一种电动多旋翼构型姿态调参试验台的制作方法
本技术涉及多旋翼特性试验,具体为一种电动多旋翼构型姿态调参试验台。
背景技术:
1、多旋翼飞行器可通过每个轴上的电动机转动,带动旋翼,从而产生升推力,通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹。在多旋翼飞行器的制造过程中,需要研究旋翼在不同姿态下的气动干扰以及参数,因此多旋翼特性试验台的作用就是用于开发过程中的参数调试作用。
2、现有技术例如申请号为202210459215.4的中国专利公开了“一种多旋翼无人机姿态平衡调参试验台”,包括底座,下旋转盘、中心轴块组件和无人机固定盘;其中,所述下旋转盘、所述底座均为圆形形状,且所述下旋转盘、所述底座共轴上下设置,无人机固定在本实验台上后,在俯仰、横滚、航向三个轴向上自由灵活移动,实现在无人机不失控的情况下对姿态控制参数的调试工作。此类试验台功能单一,不能模拟多个旋翼之间的气动干扰,也不能模拟倾转旋翼。
技术实现思路
1、本实用新型的目的在于提供了一种电动多旋翼构型姿态调参试验台,以解决背景技术中提出的问题。
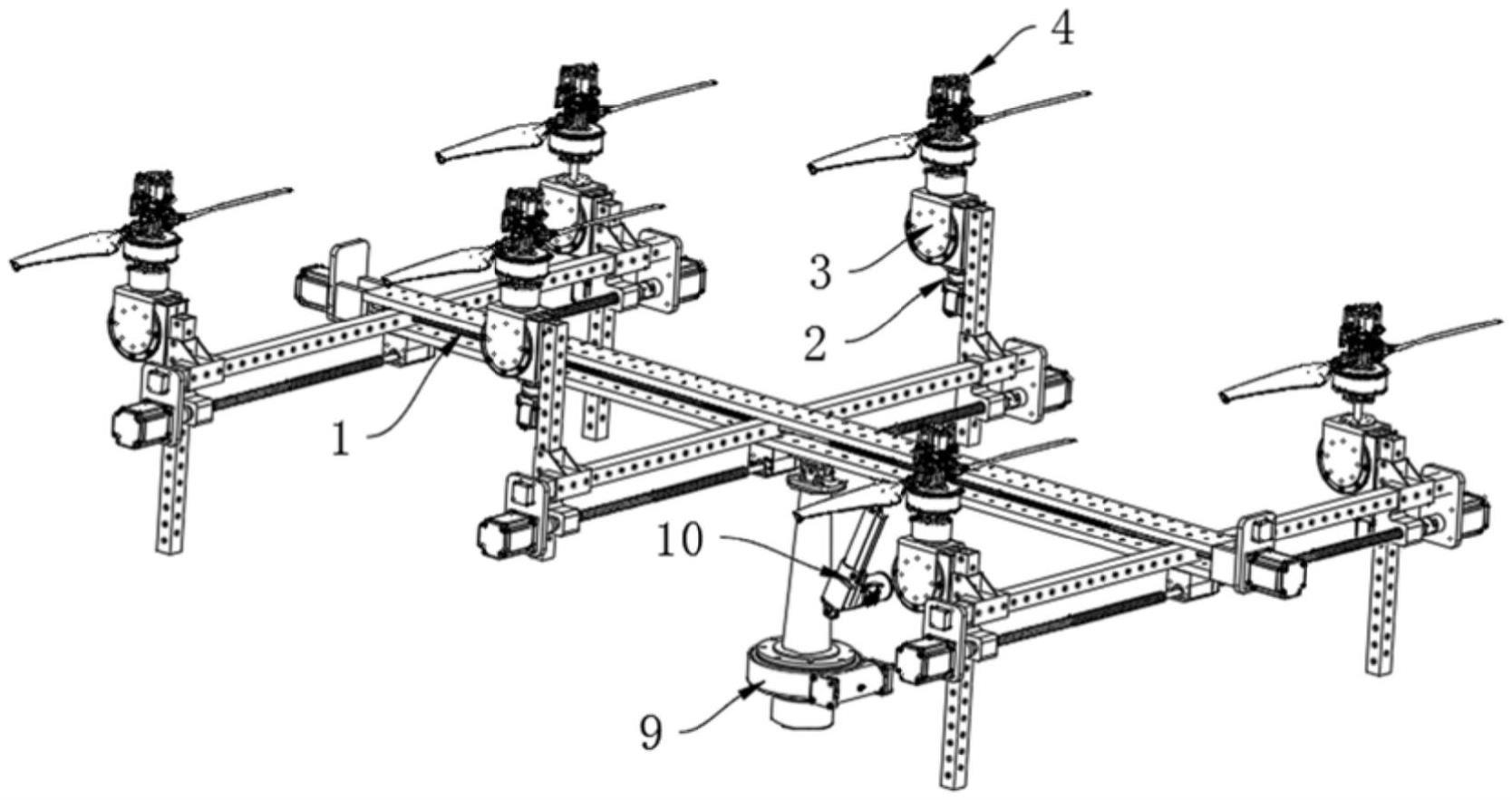
2、为实现上述目的,本实用新型提供如下技术方案:一种电动多旋翼构型姿态调参试验台,包括台架,所述台架上设置有航向姿态控制系统和俯仰姿态控制系统;所述航向姿态控制系统驱动台架在水平面转动,所述俯仰姿态控制系统驱动纵梁在竖直平面摆动;
3、所述台架上设置有多个气动测试座,多个气动测试座上均设置有倾转机构、旋翼机构以及数据采集机构,所述倾转机构设置在气动测试座上,数据采集机构包括六分量天平,六分量天平捕捉旋翼机构在各方向的气动力、反扭矩和倾转力矩;所述台架还包括驱动组件,所述驱动组件控制多个气动测试座的位移。
4、通过上述技术方案,可模拟多个旋翼在飞行过程中的偏航和俯仰姿态;通过设置倾转机构、旋翼机构以及气动测试座,模拟旋翼的倾转动作,模拟旋翼机构的垂直起降、过渡以及平飞姿态;旋翼各方向的气动力、反扭矩和倾转力矩通过六分量天平测量;通过驱动组件分别控制多个气动测试座的位置,可改变多个旋翼的前后间距、左右间距以及高度间距;配合数据采集系统获得测量参数,研究多个旋翼在不同飞行姿态下的气动特性。
