一种无人机调试平台的制作方法
本发明涉及无人机试验,具体设计一种无人机调试平台。
背景技术:
1、由于无人机各项相关技术的快速发展,使得无人机在多个领域得到了广泛使用,如:户外地质探测、远程运输、全景航拍、农业喷洒农药等方面。无人机有着广阔的应用市场,因此不同类型不同用途的无人机被设计和研发。
2、然而,在实际研发和测试无人机的过程中,由于调试平台种类的较少,在现有技术中,针对无人机的试验仅能完成俯仰、横滚和偏航角在固定点的测试,无法完成无人机在空中任意点的飞行测试。因此,在调试过程中,无人机运动类型单一,无法完全测试出无人机的真实性能,使得无人机的调试过程缓慢。
3、所以,需要设计一种能够调试无人机多种飞行姿态的无人机调试平台。
技术实现思路
1、本发明的目的在于提供一种无人机调试平台,以解决上述背景技术中提出的问题,能够调试各类无人机的多种飞行状态,提高试验种类的多样性。
2、如上构思,本发明提供一种无人机调试平台,包括:固定无人机平台、柱体装置、电气装置、控制开关;其中:所述固定无人机平台上表面固定无人机,下表面连接无人机连接线或连接杆;所述柱体装置包括承接板,所述承接板中间有孔可以通过无人机连接线或连接杆,所述承接板安装在承接平台上表面,所述承接板下表面由承接杆支撑,所述承接平台安装在立柱上表面,所述承接平台上表面安装承接板,所述承接平台四个侧面均有两个孔来安装承接杆,所述承接杆安装在承接平台的侧面且上部支撑承接板,所述立柱的上部安装有承接平台,所述立柱的内部有立柱内部通道,所述立柱的下部侧面安装有定滑轮,所述立柱的下表面安装在底部支撑的上表面,所述立柱内部通道在立柱内部,所述立柱内部通道可以使无人机连接线或连接杆通过,所述定滑轮安装在立柱侧面的下部,所述底部支撑安装在立柱的下部;所述电气装置包括电机,所述电机安装在电气平台上,所述电机的一头连接连线柱,所述连线柱安装在电气平台上,所述连线柱为圆柱体且其一端连接电机,所述连线柱的另一端连接编码器,所述连线柱的柱面缠绕有无人机连接线,所述编码器安装在连线柱的一端,所述电气平台上面安装有电机、连线柱和电气控制装置,所述电气控制装置安装在电气平台上,所述电气控制装置侧面连接有电源插头和控制连接线,所述电源插头由电线连接电气控制装置,所述控制连接线一端连接电气控制装置,所述控制连接线另一端连接控制开关;所述控制开关由控制连接线与电气控制装置连接,所述控制开关安装有快速按钮、停止按钮、慢速按钮等三个按钮。
3、优选地,所述固定无人机平台的上表面固定无人机,中部连接无人机连接线或连接杆,使无人机飞行调试的时候,能有多种飞行姿态。固定无人机平台为栅格状结构,便于固定各种类型的无人机。
4、优选地,所述承接板由承接平台和承接杆支撑,使用无人机连接线连接无人机调试的时候,如果无人机失控或飞行速度为零时,要确保无人机降落在承接板上,同时承接板上表面应选用比较柔软的材质。要使承接板大小和无人机连接线的长度相适应,在调试过程中,不能使无人机的垂直降落点在承接板以外的区域。承接板和承接平台的正中间有通过上下两个面的圆孔。
5、优选地,所述无人机连接线一头固定且缠绕在连线柱上,分别经过定滑轮和立柱内部通道,另一头固定在固定无人机平台的中心位置。所述定滑轮安装在立柱侧面下部的凹槽里面,凹槽与立柱内部通道相连。
