踪系统。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种无人机目标跟踪系统,其特征在于,包括:
4、无人机;
5、红外摄像头,所述红外摄像头设有两个,两个所述红外摄像头分别通过两个第一转轴连接设于所述无人机的底部;
6、调节机构,设于所述无人机内部,所述调节机构与两个所述第一转轴连接,以实现对两个所述红外摄像头方向的调节;
7、数据控制机构,设于所述无人机和所述调节机构上;
8、蓄电池,设于所述调节机构上。
9、进一步地,两个所述红外摄像头在所述无人机底部对称设置。
10、进一步地,所述调节机构包括驱动部件和传动部件,所述驱动部件设置于所述无人机内部,所述传动部件设置于所述驱动部件上。
11、进一步地,所述驱动部件包括安装板、正反转电机和第二转轴,所述安装板固定连接于所述无人机的侧壁之间,所述正反转电机设置于所述安装板上,且所述正反转电机的输出端贯穿所述安装板并延伸至所述安装板的下侧,所述第二转轴其中一端连接于所述无人机的下内壁,另一端与所述正反转电机的输出端固定连接,所述正反转电机与所述蓄电池电性连接。
12、进一步地,所述传动部件包括限位套、横板和推杆,所述限位套设置有两个,每个所述限位套均固定连接于每个所述第一转轴的上端,两个所述限位套对称设置,所述横板固定连接于所述第二转轴的圆周表面上,所述推杆设置有两个,两个所述推杆均固定连接于所述横板的下端,且两个所述推杆对称设置,每个所述推杆均活动插接于每个所述限位套上。
13、进一步地,所述数据控制机构包括数据传输器和信息处理器,所述数据传输器固定连接于所述无人机的顶部,与所述信息处理器电性连接,所述信息处理器固定连接于所述安装板的上端,且所述信息处理器均与两个所述红外摄像头电性连接,所述信息处理器与所述蓄电池电性连接。
14、进一步地,所述蓄电池固定连接于所述安装板的上端,所述蓄电池和所述信息处理器分别位于所述正反转电机的两侧。
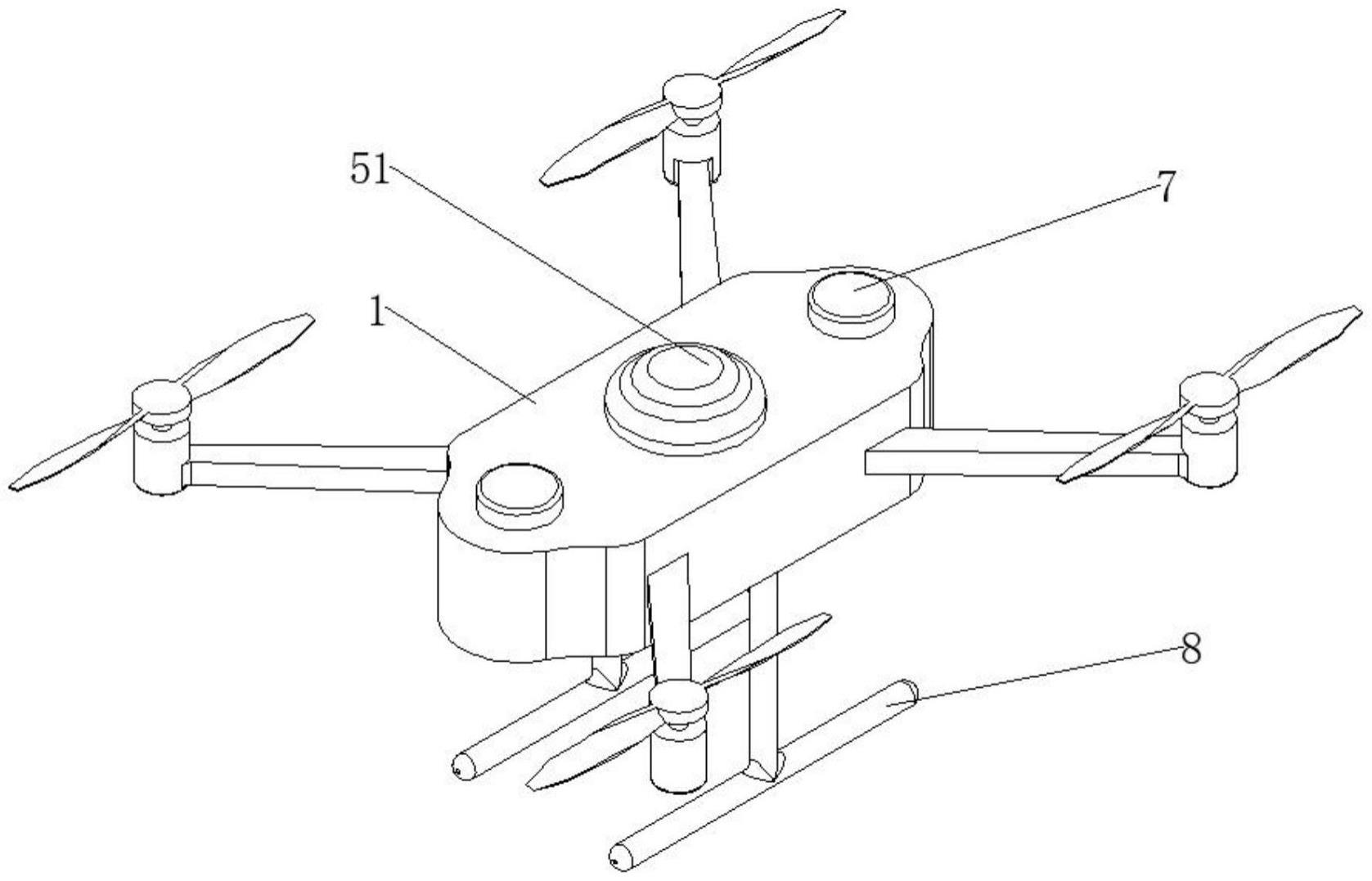
15、进一步地,所述无人机的上端固定连接有两个定位灯,两个所述定位灯均与所述蓄电池电性连接。
16、进一步地,两个所述定位灯分别位于所述数据传输器两侧,以所述数据传输器为中点对称设置。
17、进一步地,所述无人机的下端固定连接有两个t型支撑架,两个所述t型支撑架对称设置。
18、与现有技术相比,本实用新型的有益效果是:
19、1、本方案中,通过正反转电机的输出端转动可以实现第二转轴转动,通过第二转轴转动可以实现横板转动,通过横板转动可以实现推杆做圆周运动,通过推杆移动可以推动限位套局部往复转动,通过限位套局部往复转动可以实现红外摄像头局部往复转动,通过两个红外摄像头局部往复转动可以提高图像的采集的面积。
20、2、本方案中,通过两个定位灯的设置,使得无人机在夜间飞行时可以限制位置,通过数据传输器的设置可以对拍摄的图像进行传输,通过两个t型支撑架的设置可以支撑无人机。
技术特征:
1.一种无人机目标跟踪系统,其特征在于,包括:
