室内机器人及系统的制作方法
本公开涉及室内监控,尤其涉及一种室内机器人及系统。
背景技术:
1、相关技术中,室内机器人多为不可移动或只能够紧贴地面移动,例如室内监控设备等室内机器人,导致其监控范围较小。
技术实现思路
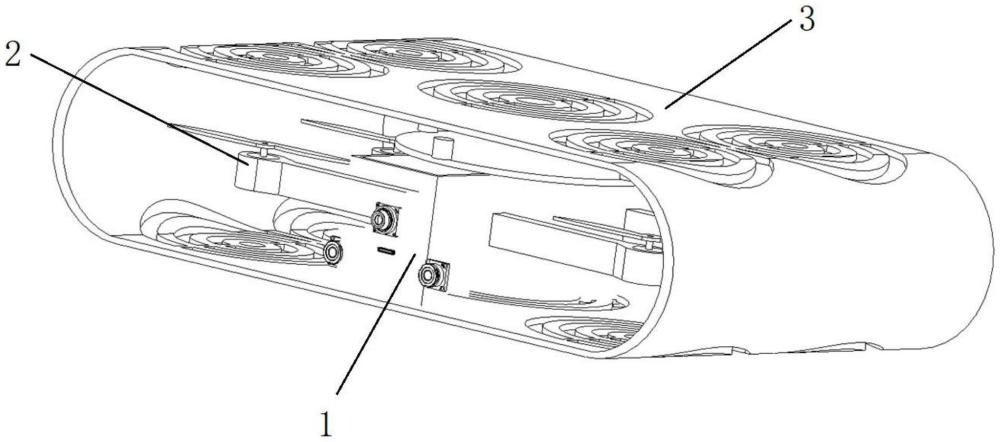
1、为克服相关技术中存在的问题,本公开提供一种室内机器人及系统,通过在用于室内监控的机器人本体上连接飞行组件,使飞行组件能够携带机器人本体移动,从而扩大机器人本体的监控范围,而且,为了保证室内飞行的安全,在机器人本体和飞行组件外部设置壳体,以保证飞行组件和机器人本体在有限的室内空间的飞行安全。
2、根据本公开实施例的第一方面,提供一种室内机器人,包括:
3、机器人本体,所述机器人本体用于室内监控;
4、飞行组件,所述飞行组件与所述机器人本体连接,用于携带所述机器人本体移动;
5、壳体,所述机器人本体和所述飞行组件设置于所述壳体的内部,在与所述飞行组件相对的所述壳体的顶面和底面均设置有通风孔。
6、可选地,所述机器人本体包括基座、电池和摄像组件;
7、所述基座的底部与所述壳体连接;
8、所述电池设置于所述基座的内部;
9、所述壳体的两个相对的侧面开口,所述摄像组件设置于所述基座上的任一所述开口一侧,且所述电池与所述摄像组件电连接。
10、可选地,所述机器人本体还包括录音组件;所述录音组件包括支撑盘和多个麦克风;
11、所述支撑盘连接在所述基座的顶部;
12、所述多个麦克风在所述支撑盘上环形阵列设置。
13、可选地,所述飞行组件包括多个对称设置于所述基座两侧的飞行翼,每个所述飞行翼包括支撑架、电机和桨叶;
14、所述支撑架与所述基座连接;
15、所述电机设置于所述支撑架上远离所述基座的一端;
16、所述桨叶与所述电机连接,与所述桨叶相对的所述壳体的顶面和底面均设置有所述通风孔;
17、所述电机与所述电池电连接。
18、可选地,所述室内机器人还包括无线充电组件,所述无线充电组件包括充电线圈;
19、所述充电线圈设置于所述基座的底部并伸出所述壳体的底部,所述充电线圈与所述电池电连接,所述充电线圈用于与充电基站配合进行无线充电。
20、可选地,所述无线充电组件还包括定位识别装置;
21、所述定位识别装置设置于所述基座的底部并伸出所述壳体的底部,所述定位识别装置与所述电池连接,所述定位识别装置用于识别所述充电基站。
22、可选地,所述室内机器人还包括声音输出组件,所述声音输出组件设置在所述基座上,所述声音输出组件与所述电池电连接。
23、可选地,所述室内机器人还包括通信模块;
24、所述通信模块设置在所述基座上,所述通信模块与所述电池和所述摄像组件连接,并与用户通信连接,以将摄像组件获取的监控信息发送至用户。
25、可选地,每个所述通风孔由多个大小不同的半圆环孔组成。
26、根据本公开实施例的第二方面,提供一种室内机器人系统,包括第一方面所提供的室内机器人,以及充电基站,所述充电基站与所述室内机器人配合,以实现对所述室内机器人的无线充电。
27、本公开的实施例提供的技术方案可以包括以下有益效果:
28、通过在用于室内监控的机器人本体上连接飞行组件,使飞行组件能够携带机器人本体移动,从而扩大机器人本体的监控范围,而且,为了保证室内飞行的安全,在机器人本体和飞行组件外部设置壳体,以避免飞行组件在有限的室内空间的飞行安全。
29、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种室内机器人,其特征在于,包括:
2.根据权利要求1所述的室内机器人,其特征在于,所述机器人本体(1)包括基座(11)、电池和摄像组件(12);
3.根据权利要求2所述的室内机器人,其特征在于,所述机器人本体(1)还包括录音组件(13);所述录音组件(13)包括支撑盘(131)和多个麦克风(132);
4.根据权利要求2所述的室内机器人,其特征在于,所述飞行组件包括多个设置于所述基座(11)两侧的飞行翼(2),每个所述飞行翼(2)包括支撑架(21)、电机(22)和桨叶(23);
5.根据权利要求2所述的室内机器人,其特征在于,所述室内机器人还包括无线充电组件(4),所述无线充电组件(4)包括充电线圈;
6.根据权利要求5所述的室内机器人,其特征在于,所述无线充电组件(4)还包括定位识别装置(5);
7.根据权利要求2所述的室内机器人,其特征在于,
8.根据权利要求2所述的室内机器人,其特征在于,所述室内机器人还包括通信模块;
9.根据权利要求1所述的室内机器人,其特征在于,每个所述通风孔由多个大小不同的半圆环孔组成。
10.一种室内机器人系统,其特征在于,包括权利要求1-9任一项所述的室内机器人,以及充电基站,所述充电基站与所述室内机器人配合,以实现对所述室内机器人的无线充电。
技术总结
本公开涉及一种室内机器人及系统,涉及室内监控技术领域,该室内机器人包括机器人本体、飞行组件和壳体,其中,机器人本体用于室内监控,飞行组件与机器人本体连接,用于携带机器人本体移动,机器人本体和飞行组件设置于壳体的内部,在与飞行组件相对的壳体的顶面和底面均设置有通风孔。通过在用于室内监控的机器人本体上连接飞行组件,使飞行组件能够携带机器人本体移动,从而扩大机器人本体的监控范围,而且,为了保证室内飞行的安全,在机器人本体和飞行组件外部设置壳体,以保证飞行组件和机器人本体在有限的室内空间的飞行安全。
技术研发人员:杨宗保,周明亮,王永庆,张迪
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:20230822
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!