一种监测草原害虫的遥感无人机的制作方法
本技术涉及遥感无人机,具体是一种监测草原害虫的遥感无人机。
背景技术:
1、无人机遥感是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、gps差分定位技术和遥感应用技术,能够实现自动化、智能化、专用化快速获取国土资源、自然环境、地震灾区等空间遥感信息,来完成数据分析,现有的无人机存在监测在飞行时尤其在低空飞行时,容易受到树枝或者其它异物的影响,树枝容易将摄像头的镜头打碎,且镜头在碰到枝叶时会有一些异物残留在镜头的表面,从而影响摄像头的正常拍摄,还有摄像头在高空中拍摄时,摄像头的表面容易凝结水滴或者雾气,使得摄像头镜面比较模糊,会影响无人机遥感监测的情况,造成收集数据的误差,且在无人机进行降落时,具有一定的冲击力,极易造成螺旋桨等部件的毁坏。
2、基于此,现在提供一种监测草原害虫的遥感无人机,可以消除现有装置存在的弊端。
技术实现思路
1、本实用新型的目的在于提供一种监测草原害虫的遥感无人机,以解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
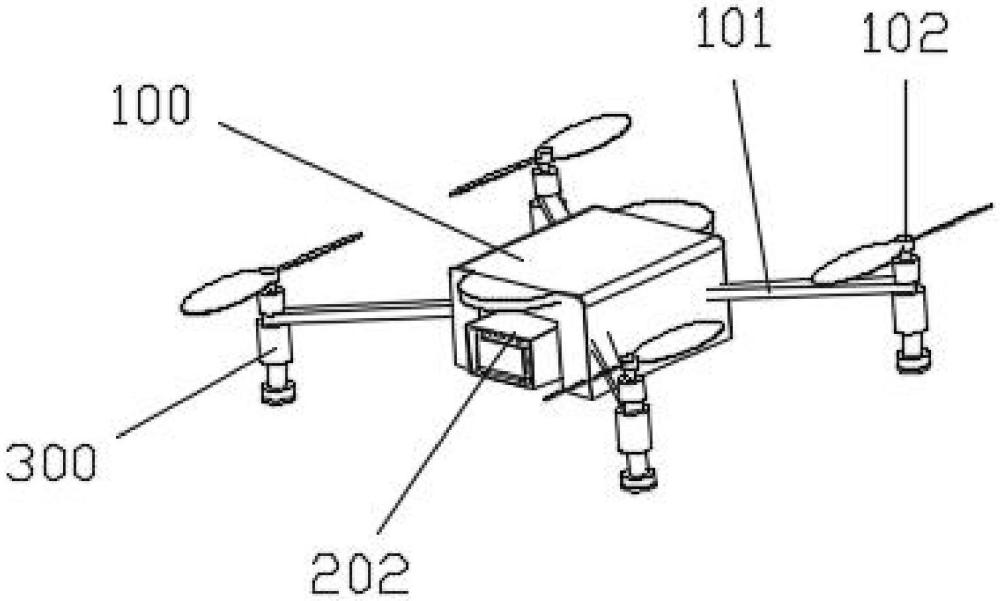
3、一种监测草原害虫的遥感无人机,包括:
4、无人机本体;
5、臂杆,所述臂杆设置在无人机本体四周表面;
6、动力组件,所述动力组件设置在臂杆末端上端;
7、摄像头,所述摄像头安装在摄像框内部,且分别位于无人机本体的底端两侧,所述摄像头外侧设有防护组件,所述无人机本体的底端两侧均设置有清理组件,且臂杆下端设有支架。
8、优选的,所述摄像框两侧设有转动座,所述转动座与无人机本体内侧转动电机输出端连接。
9、优选的,所述防护组件包括保护框和透明板,所述保护框设置在摄像头外侧,所述透明板设置在保护框上,且透明板与摄像头的端面相固定。
10、优选的,所述清理组件包括清理海绵、引导轮、透明带、摩擦电机和摩擦齿轮,所述清理海绵设置在摄像框内壁,所述引导轮围绕摄像头分布,所述透明带与引导轮转动接触,所述摩擦电机设置在摄像框下端,所述摩擦齿轮与摩擦电机输出端连接。
11、优选的,所述支架包括缓冲套、弹性件、缓冲滑块和缓冲支腿、底板,所述缓冲套固定在无人机臂杆下端,所述弹性件设置在缓冲套内部,所述缓冲支腿设置在缓冲套下端,所述缓冲滑块设置在缓冲支腿上端,且缓冲滑块与缓冲套滑动连接,与所述底板设置在缓冲支腿下端。
12、优选的,所述摩擦齿轮与透明带抵压接触,且引导轮与摩擦齿轮提高了透明带张力。
13、优选的,所述底板的底部固定连接有橡胶缓冲垫,所述橡胶缓冲垫的底部设置有防滑纹。
14、本实用新型通过摄像框、清理海绵、保护框、摩擦电机、摩擦齿轮、缓冲滑块、缓冲支腿、防滑橡胶垫等的配合,防止摄像头与外界物体发生碰撞而毁坏,便于清理镜头表面的异物和产生的水滴或者雾气,在无人机降落时实现缓冲作用,对无人机进行了保护,实用性强。
技术特征:
1.一种监测草原害虫的遥感无人机,包括:
