旋翼机模块化姿态控制旋翼头的制作方法
本技术涉及自转旋翼飞行器,尤其涉及旋翼机模块化姿态控制旋翼头。
背景技术:
1、自转旋翼机是一种利用相对气流吹动旋翼自转以产生升力的旋翼航空器,它的前进力由发动机带动螺旋桨直接提供,是一种介于直升机和固定翼飞机之间的飞行器。得益于其独特的飞行原理和结构特点,自转旋翼机与固定翼飞机和直升机相比,操作简单,成本较低,安全性高,具有起降距离短、低速超低空飞行能力与灵活操纵性,但不能垂直起降、不能悬停。且具有简单轻巧、便于隐蔽等特点,可用于空中摄影、武器发射、战地侦察等。
2、自转旋翼机升力来源于顶部旋翼的旋转产生,前进动力来源于飞机尾部的推进螺旋桨。飞机的姿态控制主要由旋翼头姿态控制杆和垂直尾翼方向舵的控制实现,方向舵控制飞机航向,姿态控制杆通过拉杆控制旋翼系统倾斜角度进而控制飞机的俯仰姿态和滚转姿态。
3、自转旋翼机的主要姿态控制部分集中在旋翼头部分,目前市面上的自转旋翼机主要使用整体航空铝加工的旋翼头,存在使用维护成本高,且单一旋翼头无法适配不同类型旋翼等特点。因此模块化旋翼头可有效改善维护成本,解决不同类型旋翼适配的问题。
技术实现思路
1、本实用新型的目的在于解决现有技术中的上述问题,提供旋翼机模块化姿态控制旋翼头,在提供安全性和稳定性的同时,以解决使用维护成本高,且单一旋翼头无法适配不同类型旋翼等问题。
2、为达到上述目的,本实用新型采用如下技术方案:
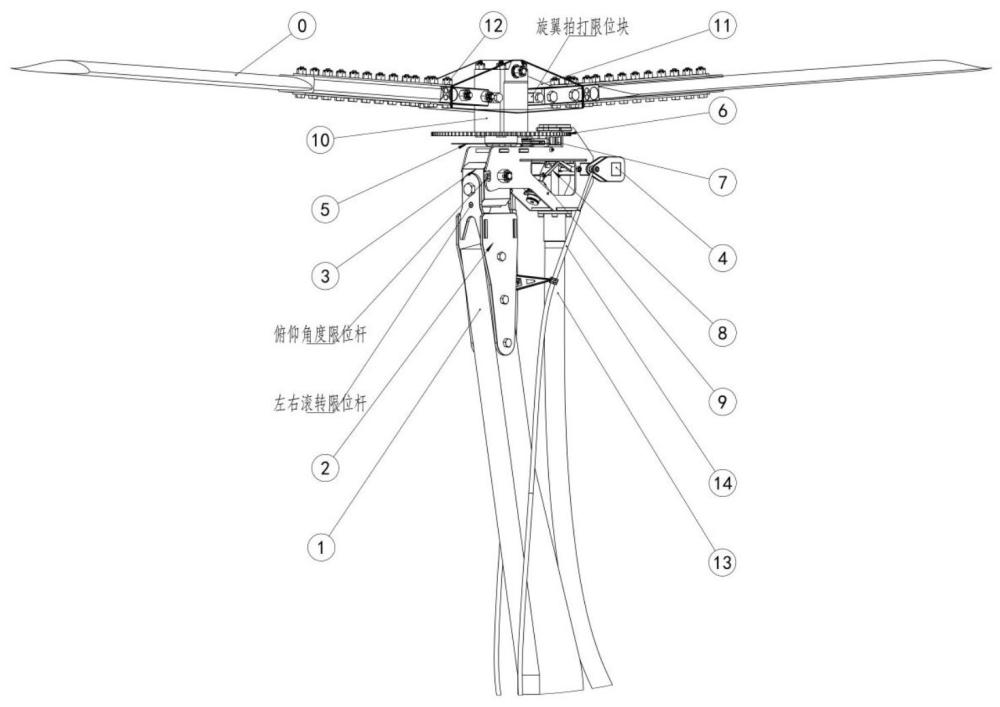
3、旋翼机模块化姿态控制旋翼头包括:机身骨架、旋翼头安装底座、方向块、姿态控制机构、刹车、预旋机构、旋转机构、旋翼拍打限位机构、旋翼安装组件、软轴拉线;所述机身骨架连接旋翼头安底座,所述姿态控制机构通过方向块连接;所述刹车、预旋机构、旋转机构安装于姿态控制机构上方;所述旋翼拍打限位机构、旋翼安装组件安装于旋转机构上方;所述两组软轴拉线分别与姿态控制机构的两侧相连接。
4、本实用新型中,所述方向块有左右滚转和俯仰控制角度限位。
5、本实用新型中,所述姿态控制机构采用软轴拉线。
6、本实用新型中,所述刹车采用自行车刹车组件,更换维护成本低。
7、本实用新型中,所述预旋机构采用软轴驱动,驱动头采用气动拨叉顶出方式。
8、本实用新型中,所述旋转机构采用双圆锥滚子轴承。
9、本实用新型中,所述旋翼拍打限位机构由不锈钢跷跷板连接旋转机构,限位块限制主旋翼拍打角度。
10、本实用新型中,所述旋翼安装组件由不锈钢旋翼安装夹板和主旋翼高度夹块组成,用于安装铝合金主旋翼;使用复合主旋翼,可拆除旋翼安装组件,直接安装在旋翼拍打限位机构上。
11、相对于现有技术,本实用新型技术方案取得的有益效果是:
12、该设计简单实用高效,有降低自转旋翼机旋翼头保养维护成本,实现不同类型规格旋翼片在同一旋翼头上安装使用,不需要整体更换旋翼头,保障姿态控制机构稳定性和安全性的同时,采用软轴能有效降低其重量。
