一种无人机起落减振结构的制作方法
本技术涉及减振机构,特别涉及一种无人机起落减振结构,具体为无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机在起落过程中,无人机起落架是飞机起降过程中的重要器件,对它的重量,缓冲能力,安装方式和可靠性都有严格的技术要求,否则会对整个起降过程产生不利影响,甚至造成无人机的损伤;
2、中国公开专利(公开号cn215752992u)公开了一种无人机起落架,其包括:缓冲机构、固定块、支撑杆和支撑脚,所述缓冲机构顶端与机体相连,底端与所述固定块相连;所述固定块内部设置有空腔,所述空腔内横向设置有滑杆,所述滑杆两侧均套设有滑块,所述滑块底端与所述支撑杆相连,所述支撑杆底端连接有支撑脚,所述支撑杆包括固定杆、套筒、第二弹簧和底杆,所述固定杆顶端与所述滑块相连,所述套筒套设在所述固定杆底端,且所述套筒通过所述第二弹簧与所述底杆相连;
3、弹簧作为该无人机起落架的减振元件,在无人机着陆过程中,弹簧被压缩以吸收着陆的冲击力,即弹簧在受到压缩时储存了大量的弹性势能,在缓冲后释放这弹性势能时会产生反弹力,容易导致着陆后的不稳定性;
4、为此,提出一种无人机起落减振结构。
技术实现思路
1、有鉴于此,本实用新型提供一种无人机起落减振结构,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本实用新型的技术方案是这样实现的:一种无人机起落减振结构,包括
3、无人机机构,所述无人机机构包括机体;
4、稳固机构,所述稳固机构包括底撑架、四个v型连接件和支撑杆;
5、所述底撑架的顶部螺丝连接于机体的底部,所述底撑架的四角分别固定连接于四个v型连接件的一侧,四个所述v型连接件的另一侧均固定连接有呈倾斜设置的支撑杆;
6、减振机构,所述减振机构包括微型缸、平衡板、四个平衡杆、滑块、活塞头、橡胶头、内连杆、外撑管、滑槽和内撑管;
7、所述微型缸的顶部螺丝连接于底撑架的底部,所述平衡板的顶部固定于微型缸的输出轴端,四个所述平衡杆的一端分别焊接于平衡板的四角,所述平衡杆的另一端固定连接有滑块,所述滑块的一侧固定连接于活塞头的外壁,所述活塞头的底部固定连接于橡胶头的顶部,所述内连杆的顶部固定于橡胶头的底部,所述内撑管包覆固定于内连杆的外壁下部,所述内撑管的外壁滑动连接于外撑管的内壁,所述外撑管的顶端固定连接于支撑杆的底端,所述平衡板的底部分别安装有压力传感器和加速度计。
8、进一步优选的,所述外撑管的外侧壁开设有滑槽,所述滑块的外壁嵌入并滑动连接于滑槽的内壁,所述内撑管的底端固定连接有底撑座,所述底撑座呈弧形设置。
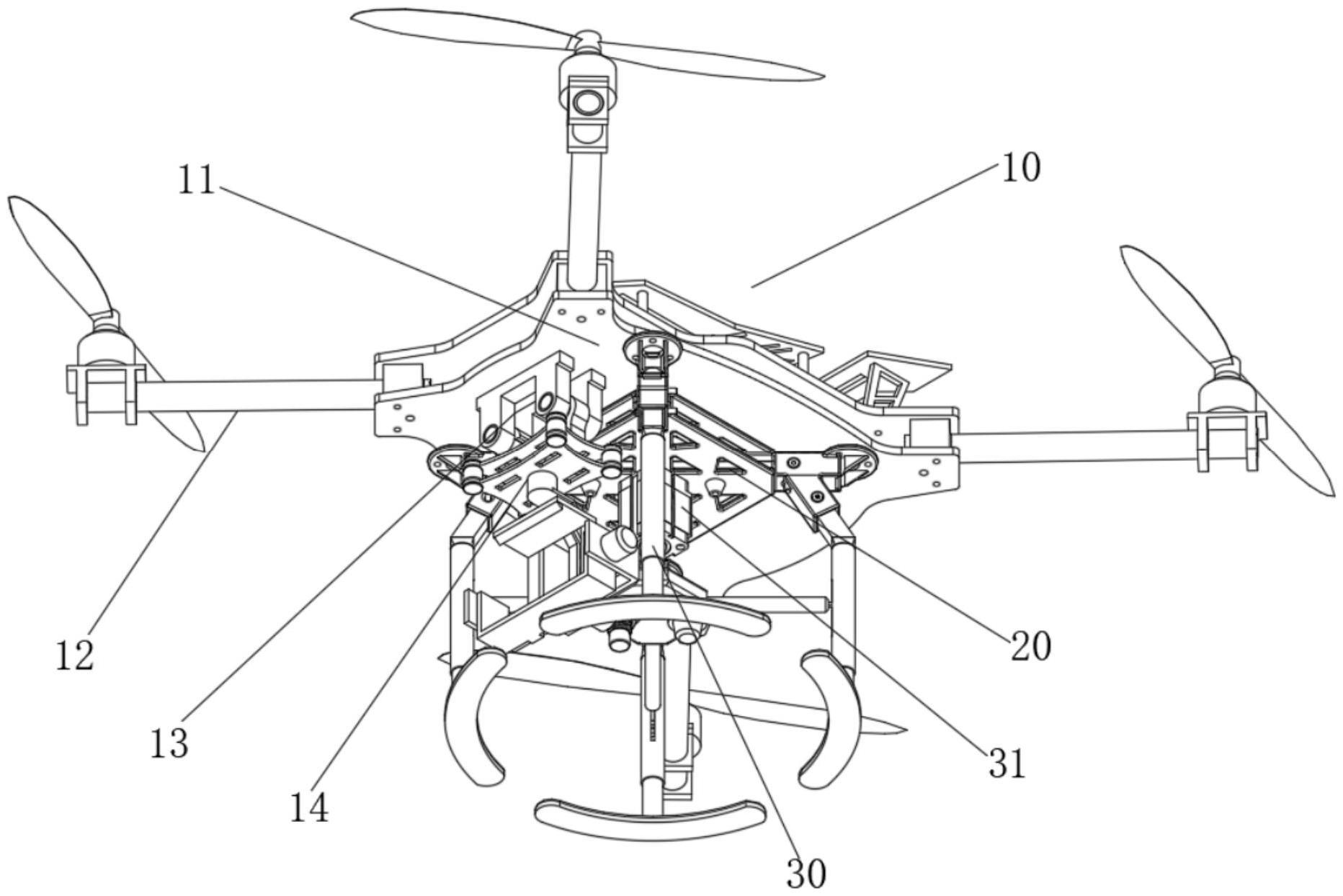
9、进一步优选的,所述无人机机构还包括四个飞行翼、支架和摄像头架;