2.根据权利要求1所述的一种监测草原害虫的遥感无人机,其特征在于,所述摄像框(202)两侧设有转动座(201),所述转动座(201)与无人机本体(100)内侧转动电机输出端连接。
3.根据权利要求1所述的一种监测草原害虫的遥感无人机,其特征在于,所述防护组件包括保护框(205)和透明板(206),所述保护框(205)设置在摄像头(200)外侧,所述透明板(206)设置在保护框(205)上,且透明板(206)与摄像头(200)的端面相固定。
4.根据权利要求1所述的一种监测草原害虫的遥感无人机,其特征在于,所述清理组件包括清理海绵(203)、引导轮(204)、透明带(207)、摩擦电机(208)和摩擦齿轮(209),所述清理海绵(203)设置在摄像框(202)内壁,所述引导轮(204)围绕摄像头(200)分布,所述透明带(207)与引导轮(204)转动接触,所述摩擦电机(208)设置在摄像框(202)下端,所述摩擦齿轮(209)与摩擦电机(208)输出端连接。
5.根据权利要求1所述的一种监测草原害虫的遥感无人机,其特征在于,所述支架(300)包括缓冲套(301)、弹性件(302)、缓冲滑块(303)、缓冲支腿(304)和底板(305),所述缓冲套(301)固定在无人机臂杆(101)下端,所述弹性件(302)设置在缓冲套(301)内部,所述缓冲支腿(304)设置在缓冲套(301)下端,所述缓冲滑块(303)设置在缓冲支腿(304)上端,且缓冲滑块(303)与缓冲套(301)滑动连接,所述底板(305)设置在缓冲支腿(304)下端。
6.根据权利要求4所述的一种监测草原害虫的遥感无人机,其特征在于,所述摩擦齿轮(209)与透明带(207)抵压接触,且引导轮(204)与摩擦齿轮(209)提高了透明带(207)张力。
7.根据权利要求5所述的一种监测草原害虫的遥感无人机,其特征在于,所述底板(305)的底部固定连接有橡胶缓冲垫(306),所述橡胶缓冲垫(306)的底部设置有防滑纹。
技术总结
本技术公开了一种监测草原害虫的遥感无人机,涉及遥感无人机技术领域,该遥感无人机包括无人机本体、臂杆、动力组件和摄像头;所述臂杆设置在无人机本体四周表面,所述动力组件设置在臂杆末端上端,所述摄像头安装在摄像框内部,且分别位于无人机本体的底端两侧,所述摄像头外侧设有防护组件,所述无人机本体的底端两侧均设置有清理组件,且臂杆下端设有支架;本技术通过摄像框、清理海绵、保护框、摩擦电机、摩擦齿轮、缓冲滑块、缓冲支腿、防滑橡胶垫等的配合,防止摄像头与外界物体发生碰撞而毁坏,便于清理镜头表面的异物和产生的水滴或者雾气,在无人机降落时实现缓冲作用,对无人机进行了保护。
技术研发人员:于红妍,王贤颖,唐炳民,雅琴,赵晓军,吉汉忠,晁玉龙,杨洁,马兴赟,慈建勋,刘华,谭晶,于瑶,陈秉龙,马少忠
受保护的技术使用者:祁连山国家公园青海服务保障中心
技术研发日:20230721
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!