一种抗干扰无人机
本技术涉及无人机,尤其涉及一种抗干扰无人机。
背景技术:
1、在现有技术中,无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,现有技术中无人机在进行工作时,容易与天上的鸟群产生接触,此时缺少有效的控制机构增加无人机的抗干扰性。
2、但是上述技术方案由于无人机在进行工作时,容易与天上的鸟群产生接触,因此还存在无人机与鸟群发生冲撞时,无人机容易造成损坏,从而干扰到无人机工作的问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在无人机与鸟群发生冲撞时,无人机容易造成损坏,从而干扰到无人机工作的缺点,而提出的一种抗干扰无人机。
2、为了实现上述目的,本实用新型采用了如下技术方案:
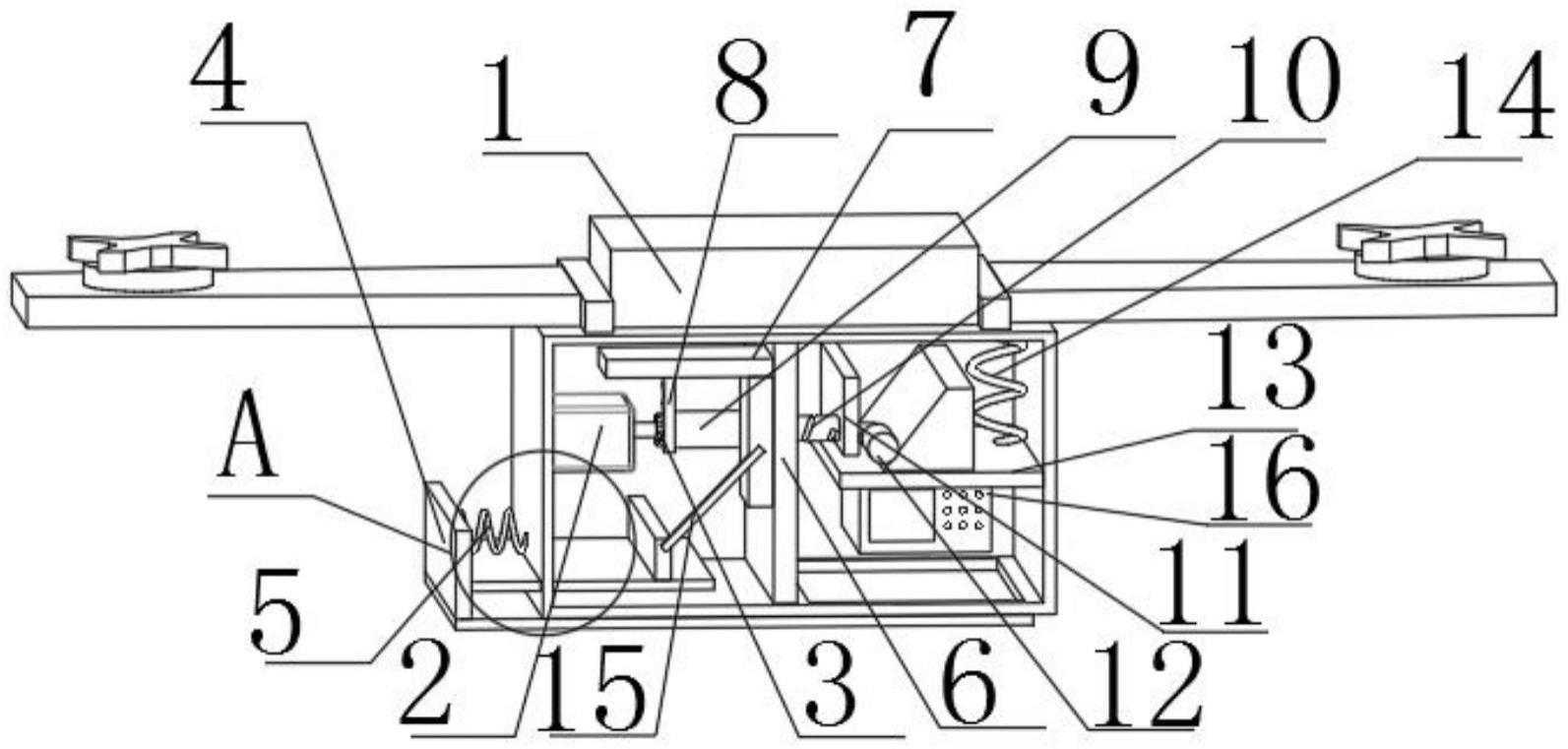
3、一种抗干扰无人机,包括主体,所述主体底部滑动连接有活动板,且活动板的右侧延伸至主体内,所述主体的右侧内壁滑动连接有支撑板,且支撑板的底部固定连接有驱鸟器,所述主体的左侧内壁固定连接有电机,且电机输出轴的一端固定连接有齿轮,所述主体的底部内壁固定连接有空心板,所述主体内设有控制机构。
4、优选的,所述控制机构包括螺纹管、螺纹柱、滑动板、辅助板、齿条与推板,所述螺纹管固定连接在齿轮的右侧,所述螺纹柱螺纹连接在螺纹管内,所述滑动板滑动连接在主体的后侧内壁,且滑动板的左侧与螺纹柱的右侧固定连接,所述辅助板滑动连接在空心板的左侧,所述齿条固定连接在辅助板的底部,且齿条与齿轮相啮合,所述推板转动连接在辅助板的前侧,且推板的底部与活动板的顶部转动连接。
5、进一步的,控制机构通过控制螺纹管进行转动,螺纹管可以同步控制螺纹柱进行移动,此时螺纹柱可以推动滑动板进行移动,同时随着齿条的移动,齿条可以控制辅助板进行移动,进而控制推板进行移动,实现推动活动板进行移动的效果。
6、优选的,所述支撑板的顶部固定连接有斜面板,滑动板的前侧转动连接有转轮,且转轮与斜面板的斜面活动接触。
7、进一步的,当转轮与斜面板的斜面进行接触时,随着转轮的移动,转轮可以控制斜面板进行移动,此时斜面板可以同步控制支撑板进行下降。
8、优选的,所述活动板的右侧固定连接有一号弹簧,且一号弹簧的一端与主体的左侧固定连接,所述支撑板的顶部固定连接有二号弹簧,且二号弹簧的一端与主体的顶部内壁固定连接。
