基于精确算法的最佳拟合系统及其操作方法与流程
本发明涉及校准,具体地,涉及一种基于精确算法的最佳拟合系统及其操作方法。
背景技术:
1、最佳拟合系统的作业类型从实际来看与之最相近的是校准作业,目前常见的校准作业方案主要有两种。
2、一是利用同类型的准确度高的标准仪器来校准。校准的时候,标准仪器和被校仪器同时测量由可调信号源输出的一个信号,标准仪器上的输出作为真值,它与被校仪器的测量值之间的差值即为被校仪器的测量误差。由小到大的改变信号源的输出,就可以获得在所有测量点上的校准值。二是采用准确度高的可步进调节输出值的标准信号源校准的时候,信号源的示值作为真值,它与被校仪器示值的差值就是该被校仪器的测量误差。从小到大调节标准信号源的输出,就可以得到被校仪器在所有的测量点上的校准值。
3、但以上二种方案都需由专业人员手动操作,使用极为不便。同时,存在对物体空间位置定位困难且定位精度差,承载产品的平台站位无法同时进行垂直方向和水平方向移动,固定着大型或精密产品的平台移动困难以及倾斜物体无法固定的问题。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种基于精确算法的最佳拟合系统及其操作方法。
2、根据本发明提供的一种基于精确算法的最佳拟合系统,所述方案如下:
3、第一方面,提供了一种基于精确算法的最佳拟合系统,所述系统包括:激光跟踪仪、拟合站位、反射器以及多个控制器,所述激光跟踪仪、拟合站位均与控制器通过有线方式连接;
4、所述反射器分别分布在拟合站位和系统的飞机水平尾翼上,并且由激光跟踪仪接收反射器传达的空间坐标信息;
5、所述拟合站位包括下部底座部分、中间运动部分和上部固定部分,其中,所述上部固定部分和中间运动部分,以及中间运动部分和下部底座部分彼此之间,均为可移动设置;
6、所述控制器将激光跟踪仪收集到的拟合站位的反射器坐标信息作为参照点,将激光跟踪仪收集到的飞机水平尾翼的反射器坐标信息与理论位置进行比对,并驱动拟合站位不断运动调整直到飞机水平尾翼达到最佳拟合的理论位置。
7、优选地,所述拟合站位的下部底座部分包括:主型架、滑动机构及电缆拖链;所述滑动机构安装在主型架上,通过电缆拖链连接到控制器并由电机驱动带动运载平台作z轴方向的运动。
8、优选地,所述滑动机构包括滚珠丝杠、导轨以及与导轨相互配合的滑块;其中,所述导轨通过紧固件固定在主型架上,滑块位于运载平台底部安置在导轨上,滚珠丝杠通过电缆拖链连接到控制器上并由电机驱动带动运载平台作z轴方向的运动。
9、优选地,所述拟合站位的中间运动部分包括:运载平台、电机及多个作动器;
10、其中,作动器由电机驱动并通过螺钉固定在运载平台上,运载平台通过底部滑块安置在导轨上,并由滚珠丝杠提供动力。
11、优选地,所述每个作动器都有一个电机驱动。
12、优选地,所述拟合站位的上部固定部分包括:球窝接头、横梁框架、硬点支撑、真空吸盘和真空系统;