5、优选的,所述台架包括若干x轴活动梁、y轴活动梁以及若干z轴活动梁,若干所述x轴活动梁以y轴活动梁为轴线等距分布,且若干x轴活动梁与y轴活动梁滑动连接,若干z轴活动梁以y轴活动梁为轴心等距分布,且若干z轴活动梁分别与x轴活动梁滑动连接,多个气动测试座分别设置在z轴活动梁上;所述驱动组件分别驱动气动测试座在z轴活动梁做竖直方向的运动、驱动z轴活动梁在y轴活动梁上运动、以及驱动x轴活动梁在y轴活动梁上运动。
6、通过上述技术方案,可分别控制每组旋翼机构在x、y、z方向的位移,从而模拟每组旋翼机构在不同位置关系下的气动特性。
7、优选的,所述驱动组件包括若干组相对设置的x轴驱动电机,每组x轴驱动电机分别设置在x轴活动梁的两端,所述y轴活动梁上等距分布有若干安装座,每组x轴驱动电机和安装座之间均转动设置有一组x轴丝杠,每组x轴驱动电机通过x轴丝杠分别驱动z轴活动梁进行相对或远离方向运动;
8、所述驱动组件还包括若干组y轴驱动电机,若干组y轴驱动电机分别驱动若干组x轴活动梁在y轴活动梁上滑动;
9、所述驱动组件还包括若干z轴驱动电机,若干z轴驱动电机分别驱动气动测试座在z轴活动梁做竖直方向的运动;
10、所述数据采集机构还包括计算机,x轴驱动电机、y轴驱动电机以及z轴驱动电机均与所述计算机电连接。
11、通过上述技术方案,可自动调整各个旋翼机构之间的相对位置,与传统手动调整方法相比,可实现各个旋翼机构位置的全自动控制,更加方便、省时省力。
12、优选的,所述旋翼机构包括中间轴,中间轴上分布有自动倾斜器,所述自动倾斜器包括固定环和旋转环,所述固定环安装在旋翼轴上,旋转环通过轴承和固定环同轴转动连接;还包括桨毂、桨叶以及旋翼电机,所述旋翼电机驱动桨毂转动,桨毂通过联动机构与自动倾斜器相连接;
13、所述联动机构包括若干舵机和若干联动拉杆,若干联动拉杆的一端与舵机的输出端固定连接,另一端和所述固定环相连,若干所述舵机通过若干联动拉杆驱动桨叶的周期变距。
14、优选的,所述倾转机构包括直线气缸和蜗轮蜗杆组件,所述直线气缸驱动蜗轮蜗杆组件带动所述旋翼机构倾转,所述六分量天平设置在所述气动测试座上并随旋翼机构同步倾转。
15、通过上述技术方案,需要模拟旋翼机构在垂直起降过程的气动特性时,旋翼轴处于竖直状态;需要模拟旋翼机构在平飞状态的气动特性时,直线气缸驱动蜗轮蜗杆组件转动,带动旋翼机构倾转,使旋翼轴处于平行状态。
16、优选的,所述航向姿态控制系统包括姿态控制电机,所述台架还包括竖直设置的底梁,底梁的一端与所述姿态控制电机的输出端固定连接,另一端与y轴活动梁的中心铰接连接。
17、优选的,所述俯仰姿态控制系统包括电缸,电缸的输出端与y轴活动梁的一侧铰接连接。