9、进一步的,通过设置一号弹簧,一号弹簧通过自身弹力可以拉动活动板进行回位,通过设置二号弹簧,二号弹簧通过自身弹力可以拉动支撑板进行回位。
10、优选的,所述主体的底部设有延伸孔,且驱鸟器与延伸孔活动连接。
11、进一步的,通过设置延伸孔,延伸孔起到辅助驱鸟器延伸至主体外的效果。
12、优选的,所述主体的顶部对称转动连接有两个电动螺旋桨。
13、进一步的,通过设置电动螺旋桨,当电动螺旋桨进行工作时,可以控制整个装置起飞。
14、有益效果:
15、1、在主体进行工作时,通过控制电机的输出轴进行转动,电机的输出轴控制齿轮进行转动,当齿轮进行转动时,齿轮控制齿条进行下降,随着齿条的移动,齿条同步控制辅助板进行下降,此时辅助板可以拖动推板进行移动,当推板进行移动时,推板推动活动板进行移动;
16、2、随着齿轮的转动,齿轮控制螺纹管进行转动,当螺纹管进行转动时,螺纹管通过螺纹控制螺纹柱向右进行移动,此时螺纹柱推动滑动板进行移动,此时滑动板同步控制转轮进行移动;
17、3、随着转轮的移动,转轮与斜面板的斜面进行接触,推动斜面板进行下降,同时斜面板同步控制支撑板进行下降,当支撑板进行下降时,支撑板控制驱鸟器延伸至主体外,此时启动驱鸟器可以防止主体工作时受到鸟群的干扰,同时在驱鸟器停止使用时处于主体内,可以对驱鸟器进行有效的保护。
18、本实用新型中:在主体进行工作时,通过控制电机的输出轴进行转动,电机的输出轴可以控制齿轮进行转动,此时通过控制齿轮的转动可以辅助活动板进行移动,同时方便控制支撑板带动驱鸟器延伸至主体外,止主体工作时受到鸟群的干扰,同时在驱鸟器停止使用时处于主体内,可以对驱鸟器进行有效的保护。
技术特征:
1.一种抗干扰无人机,包括主体(1),其特征在于,所述主体(1)底部滑动连接有活动板(4),且活动板(4)的右侧延伸至主体(1)内,所述主体(1)的右侧内壁滑动连接有支撑板(13),且支撑板(13)的底部固定连接有驱鸟器(16),所述主体(1)的左侧内壁固定连接有电机(2),且电机(2)输出轴的一端固定连接有齿轮(3),所述主体(1)的底部内壁固定连接有空心板(6),所述主体(1)内设有控制机构。
