一种监测无人机的制作方法
本技术涉及无人机,具体为一种监测无人机。
背景技术:
1、无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶的飞机相比,无人机往往更适合那些太愚钝,肮脏或危险的任务,无人机按应用领域,可分为军用与民用:军用方面,无人机分为侦察机和靶机;民用方面,无人机+行业应用,是无人机真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
2、现有技术中,在一些环境监测领域内也开始使用无人机来进行样本采集,比如在水生监测领域内就需要无人机前往一些无法到达的水域进行水样采集,在进行水样采集的时候最怕的就是无人机进水问题,需要在不影响采样的情况下保证无人机远离水源,基于这个问题,我们提出了一种监测无人机。
技术实现思路
1、本实用新型的目的在于提供一种监测无人机,以解决上述背景技术提出的现有技术中存在的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种监测无人机,包括无人机主体,所述无人机主体的下端处固定连接有两个支腿,所述无人机主体的下端处固定连接有两个支架,两个所述支架之间共同设置有监测设备主体,所述监测设备主体的上端与无人机主体之间通过两个电动伸缩杆相互连接,两个所述支架之间相对的侧壁处均贯穿设置有滑槽,两个所述滑槽内均设置有滑座,两个所述滑座均通过滑动装置与滑槽相互连接,两个所述滑座与对应的监测设备主体之间均通过连接装置相互连接。
4、优选地,所述滑动装置包括固定连接在滑槽内壁上的滑杆,对应位置处的所述滑座的侧壁处贯穿设置有滑孔,所述滑杆贯穿滑孔并在其内滑动。
5、优选地,所述连接装置包括转动连接在滑座侧壁上的连接杆,所述连接杆的下端处贯穿设置有连接槽,所述连接槽内滑动连接有伸长杆,对应位置处的所述监测设备主体的侧壁上转动连接有固定杆,所述伸长杆的另一端固定连接在固定杆的端口处,所述伸长杆上位于连接槽内的一端与连接槽的内壁之间通过弹簧弹性连接。
6、优选地,两个所述支架均设置在两个支腿的内侧且其长度短于支腿。
7、优选地,两个所述伸长杆上位于连接槽内的侧壁上固定连接有防脱环,对应的连接槽的内壁上固定连接有限位器,所述防脱环的位置与限位器的位置相对应。
8、优选地,两个所述滑座与对应的滑杆之间存在阻尼。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型中,通过设置滑动装置与连接装置相互配合,在用于水源采样的无人机上设置的监测设备主体是通过电动伸缩杆来带动升降的,当无人机悬停在水面上时,可以通过电动伸缩杆带着监测设备主体主动降落,可以避免无人机升位太低而碰触水面,同时两侧的导向以及连接杆可以保证监测设备主体升降过程中的平稳性,通过两侧的弹簧、防脱环以及连接杆、固定杆配合,两侧的支架在不突出于支腿的情况下保证监测设备可以往下运行距离更长。