18、通过上述技术方案,通过姿态控制电机驱动台架以y轴活动梁的中心转动,从而模拟不同的飞行姿态;通过电缸驱动y轴活动量在竖直平面内摆动模拟俯仰姿态。
19、优选的,若干所述舵机之间以90°或120°间隔布置。
20、优选的,所述气动测试座上还设置有传感器。
21、通过上述技术方案,转速、电流和电压等参数通过传感器测量,周期变距角、总距角、倾转角度、偏航角度和俯仰角度等通过舵机标定计算获得。
22、有益效果:
23、本实用新型通过航向姿态控制系统和俯仰姿态控制系统,可模拟多个旋翼在飞行过程中的偏航和俯仰姿态;通过设置倾转机构、旋翼机构以及气动测试座,模拟旋翼的倾转动作,模拟旋翼机构的垂直起降、过渡以及平飞姿态;旋翼各方向的气动力、反扭矩和倾转力矩通过六分量天平测量。
24、本实用新型通过设置倾转机构、旋翼机构以及气动测试座,模拟旋翼的倾转动作,模拟旋翼机构的垂直起降、过渡以及平飞姿态;旋翼各方向的气动力、反扭矩和倾转力矩通过六分量天平测量;通过驱动组件分别控制多个气动测试座的位置,可改变多个旋翼的前后间距、左右间距以及高度间距;配合数据采集系统获得测量参数,研究多个旋翼在不同飞行姿态下的气动特性。
25、本实用新型通过设置计算机,通过计算机设定各个旋翼机构的位置关系,可自动调整各个旋翼机构之间的相对位置,与传统手动调整方法相比,可实现各个旋翼机构位置的全自动控制,更加方便、省时省力;转速、电流和电压等参数通过传感器测量,周期变距角、总距角、倾转角度、偏航角度和俯仰角度等通过舵机标定计算获得。
技术特征:
1.一种电动多旋翼构型姿态调参试验台,其特征在于:包括台架(1),所述台架(1)上设置有航向姿态控制系统和俯仰姿态控制系统;所述航向姿态控制系统驱动台架(1)在水平面转动,所述俯仰姿态控制系统驱动纵梁在竖直平面摆动;
2.根据权利要求1所述的电动多旋翼构型姿态调参试验台,其特征在于:所述台架(1)包括若干x轴活动梁(11)、y轴活动梁(12)以及若干z轴活动梁(13),若干所述x轴活动梁(11)以y轴活动梁(12)为轴线等距分布,且若干x轴活动梁(11)与y轴活动梁(12)滑动连接,若干z轴活动梁(13)以y轴活动梁(12)为轴心等距分布,且若干z轴活动梁(13)分别与x轴活动梁(11)滑动连接,多个气动测试座(2)分别设置在z轴活动梁(13)上;所述驱动组件分别驱动气动测试座(2)在z轴活动梁(13)做竖直方向的运动、驱动z轴活动梁(13)在y轴活动梁(12)上运动、以及驱动x轴活动梁(11)在y轴活动梁(12)上运动。
