无人机微型摄像头云台及无人机的制作方法
本技术属于无人机,尤其涉及无人机微型摄像头云台及无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶的飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。
2、随着无人机在消费类市场越来越普及,市场上无人机搭载的摄像头云台也应用越多,但是大部分云台装载摄像头需要单独配套外壳结构组装成摄像头云台模块,再连接固定到无人机外壳上,由于云台摄像头因为有外壳结构,再配置上无人机外壳,因此无人机的体积及重量就增加了,影响飞行的续航时间和维护成本。
技术实现思路
1、本实用新型实施例的目的在于提供一种无人机微型摄像头云台,旨在解决现有的摄像头云台单独配套外壳所存在的体积大及重量重的问题。
2、本实用新型实施例为了实现上述目的,采用如下技术方案:
3、一种无人机微型摄像头云台,包括:
4、控制主板;
5、用于与无人机外壳连接的云台连接板,所述云台连接板固定连接于控制主板的下端;
6、舵机支架,所述舵机支架固定连接于云台连接板的下端,且舵机支架的下端固定连接有舵机;
7、连接架,所述连接架固定连接于舵机的一端,且连接架的一端固定连接有用于与无人机外壳连接的摄像头支架;以及
8、摄像头模块,所述摄像头模块固定连接于摄像头支架的一端。
9、进一步地,所述摄像头支架的一端螺纹连接有用于与无人机外壳连接的螺杆连接件,所述摄像头模块通过第一螺丝连接于所述摄像头支架上。
10、进一步地,所述舵机的输出端通过第四螺丝连接于所述连接架,所述摄像头支架的另一端通过第五螺丝连接所述连接架。
11、进一步地,所述舵机通过第三螺丝固定连接于所述舵机支架上,所述舵机支架的上端通过第二螺丝连接所述云台连接板。
12、进一步地,所述云台连接板上固定连接有多个用于与无人机外壳连接的减震球。
13、本实用新型实施例还提供了一种无人机,包括无人机外壳及上述的无人机微型摄像头云台,所述无人机微型摄像头云台连接于所述无人机外壳内。
14、进一步地,所述无人机外壳包括顶壳、中接壳及底壳,所述顶壳盖设于所述控制主板的上方,所述中接壳的上端连接于所述顶壳,所述云台连接板置于所述中接壳内,并且所述减震球与所述中接壳固定连接,所述底壳的上端连接所述中接壳的下端,所述舵机支架、舵机、连接架、摄像头支架及摄像头模块置于所述底壳内,并且所述摄像头支架通过所述螺杆连接件固定连接于所述底壳。
15、本实用新型实施例与现有技术相比,有益效果在于:
16、本装置可以将装载控制主板的云台连接板连接于无人机外壳上,将舵机通过舵机支架连接于云台连接板上,摄像头模块通过摄像头支架与连接架连接,舵机支架通过连接架连接于舵机的一端组成角度调节的组件,通过舵机可以带动连接架和摄像头支架进行转动,进而调整摄像头模块的拍摄角度,进而提高摄像头模块的照射角度多样性,提高拍摄灵活性;且本装置无需单独配套外壳结构,组件较少,重量较轻,可以减少本装置的体积及重量。