6、优选地,所述立柱内部通道为圆柱形通道,立柱内部通道的截面的直径,要大于承接板和承接平台正中间的孔,同时立柱内部通道的水平截面与承接板和承接平台的圆孔,三者的圆心同轴。
7、优选地,所述电机一般使用两项电机,电机、连线柱和编码器,三者同轴心;电机转动时候带动连线柱转动,使连线柱的柱面缠绕无人机连接线,同时编码器记录电机的转数。
8、优选地,所述电气控制装置能够设定电机转动的圈数,根据调试无人机时,无人机连接线的长度,设定电机转动的最大圈数。当电机转动到设定的最大圈数时,能使电机自动停止转动。
9、优选地,所述控制开关上有快速按钮、停止按钮、慢速按钮等三个按钮,能分别控制电机的快速、慢速或停止运行。停止按钮按下后,电机停止运行,且按钮不会自动再升起;需要再按一下停止按钮,使停止按钮恢复原状使,才能使电机继续运行;电机快速或者慢速运行为两种互斥的运行状态,快速按钮按下时,电机只能快速运行,慢速按钮按下时,电机只能慢速运行。
10、与现有的技术相比,本发明有如下有益效果:
11、(1)本发明提供的无人机调试装置,不仅能够使无人机在定点或定高进行调试,还能够使无人机在空中任意点飞行,调试其飞行状态。
12、(2)本发明提供的无人机调试装置,无人机在空中飞行调试时,如果飞行不受控制时,可以通过控制电机的转动拉回无人机;无人机在空中调试过程中,如果无人机突然失控降落,那么可以使用承接板接住无人机,减少无人机坠落造成的损坏。
技术特征:
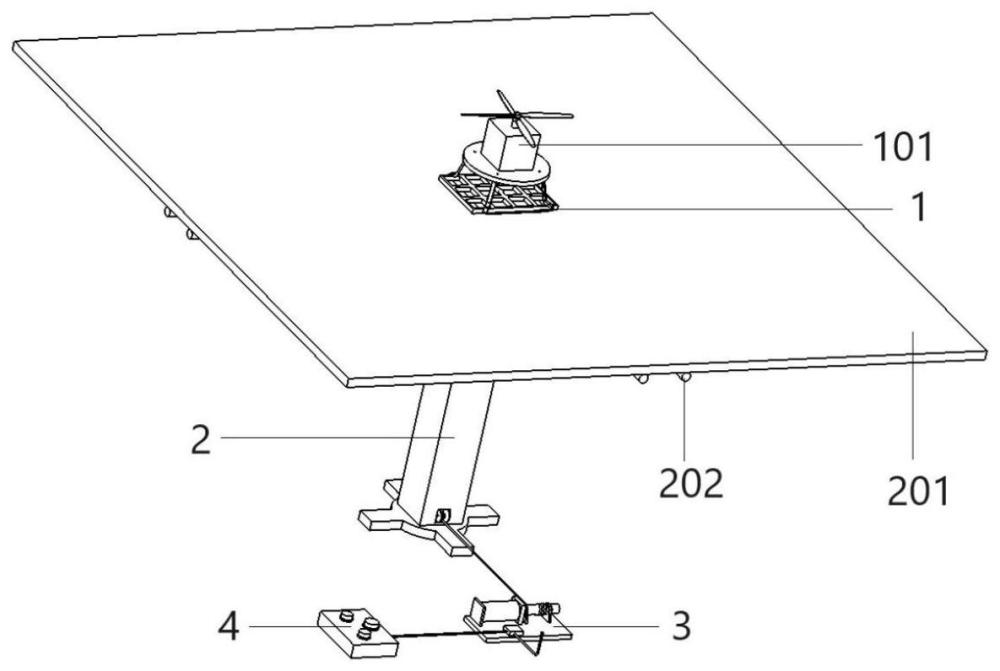
1.一种无人机调试平台,包括:固定无人机平台1、柱体装置2、电气装置3、控制开关4;其中:所述固定无人机平台1上表面固定无人机101,下表面连接无人机连接线308或连接杆102;所述柱体装置2包括承接板201,所述承接板201中间有孔可以通过无人机连接线308或连接杆102,所述承接板201安装在承接平台203上表面,所述承接板201下表面由承接杆202支撑,所述承接平台203安装在立柱205上表面,所述承接平台203上表面安装承接板201,所述承接平台203四个侧面均有两个孔来安装承接杆202,所述承接杆202安装在承接平台203的侧面且上部支撑承接板201,所述立柱205的上部安装有承接平台203,所述立柱205的内部有立柱内部通道206,所述立柱205的下部侧面安装有定滑轮207,所述立柱205的下表面安装在底部支撑208的上表面,所述立柱内部通道206在立柱205内部,所述立柱内部通道206可以使无人机连接线308或连接杆102通过,所述定滑轮207安装在立柱205侧面的下部,所述底部支撑208安装在立柱205的下部;所述电气装置3包括电机301,所述电机301安装在电气平台307上,所述电机301的一头连接连线柱302,所述连线柱302安装在电气平台307上,所述连线柱302为圆柱体且其一端连接电机301,所述连线柱302的另一端连接编码器303,所述连线柱302的柱面缠绕有无人机连接线308,所述编码器303安装在连线柱302的一端,所述电气平台307上面安装有电机301、连线柱302和电气控制装置305,所述电气控制装置305安装在电气平台307上,所述电气控制装置305侧面连接有电源插头304和控制连接线306,所述电源插头304由电线连接电气控制装置305,所述控制连接线306一端连接电气控制装置305,所述控制连接线306另一端连接控制开关4;所述控制开关4由控制连接线306与电气控制装置305连接,所述控制开关4安装有快速按钮401、停止按钮402、慢速按钮403等三个按钮。