技术特征:
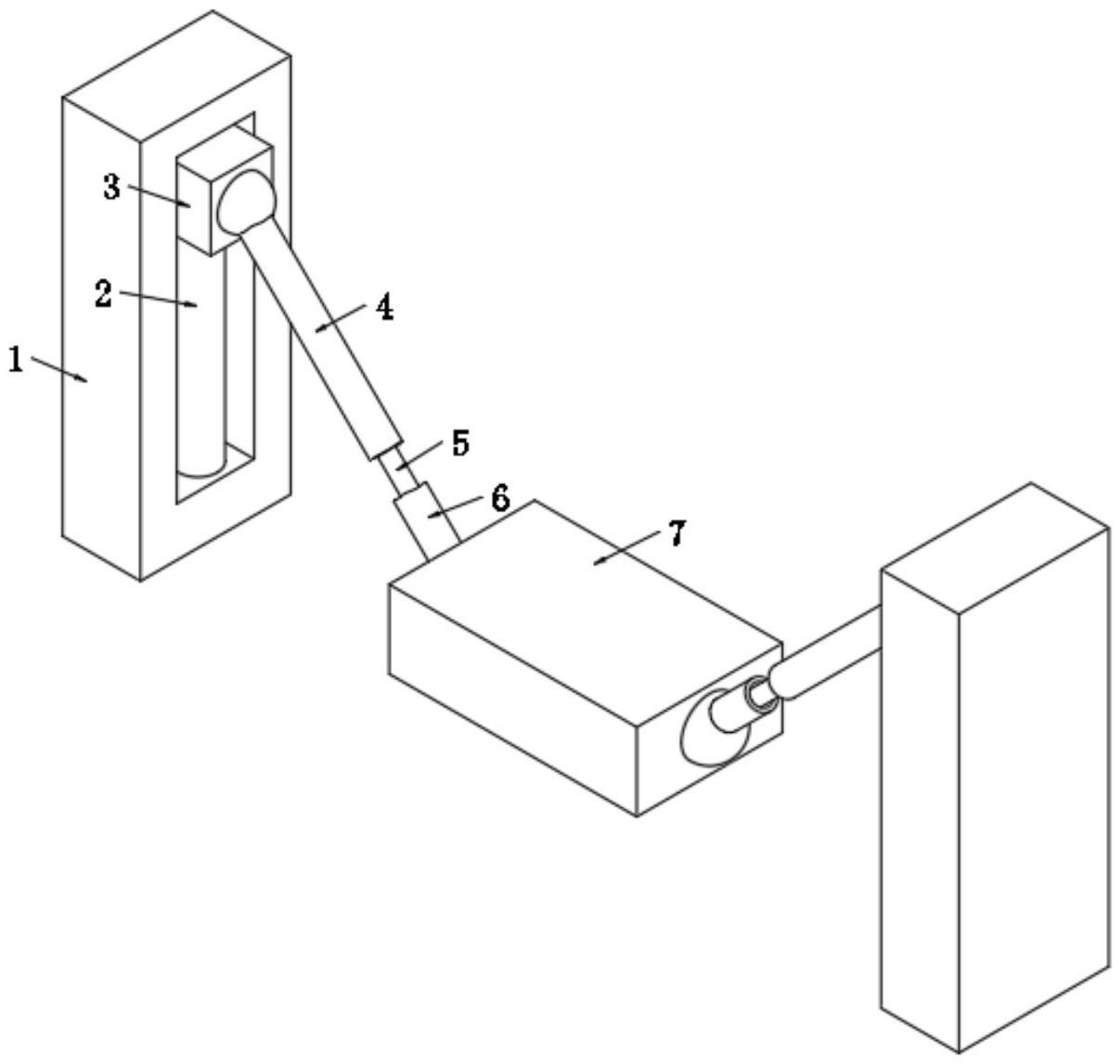
1.一种监测无人机,包括无人机主体(8),其特征在于,所述无人机主体(8)的下端处固定连接有两个支腿(9),所述无人机主体(8)的下端处固定连接有两个支架(1),两个所述支架(1)之间共同设置有监测设备主体(7),所述监测设备主体(7)的上端与无人机主体(8)之间通过两个电动伸缩杆(13)相互连接,两个所述支架(1)之间相对的侧壁处均贯穿设置有滑槽,两个所述滑槽内均设置有滑座(3),两个所述滑座(3)均通过滑动装置与滑槽相互连接,两个所述滑座(3)与对应的监测设备主体(7)之间均通过连接装置相互连接。
2.根据权利要求1所述的一种监测无人机,其特征在于,所述滑动装置包括固定连接在滑槽内壁上的滑杆(2),对应位置处的所述滑座(3)的侧壁处贯穿设置有滑孔,所述滑杆(2)贯穿滑孔并在其内滑动。
3.根据权利要求1所述的一种监测无人机,其特征在于,所述连接装置包括转动连接在滑座(3)侧壁上的连接杆(4),所述连接杆(4)的下端处贯穿设置有连接槽,所述连接槽内滑动连接有伸长杆(5),对应位置处的所述监测设备主体(7)的侧壁上转动连接有固定杆(6),所述伸长杆(5)的另一端固定连接在固定杆(6)的端口处,所述伸长杆(5)上位于连接槽内的一端与连接槽的内壁之间通过弹簧(10)弹性连接。
4.根据权利要求1所述的一种监测无人机,其特征在于,两个所述支架(1)均设置在两个支腿(9)的内侧且其长度短于支腿(9)。
5.根据权利要求3所述的一种监测无人机,其特征在于,两个所述伸长杆(5)上位于连接槽内的侧壁上固定连接有防脱环(11),对应的连接槽的内壁上固定连接有限位器(12),所述防脱环(11)的位置与限位器(12)的位置相对应。
6.根据权利要求1所述的一种监测无人机,其特征在于,两个所述滑座(3)与对应的滑杆(2)之间存在阻尼。
技术总结
本技术公开了一种监测无人机无人机主体,所述无人机主体的下端处固定连接有两个支腿,所述无人机主体的下端处固定连接有两个支架,两个所述支架之间共同设置有监测设备主体,所述监测设备主体的上端与无人机主体之间通过两个电动伸缩杆相互连接,两个所述支架之间相对的侧壁处均贯穿设置有滑槽,两个所述滑槽内均设置有滑座,两个所述滑座均通过滑动装置与滑槽相互连接,两个所述滑座与对应的监测设备主体之间均通过连接装置相互连接。本技术结构设计合理,具有可以保证无人机远离水源,保证无人机的安全性,可以下探更长距离的好处。
技术研发人员:郑志舟,高卫猛,吴国锋,刘帅,刘静艳,宋雪燕
受保护的技术使用者:沧州燕赵环境监测技术服务有限公司
技术研发日:20230314
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!