2.根据权利要求1所述的无人机目标跟踪系统,其特征在于:两个所述红外摄像头在所述无人机底部对称设置。
3.根据权利要求1所述的无人机目标跟踪系统,其特征在于:所述调节机构包括驱动部件和传动部件,所述驱动部件设置于所述无人机内部,所述传动部件设置于所述驱动部件上。
4.根据权利要求3所述的无人机目标跟踪系统,其特征在于:所述驱动部件包括安装板、正反转电机和第二转轴,所述安装板固定连接于所述无人机的侧壁之间,所述正反转电机设置于所述安装板上,且所述正反转电机的输出端贯穿所述安装板并延伸至所述安装板的下侧,所述第二转轴其中一端连接于所述无人机的下内壁,另一端与所述正反转电机的输出端固定连接,所述正反转电机与所述蓄电池电性连接。
5.根据权利要求4所述的无人机目标跟踪系统,其特征在于:所述传动部件包括限位套、横板和推杆,所述限位套设置有两个,每个所述限位套均固定连接于每个所述第一转轴的上端,两个所述限位套对称设置,所述横板固定连接于所述第二转轴的圆周表面上,所述推杆设置有两个,两个所述推杆均固定连接于所述横板的下端,且两个所述推杆对称设置,每个所述推杆均活动插接于每个所述限位套上。
6.根据权利要求4所述的无人机目标跟踪系统,其特征在于:所述数据控制机构包括数据传输器和信息处理器,所述数据传输器固定连接于所述无人机的顶部,与所述信息处理器电性连接,所述信息处理器固定连接于所述安装板的上端,且所述信息处理器均与两个所述红外摄像头电性连接,所述信息处理器与所述蓄电池电性连接。
7.根据权利要求6所述的无人机目标跟踪系统,其特征在于:所述蓄电池固定连接于所述安装板的上端,所述蓄电池和所述信息处理器分别位于所述正反转电机的两侧。
8.根据权利要求7所述的无人机目标跟踪系统,其特征在于:所述无人机的上端固定连接有两个定位灯,两个所述定位灯均与所述蓄电池电性连接。
9.根据权利要求8所述的无人机目标跟踪系统,其特征在于:两个所述定位灯分别位于所述数据传输器两侧,以所述数据传输器为中点对称设置。
10.根据权利要求1所述的无人机目标跟踪系统,其特征在于:所述无人机的下端固定连接有两个t型支撑架,两个所述t型支撑架对称设置。
技术总结
本技术涉及目标跟踪领域,尤其涉及一种无人机目标跟踪系统,包括:无人机,红外摄像头,所述红外摄像头设有两个,两个所述红外摄像头分别通过两个第一转轴连接设于所述无人机的底部;调节机构,设于所述无人机内部,所述调节机构与两个所述第一转轴连接,以实现对两个所述红外摄像头方向的调节;数据控制机构,设于无人机和调节机构上;蓄电池,设于调节机构上。本技术通过限位套局部往复转动可以实现红外摄像头局部往复转动,通过两个红外摄像头局部往复转动可以提高图像的采集的面积,可以解决现有技术中的无人机目标跟踪系统在进行图像采集时,只能定向采集而导致采集的面积小,使得采集的图像存在局限性的问题。
技术研发人员:王亮,蒋向前,王迪,涂志均,张建库
受保护的技术使用者:上海宇航系统工程研究所
技术研发日:20230306
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!