10、四个所述飞行翼安装于机体的四侧,所述支架螺丝连接于机体的底部边侧,所述摄像头架通过螺丝连接于支架的底部,四个所述v型连接件的边侧均固定连接有固定帽,所述固定帽通过螺丝连接于机体的底部四侧。
11、进一步优选的,所述活塞头的外壁滑动连接于外撑管的内侧壁。
12、本实用新型实施例由于采用以上技术方案,其具有以下优点:
13、本实用新型当无人机发生着陆时,减振机构会感知到振动信号,通过压力传感器和加速度计监测振动强度,可迅速响应着陆情况,减少起落过程中的冲击和振动,通过活塞减振机构将机体的振动能量转化为动能,实现能量的有效利用,通过活塞头的往复运动,振动能量逐步被转化为动能,并通过滑块和平衡杆的协同作用分散消耗,橡胶头在活塞头的压力下会发生变形,该变形过程储存了一部分振动能量,从而实现振动吸能的效果,在活塞头向上运动时,橡胶头的弹性将释放之前储存的能量,该能量的释放在起落过程中逐渐减弱,从而起到了缓冲和减振的作用。
14、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种无人机起落减振结构,其特征在于:包括
2.根据权利要求1所述的一种无人机起落减振结构,其特征在于:所述外撑管(38)的外侧壁开设有滑槽(381),所述滑块(34)的外壁嵌入并滑动连接于滑槽(381)的内壁。
3.根据权利要求1所述的一种无人机起落减振结构,其特征在于:所述内撑管(39)的底端固定连接有底撑座(311),所述底撑座(311)呈弧形设置。
4.根据权利要求1所述的一种无人机起落减振结构,其特征在于:所述无人机机构(10)还包括四个飞行翼(12)、支架(13)和摄像头架(14);
5.根据权利要求1所述的一种无人机起落减振结构,其特征在于:四个所述v型连接件(22)的边侧均固定连接有固定帽(23),所述固定帽(23)通过螺丝连接于机体(11)的底部四侧。
6.根据权利要求1所述的一种无人机起落减振结构,其特征在于:所述活塞头(35)的外壁滑动连接于外撑管(38)的内侧壁。
技术总结
本技术提供了一种无人机起落减振结构,包括减振机构,所述微型缸的顶部螺丝连接于底撑架的底部,所述平衡板的顶部固定于微型缸的输出轴端。本技术当无人机发生着陆时,减振机构会感知到振动信号,通过压力传感器和加速度计监测振动强度,可迅速响应着陆情况,减少起落过程中的冲击和振动,通过活塞减振机构将机体的振动能量转化为动能,实现能量的有效利用,并通过滑块和平衡杆的协同作用分散消耗,橡胶头在活塞头的压力下会发生变形,该变形过程储存了一部分振动能量,从而实现振动吸能的效果,在活塞头向上运动时,橡胶头的弹性将释放之前储存的能量,该能量的释放在起落过程中逐渐减弱,从而起到了缓冲和减振的作用。
技术研发人员:祝晓光,张振
受保护的技术使用者:天津天航智远科技有限公司
技术研发日:20230830
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!