2.根据权利要求1所述的一种抗干扰无人机,其特征在于,所述控制机构包括螺纹管(9)、螺纹柱(10)、滑动板(11)、辅助板(7)、齿条(8)与推板(15),所述螺纹管(9)固定连接在齿轮(3)的右侧,所述螺纹柱(10)螺纹连接在螺纹管(9)内,所述滑动板(11)滑动连接在主体(1)的后侧内壁,且滑动板(11)的左侧与螺纹柱(10)的右侧固定连接,所述辅助板(7)滑动连接在空心板(6)的左侧,所述齿条(8)固定连接在辅助板(7)的底部,且齿条(8)与齿轮(3)相啮合,所述推板(15)转动连接在辅助板(7)的前侧,且推板(15)的底部与活动板(4)的顶部转动连接。
3.根据权利要求2所述的一种抗干扰无人机,其特征在于,所述支撑板(13)的顶部固定连接有斜面板,滑动板(11)的前侧转动连接有转轮(12),且转轮(12)与斜面板的斜面活动接触。
4.根据权利要求1所述的一种抗干扰无人机,其特征在于,所述活动板(4)的右侧固定连接有一号弹簧(5),且一号弹簧(5)的一端与主体(1)的左侧固定连接,所述支撑板(13)的顶部固定连接有二号弹簧(14),且二号弹簧(14)的一端与主体(1)的顶部内壁固定连接。
5.根据权利要求1所述的一种抗干扰无人机,其特征在于,所述主体(1)的底部设有延伸孔,且驱鸟器(16)与延伸孔活动连接。
6.根据权利要求1所述的一种抗干扰无人机,其特征在于,所述主体(1)的顶部对称转动连接有两个电动螺旋桨。
技术总结
本技术属于无人机技术领域,尤其是一种抗干扰无人机,针对现有的技术中存在无人机与鸟群发生冲撞时,无人机容易造成损坏,从而干扰到无人机工作的问题,现提出如下方案,其包括主体,所述主体底部滑动连接有活动板,且活动板的右侧延伸至主体内,所述主体的右侧内壁滑动连接有支撑板,且支撑板的底部固定连接有驱鸟器,有益效果:在主体进行工作时,通过控制电机的输出轴进行转动,电机的输出轴可以控制齿轮进行转动,此时通过控制齿轮的转动可以辅助活动板进行移动,同时方便控制支撑板带动驱鸟器延伸至主体外,止主体工作时受到鸟群的干扰,同时在驱鸟器停止使用时处于主体内,可以对驱鸟器进行有效的保护。
技术研发人员:席建祥,王乐,李俊龙,罗少杰,杨鸿宾,卢瑞涛,王成,高久安,樊红东,杨小冈,蔡光斌
受保护的技术使用者:中国人民解放军火箭军工程大学
技术研发日:20230308
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!