一种无人机巡检柔性驱动云台的制作方法
本技术涉及无人机、自动控制和传感器,具体为一种无人机巡检柔性驱动云台。
背景技术:
1、在输电系统的电力线巡检和电网建设转序验收等工作领域中,为提高巡检和验收的高效、安全和无人化,无人机巡检模式的应用越来越广泛。在巡检和验收过程中,最常用的模式就是无人机搭载摄像头,通过远程图像传输或视觉识别等方式对电力线设施进行检验。而摄像头的视角范围有限,若无人机只搭载单个摄像头则视觉检测的角度方位范围有限,导致无人机飞行线路收到限制,当电力线设施所在地形复杂导致设施周围某区域空间有限时,无人机无法有效飞行拍摄;搭载多个摄像头则会导致成本上升。所以摄像头搭载在云台上,使得摄像头能够偏转一定的角度进行拍摄是最佳的解决方法。
2、而传统的无人机云台一般有2-3个自由度的控制角度,每个自由度需要一个电机进行角度的控制,导致云台的重量较大,增加了无人机的负荷,会使得无人机的载重规格上升或者飞行性能下降。而且传统的无人机云台由于其结构特性和安装位置限制,导致云台摄像头的拍摄范围无法达到全空间无死角拍摄,拍摄角度依然有限制。因此需要研究出一种轻量的、灵活的、拍摄角度更广的无人机巡检云台。
技术实现思路
1、为了克服上述现有技术存在的缺陷,本实用新型的目的在于提供一种无人机巡检柔性驱动云台,以解决传统无人机云台重量较大、拍摄角度有限、灵活性和柔性较差的技术问题。
2、本实用新型是通过以下技术方案来实现:
3、一种无人机巡检柔性驱动云台,包括电器盒、柔性驱动机构和探头,所述柔性驱动机构呈管状结构,柔性驱动机构的一端装配在电器盒上,另一端装配探头;所述电器盒内设有驱动器、红外测距传感器和数据存储器;所述探管内设有可见光成像系统、红外光接收镜头和红外光发射镜头,所述可见光成像系统的输出端沿着柔性驱动机构连接至数据存储器的输入端,所述红外光接收镜头和红外光发射镜头的输出端分别沿着柔性驱动机构连接至红外测距传感器的输入端,所述红外测距传感器的输出端连接至数据存储器的输入端,数据存储器的输出端连接至终端;所述柔性驱动机构沿着管体周向分布若干柔性定向驱动单元,若干柔性定向驱动单元的驱动端连接至驱动器。
4、优选的,柔性驱动机构内装有面阵光纤传像束,其中面阵光纤传像束的一端连接在可见光成像系统上,另一端连接至数据存储器上。
5、进一步的,柔性驱动机构内设有耦合物镜和面阵电荷耦合元件,所述面阵光纤传像束的一端依次通过耦合物镜和面阵电荷耦合元件连接至数据存储器上。
6、进一步的,若干柔性定向驱动单元在柔性驱动机构内,一侧与面阵光纤传像束贴紧,另一侧与柔性驱动机构的内壁贴紧。
7、优选的,若干柔性定向驱动单元的长度均与柔性驱动机构的管体长度相等。
8、优选的,所述柔性驱动机构内设有红外光输出传像光纤,所述红外光输出传像光纤的一端连接至红外光发射镜头,另一端连接红外测距传感器。
9、优选的,所述柔性驱动机构内设有红外光输入传像光纤,所述红外光输入传像光纤的一端连接红外测距传感器另一端连接红外光接收镜头。