2.根据权利要求1所述的一种无人机调试平台,其特征在于,所述固定无人机平台1的上表面固定无人机101,中部连接无人机连接线308或连接杆102,使无人机101飞行调试的时候,能有多种飞行姿态,固定无人机平台1为栅格状结构。
3.根据权利要求1所述的一种无人机调试平台,其特征在于,所述所述承接板201由承接平台203和承接杆202支撑,使用无人机连接线308连接无人机101调试的时候,如果无人机101失控或飞行速度为零时,要确保无人机101降落在承接板201上,同时承接板201上表面应选用比较柔软的材质,要使承接板201大小和无人机连接线308的长度相适应,在调试过程中,不能使无人机101的垂直降落点在承接板201以外的区域,承接板201和承接平台203的正中间有通过上下两个面的圆孔。
4.根据权利要求1所述的一种无人机调试平台,其特征在于,所述无人机连接线308一头固定且缠绕在连线柱302上,分别经过定滑轮207和立柱内部通道206,另一头固定在固定无人机平台1的中心位置,所述定滑轮207安装在立柱205侧面下部的凹槽里面,凹槽与立柱内部通道206相连。
5.根据权利要求1所述的一种无人机调试平台,其特征在于,所述立柱内部通道206为圆柱形通道,立柱内部通道206的截面直径,要大于承接板201和承接平台203正中间的孔,同时立柱内部通道206的水平截面与承接板201和承接平台203的圆孔,三者的圆心同轴。
6.根据权利要求1所述的一种无人机调试平台,其特征在于,所述电机301一般为两项电机,电机301、连线柱302和编码器303,三者同轴心;电机301转动时候带动连线柱302转动,使连线柱302的柱面缠绕无人机连接线308,同时编码器303记录电机301的转数。
7.根据权利要求1所述的一种无人机调试平台,其特征在于,所述电气控制装置305能够设定电机301转动的圈数,根据调试无人机101时,无人机连接线308的长度,设定电机301转动的最大圈数,当电机301转动到设定的最大圈数时,能使电机301自动停止转动。
8.根据权利要求1所述的一种无人机调试平台,其特征在于,所述控制开关4上有快速按钮401、停止按钮402、慢速按钮403等三个按钮,能分别控制电机301的快速、慢速或停止运行,停止按钮按402下后,电机301停止运行,且按钮不会自动再升起;需要再按一下停止按钮402,使停止按钮402恢复原状使,才能使电机301继续运行;电机301快速或者慢速运行为两种互斥的运行状态,快速按钮按401下时,电机301只能快速运行,慢速按钮403按下时,电机301只能慢速运行。
技术总结
本发明公开了一种无人机调试平台,不仅能完成俯仰、横滚和偏航在固定点的测试,也能够完成无人机在空中任意点的飞行测试,增加了无人机调试的种类和飞行状态。调试无人机在空中飞行调试时,如果无人机失控能够快速使无人机返回起点,减少失控状态下无人机的损伤。本发明用于对无人机系统的多种飞行状态和性能均可进行调试,同时也能确保试验过程的安全。
技术研发人员:石敏,李剑,成磊,马川
受保护的技术使用者:列宿(苏州)智能科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!