技术特征:
1.旋翼机模块化姿态控制旋翼头,其特征在于:包括机身骨架、旋翼头安装底座、方向块、姿态控制机构、刹车、预旋机构、旋转机构、旋翼拍打限位机构、旋翼安装组件、软轴、软轴拉线;所述机身骨架连接旋翼头安底座,所述姿态控制机构通过方向块连接;所述刹车、预旋机构、旋转机构安装于姿态控制机构上方;所述旋翼拍打限位机构、旋翼安装组件安装于旋转机构上方;所述两组软轴拉线分别与姿态控制机构的两侧相连接。
2.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述方向块有左右滚转和俯仰控制角度限位。
3.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述姿态控制机构采用软轴拉线。
4.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述刹车采用自行车刹车组件,更换维护成本低。
5.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述预旋机构采用软轴驱动,驱动齿采用气动拨叉顶出方式。
6.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述旋转机构采用两组单列圆锥滚子轴承。
7.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述旋翼拍打限位机构由不锈钢跷跷板连接旋转机构,限位块限制主旋翼拍打角度。
8.如权利要求1所述的旋翼机模块化姿态控制旋翼头,其特征在于:所述旋翼安装组件由不锈钢旋翼安装夹板和主旋翼高度夹块组成,用于安装铝合金主旋翼;使用复合主旋翼,可拆除旋翼安装组件,直接安装在旋翼拍打限位机构上。
技术总结
旋翼机模块化姿态控制旋翼头,其特征在于:包括机身骨架、旋翼头安装底座、方向块、姿态控制机构、刹车、预旋机构、旋转机构、旋翼拍打限位机构、旋翼安装组件、软轴、软轴拉线等模块化构件;所述机身骨架连接旋翼头安底座,所述姿态控制机构通过方向块连接;所述刹车、预旋机构、旋转机构安装于姿态控制机构上方;所述旋翼拍打限位机构、旋翼安装组件安装于旋转机构上方;所述两组软轴拉线分别与姿态控制机构的两侧相连接。该设计简单实用高效,有降低自转旋翼机旋翼头保养维护成本,实现不同类型规格旋翼片在同一旋翼头上安装使用,不需要整体更换旋翼头,保障姿态控制机构稳定性和安全性的同时,采用软轴能有效降低其重量。
技术研发人员:彭彩奎
受保护的技术使用者:彭彩奎
技术研发日:20230626
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!