10、优选的,所述柔性驱动机构的外层包裹弹性支撑层,用于在柔性定向驱动单元未发生形变驱动时,柔性驱动机构快速恢复到原来的形状角度。
11、进一步的,弹性支撑层外还包裹绝缘表皮,用于避免外部环境的物理量信号干扰。
12、优选的,柔性定向驱动单元的材料为柔性压电材料、高分子液晶材料、尼龙丝材料或天然橡胶材料。
13、与现有技术相比,本实用新型具有以下有益的技术效果:
14、本实用新型提供了一种无人机巡检柔性驱动云台,在电器盒与探头之间设置柔性驱动机构,柔性驱动机构代替了传统无人机云台的多个电机驱动的串联结构,有效降低了无人机云台的重量,提高了云台和摄像头的柔韧性和抗击打性。电器盒内设有驱动器、红外测距传感器和数据存储器,都是由芯片组和对应的主板组成,重量同样较轻,进一步减小无人机所需要负荷的重量;柔性驱动机构内沿着管体周向分布若干柔性定向驱动单元,若干柔性定向驱动单元通过驱动器的驱动可实现对柔性驱动机构进行自由度的旋转,提高了无人机巡检柔性驱动云台的灵活性,探头为“长触手”形态,通过若干柔性定向驱动单元驱动自由弯曲调整前端拍摄角度,必要时可以通过调整伸出安装面,对无人机对侧的图像场景进行拍摄,实现全空间无死角的拍摄,实现了比传统云台摄像头更广的拍摄角度和更强的灵活性。
15、进一步的,柔性定向驱动单元在柔性驱动机构内,一侧与面阵光纤传像束贴紧,另一侧与柔性驱动机构的内壁贴紧,有效的通过柔性定向驱动单元对面阵光纤传像束在柔性驱动机构进行紧固,避免面阵光纤传像束松弛,影响数据接收。
16、进一步的,若干柔性定向驱动单元的长度均与柔性驱动机构的管体长度相等,使得柔性驱动机构能够整体通过若干柔性定向驱动单元实现自由弯曲,提高了摄像头更广的拍摄角度和更强的灵活性。
17、进一步的,柔性驱动机构的外层包裹弹性支撑层,用于在柔性定向驱动单元未发生形变驱动时,柔性驱动机构快速恢复到原来的形状角度,提高了柔性驱动机构的灵活性。
18、进一步的,弹性支撑层外还包裹绝缘表皮,有效避免外部环境的物理量信号干扰,提高了信号传输。
技术特征:
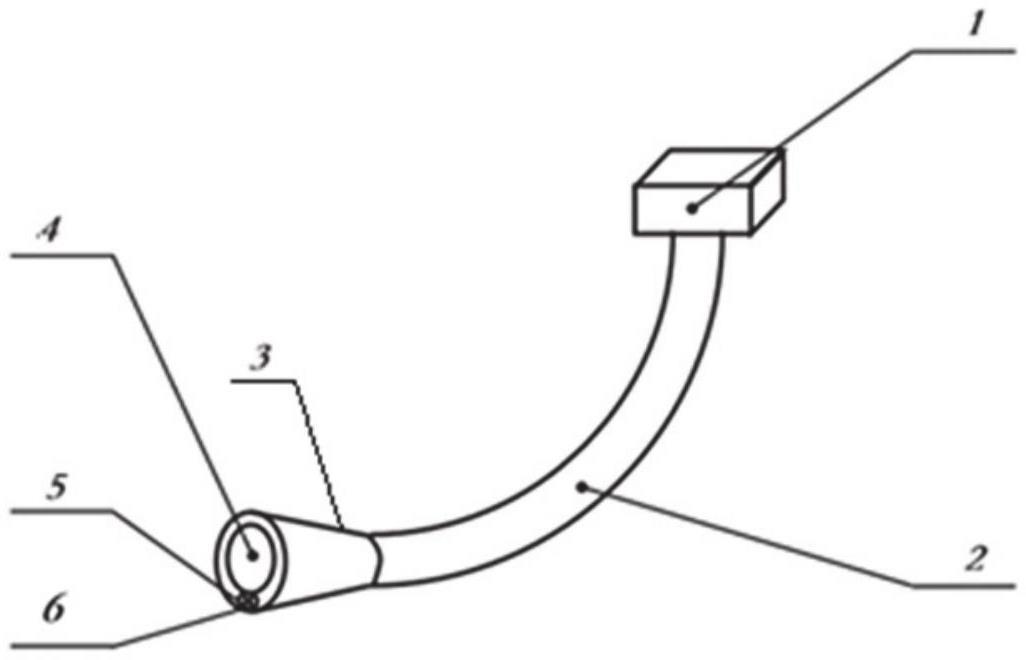
1.一种无人机巡检柔性驱动云台,其特征在于,包括电器盒(1)、柔性驱动机构(2)和探头(3),所述柔性驱动机构(2)呈管状结构,柔性驱动机构(2)的一端装配在电器盒(1)上,另一端装配探头(3);所述电器盒(1)内设有驱动器(101)、红外测距传感器(102)和数据存储器(103);所述探头(3)内设有可见光成像系统(4)、红外光接收镜头(5)和红外光发射镜头(6),所述可见光成像系统(4)的输出端沿着柔性驱动机构(2)连接至数据存储器(103)的输入端,所述红外光接收镜头(5)和红外光发射镜头(6)的输出端分别沿着柔性驱动机构(2)连接至红外测距传感器(102)的输入端,所述红外测距传感器(102)的输出端连接至数据存储器(103)的输入端,数据存储器(103)的输出端连接至终端;所述柔性驱动机构(2)沿着管体周向分布若干柔性定向驱动单元(8),若干柔性定向驱动单元(8)的驱动端连接至驱动器(101)。