3.根据权利要求2所述的电动多旋翼构型姿态调参试验台,其特征在于:
4.根据权利要求1所述的电动多旋翼构型姿态调参试验台,其特征在于:所述旋翼机构(4)包括中间轴,中间轴上分布有自动倾斜器(42),所述自动倾斜器(42)包括固定环(43)和旋转环(44),所述固定环(43)安装在旋翼轴上,旋转环(44)通过轴承和固定环(43)同轴转动连接;还包括桨毂(45)、桨叶(46)以及旋翼电机(41),所述旋翼电机(41)驱动桨毂(45)转动,桨毂(45)通过联动机构与自动倾斜器(42)相连接;
5.根据权利要求4所述的电动多旋翼构型姿态调参试验台,其特征在于:所述倾转机构(3)包括直线气缸(31)和蜗轮蜗杆组件(32),所述直线气缸(31)驱动蜗轮蜗杆组件(32)带动所述旋翼机构(4)倾转,所述六分量天平(5)设置在所述气动测试座(2)上并随旋翼机构(4)同步倾转。
6.根据权利要求1所述的电动多旋翼构型姿态调参试验台,其特征在于:所述航向姿态控制系统包括姿态控制电机(9),所述台架(1)还包括竖直设置的底梁(14),底梁(14)的一端与所述姿态控制电机(9)的输出端固定连接,另一端与y轴活动梁(12)的中心铰接连接。
7.根据权利要求1所述的电动多旋翼构型姿态调参试验台,其特征在于:
8.根据权利要求4所述的电动多旋翼构型姿态调参试验台,其特征在于:
9.根据权利要求1所述的电动多旋翼构型姿态调参试验台,其特征在于:
技术总结
本技术公开了一种电动多旋翼构型姿态调参试验台,包括台架,所述台架上设置有航向姿态控制系统和俯仰姿态控制系统;所述台架上设置有多个气动测试座,多个气动测试座上均设置有倾转机构、旋翼机构以及数据采集机构,所述驱动组件控制多个气动测试座的位移。通过航向姿态控制系统和俯仰姿态控制系统,可模拟多个旋翼在飞行过程中的偏航和俯仰姿态;通过设置倾转机构可模拟旋翼的倾转动作,旋翼各方向的气动力、反扭矩和倾转力矩通过六分量天平测量;通过驱动组件分别控制多个气动测试座的位置,可改变多个旋翼的前后间距、左右间距以及高度间距;配合数据采集系统获得测量参数,研究多个旋翼在不同飞行姿态下的气动特性。
技术研发人员:何海滨,李宜恒,冯旭碧,杨超,张静
受保护的技术使用者:零重力飞机工业(合肥)有限公司
技术研发日:20230612
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!