13、其中,横梁框架通过球窝接头与作动器相连,并在作动器的动力作用下进行x和y轴的运动,硬点支撑作为飞机水平尾翼放置位置的参照工具和真空吸盘都通过螺钉分别固定在横梁框架的侧面和顶部,并且真空吸盘通过真空系统与控制器相连。
14、第二方面,提供了一种基于精确算法的最佳拟合系统的操作方法,所述方法包括:
15、步骤s1:飞机水平尾翼通过agv吊装工具和定位工具硬点支撑放置在横梁框架上的理论位置,通过所述控制器启动真空系统使真空吸盘产生吸附力固定住飞机水平尾翼;
16、步骤s2:所述控制器会根据人工下达的指令,将运载平台在滚珠丝杠的动力驱动下沿z轴运动送至控制器系统内设置的预最佳拟合位置;
17、步骤s3:将所述反射器分别安装在拟合站位和飞机水平尾翼所规定的位置,并且激光跟踪仪将两个部分分布的反射器位置坐标传达到控制器中,控制系统能自动计算出飞机水平尾翼相对于拟合站位的位置;
18、步骤s4:通过获得的飞机水平尾翼和拟合站位的坐标,系统通过算法计算达到最佳拟合理论位置所需的轨迹并生成指令方案;
19、步骤s5:系统将生成的指令方案传达给控制器驱动电机移动和调整作动器,即x和y轴方向的运动,从而带动横梁框架的运动,使飞机水平尾翼到达该指令方案的理论位置。
20、优选地,所述真空吸盘内置真空传感器,检测飞机水平尾翼真空吸附状态。
21、优选地,将所述理论位置保存,对于后面需要进行拟合调整的飞机水平尾翼只需点击此指令方案按钮,就能够到达最佳拟合位置。
22、第三方面,提供了一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现所述基于精确算法的最佳拟合系统的操作方法中的步骤。
23、与现有技术相比,本发明具有如下的有益效果:
24、1、通过采用激光跟踪仪收集反射器位置坐标的方式,解决了物体空间位置定位困难且定位精度差的问题,通过激光跟踪仪自动测量,将数据传导入控制器,整个过程中全自动信息采集录入,减少人工手工测量误差以及信息传导误差;
25、2、通过采用作动器,解决了承载产品的平台站位无法同时进行垂直方向和水平方向移动的问题;
26、3、通过采用滚珠丝杠可以精确的定位移动平台的位置,相较于大型气缸,大型气缸往往仅有初始和结束两个作业位置,然而采用滚珠丝杠可以随时在各个位置停止、移动,而且精度更高,满足了平台在z轴上多次拟合移动的需求,免去了固定着大型或精密产品的平台移动困难的问题;
27、4、通过采用真空吸盘,解决了倾斜物体无法固定的问题。
28、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
技术特征:
1.一种基于精确算法的最佳拟合系统,其特征在于,包括:激光跟踪仪(1)、拟合站位(3)、反射器(4)以及多个控制器,所述激光跟踪仪(1)、拟合站位(3)均与控制器连接;