2.根据权利要求1所述的一种无人机巡检柔性驱动云台,其特征在于,所述柔性驱动机构(2)内装有面阵光纤传像束(7),其中面阵光纤传像束(7)的一端连接在可见光成像系统(4)上,另一端连接至数据存储器(103)上。
3.根据权利要求2所述的一种无人机巡检柔性驱动云台,其特征在于,所述柔性驱动机构(2)内设有耦合物镜(12)和面阵电荷耦合元件(13),所述面阵光纤传像束(7)的一端依次通过耦合物镜(12)和面阵电荷耦合元件(13)连接至数据存储器(103)上。
4.根据权利要求2所述的一种无人机巡检柔性驱动云台,其特征在于,若干柔性定向驱动单元(8)在柔性驱动机构(2)内,一侧与面阵光纤传像束(7)贴紧,另一侧与柔性驱动机构(2)的内壁贴紧。
5.根据权利要求1所述的一种无人机巡检柔性驱动云台,其特征在于,若干柔性定向驱动单元(8)的长度均与柔性驱动机构(2)的管体长度相等。
6.根据权利要求1所述的一种无人机巡检柔性驱动云台,其特征在于,所述柔性驱动机构(2)内设有红外光输出传像光纤(10),所述红外光输出传像光纤(10)的一端连接至红外光发射镜头(6),另一端连接红外测距传感器(102)。
7.根据权利要求1所述的一种无人机巡检柔性驱动云台,其特征在于,所述柔性驱动机构(2)内设有红外光输入传像光纤(11),所述红外光输入传像光纤(11)的一端连接红外测距传感器(102)另一端连接红外光接收镜头(5)。
8.根据权利要求1所述的一种无人机巡检柔性驱动云台,其特征在于,所述柔性驱动机构(2)的外层包裹弹性支撑层(9),用于在柔性定向驱动单元(8)未发生形变驱动时,柔性驱动机构(2)快速恢复到原来的形状角度。
9.根据权利要求8所述的一种无人机巡检柔性驱动云台,其特征在于,所述弹性支撑层(9)外还包裹绝缘表皮,用于避免外部环境的物理量信号干扰。
10.根据权利要求1所述的一种无人机巡检柔性驱动云台,其特征在于,所述柔性定向驱动单元(8)的材料为柔性压电材料、高分子液晶材料、尼龙丝材料或天然橡胶材料。
技术总结
本技术公开了一种无人机巡检柔性驱动云台,在电器盒与探头之间设置柔性驱动机构,柔性驱动机构代替了传统无人机云台的多个电机驱动的串联结构,有效降低了无人机云台的重量,提高了云台和摄像头的柔韧性和抗击打性。电器盒内设有驱动器、红外测距传感器和数据存储器,都是由芯片组和对应的主板组成,重量同样较轻,进一步减小无人机所需要负荷的重量;柔性驱动机构内沿着管体周向分布若干柔性定向驱动单元,若干柔性定向驱动单元通过驱动器的驱动可实现对柔性驱动机构进行自由度的旋转,提高了无人机巡检柔性驱动云台的灵活性,实现全空间无死角的拍摄,实现了比传统云台摄像头更广的拍摄角度和更强的灵活性。
技术研发人员:李正发,王帆,苏柏年,刘钊,包仪军,秦凯
受保护的技术使用者:国网甘肃省电力公司建设分公司
技术研发日:20230315
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!