技术特征:
1.无人机微型摄像头云台,其特征在于,包括:
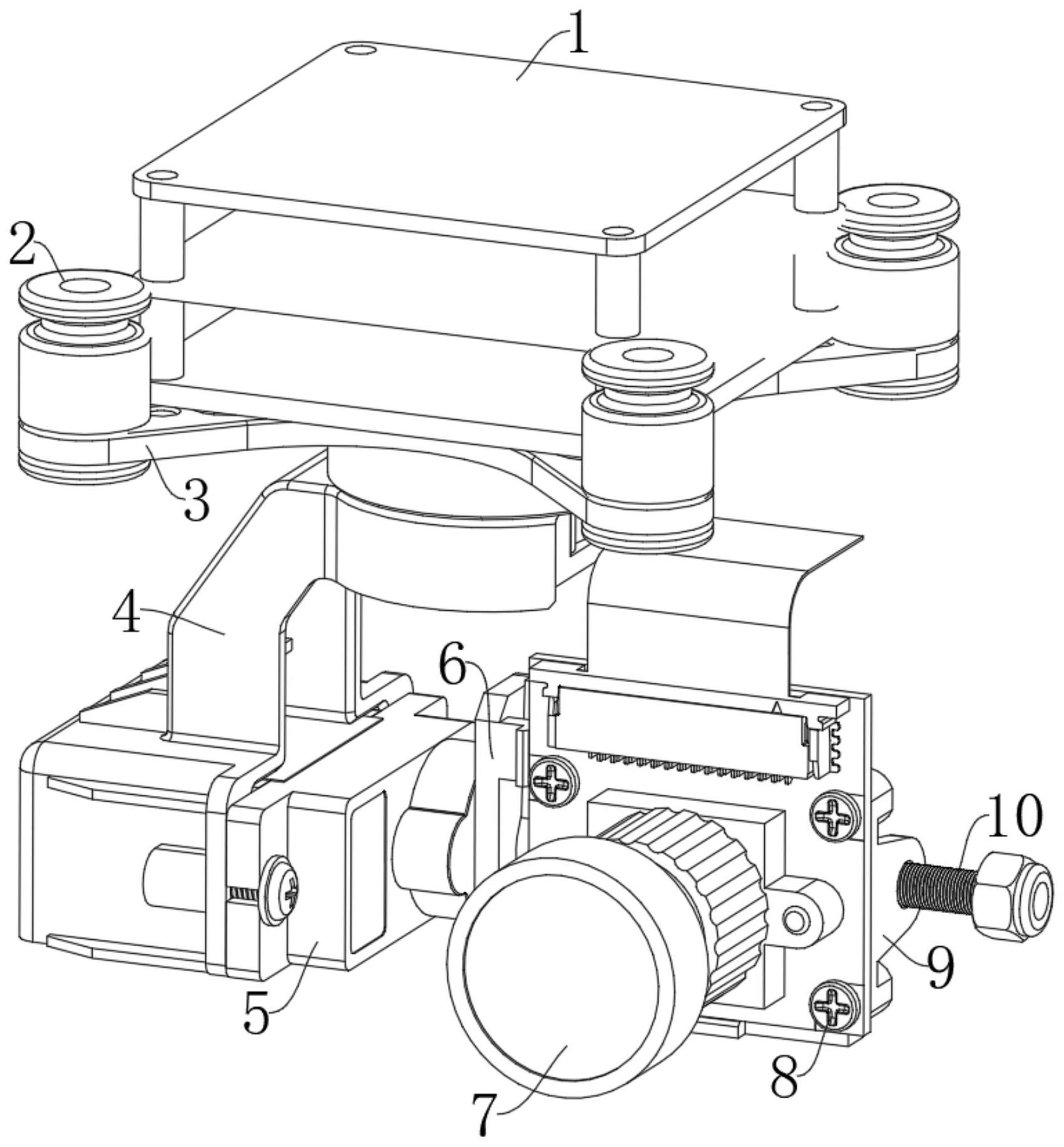
2.如权利要求1所述的无人机微型摄像头云台,其特征在于,所述摄像头支架(9)的一端螺纹连接有用于与无人机外壳连接的螺杆连接件(10),所述摄像头模块(7)通过第一螺丝(8)连接于所述摄像头支架(9)上。
3.如权利要求2所述的无人机微型摄像头云台,其特征在于,所述舵机(5)的输出端通过第四螺丝(13)连接于所述连接架(6),所述摄像头支架(9)的另一端通过第五螺丝(14)连接所述连接架(6)。
4.如权利要求3所述的无人机微型摄像头云台,其特征在于,所述舵机(5)通过第三螺丝(12)固定连接于所述舵机支架(4)上,所述舵机支架(4)(3)的上端通过第二螺丝(11)连接所述云台连接板(3)。
5.如权利要求4所述的无人机微型摄像头云台,其特征在于,所述云台连接板(3)上固定连接有多个用于与无人机外壳连接的减震球(2)。
6.一种无人机,其特征在于,包括无人机外壳及如权利要求5所述的无人机微型摄像头云台,所述无人机微型摄像头云台连接于所述无人机外壳内。
7.如权利要求6所述的无人机,其特征在于,所述无人机外壳包括顶壳(15)、中接壳(16)及底壳(17),所述顶壳(15)盖设于所述控制主板(1)的上方,所述中接壳(16)的上端连接于所述顶壳(15),所述云台连接板(3)置于所述中接壳(16)内,并且所述减震球(2)与所述中接壳(16)固定连接,所述底壳(17)的上端连接所述中接壳(16)的下端,所述舵机支架(4)、舵机(5)、连接架(6)、摄像头支架(9)及摄像头模块(7)置于所述底壳(17)内,并且所述摄像头支架(9)通过所述螺杆连接件(10)固定连接于所述底壳(17)。
技术总结
本技术适用于无人机技术领域,提供了一种无人机微型摄像头云台及无人机。无人机微型摄像头云台包括控制主板、云台连接板和舵机支架,云台连接板固定连接于控制主板的下端,舵机支架固定连接于云台连接板的下端,且舵机支架的下端固定连接有舵机。本装置可以将装载控制主板的云台连接板连接于无人机外壳上,将舵机通过舵机支架连接于云台连接板上,摄像头模块通过摄像头支架与连接架连接,舵机支架通过连接架连接于舵机的一端组成角度调节的组件,通过舵机可以带动连接架进行转动,进而调整摄像头模块的拍摄角度,提高拍摄灵活性,且本装置无需单独配套外壳结构,组件较少,重量较轻,可以减少本装置的体积及重量。
技术研发人员:朱旷军
受保护的技术使用者:深圳市新田科技有限公司
技术研发日:20230327
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!