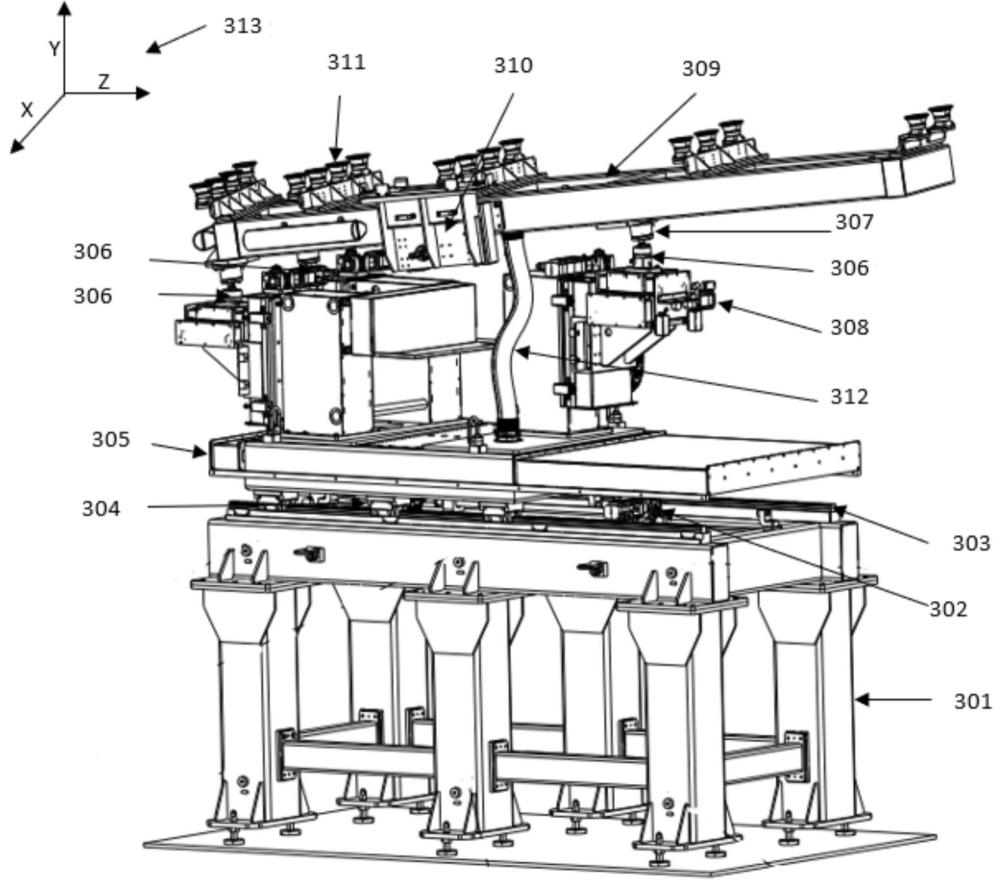
2.根据权利要求1所述的基于精确算法的最佳拟合系统,其特征在于,所述拟合站位(3)的下部底座部分包括:主型架(301)、滑动机构及电缆拖链(304);所述滑动机构安装在主型架(301)上,通过电缆拖链(304)连接到控制器并由电机(308)驱动带动运载平台(305)作z轴方向的运动。
3.根据权利要求2所述的基于精确算法的最佳拟合系统,其特征在于,所述滑动机构包括滚珠丝杠(302)、导轨(303)以及与导轨(303)相互配合的滑块;其中,所述导轨(303)通过紧固件固定在主型架(301)上,滑块位于运载平台(305)底部安置在导轨(303)上,滚珠丝杠(302)通过电缆拖链(304)连接到控制器上并由电机(308)驱动带动运载平台(305)作z轴方向的运动。
4.根据权利要求3所述的基于精确算法的最佳拟合系统,其特征在于,所述拟合站位(3)的中间运动部分包括:运载平台(305)、电机(308)及多个作动器(306);
5.根据权利要求4所述的基于精确算法的最佳拟合系统,其特征在于,所述每个作动器(306)都有一个电机(308)驱动。
6.根据权利要求4所述的基于精确算法的最佳拟合系统,其特征在于,所述拟合站位(3)的上部固定部分包括:球窝接头(307)、横梁框架(309)、硬点支撑(310)、真空吸盘(311)和真空系统(312);
7.一种基于精确算法的最佳拟合系统的操作方法,基于权利要求1-6任意一项所述的基于精确算法的最佳拟合系统,其特征在于,包括:
8.根据权利要求7所述的基于精确算法的最佳拟合系统的操作方法,其特征在于,所述真空吸盘(311)内置真空传感器,检测飞机水平尾翼(2)真空吸附状态。
9.根据权利要求7所述的基于精确算法的最佳拟合系统的操作方法,其特征在于,将所述理论位置保存,对于后面需要进行拟合调整的飞机水平尾翼(2)只需点击此指令方案按钮,就能够到达最佳拟合位置。
10.一种存储有计算机程序的计算机可读存储介质,其特征在于,所述计算机程序被处理器执行时实现权利要求7至9中任一项所述基于精确算法的最佳拟合系统的操作方法中的步骤。
技术总结
本发明提供一种基于精确算法的最佳拟合系统及其操作方法,包括:激光跟踪仪、拟合站位、反射器以及多个控制器,激光跟踪仪、拟合站位均与控制器通过有线方式连接;反射器分别分布在拟合站位和系统的飞机水平尾翼上,并且由激光跟踪仪接收反射器传达的空间坐标信息;拟合站位包括下部底座部分、中间运动部分和上部固定部分;控制器将激光跟踪仪收集到的拟合站位的反射器坐标信息作为参照点,将激光跟踪仪收集到的飞机水平尾翼的反射器坐标信息与理论位置进行比对,并驱动拟合站位不断运动调整直到飞机水平尾翼达到最佳拟合的理论位置。本发明能够解决物体空间位置定位困难且定位精度差、倾斜物体无法固定,以及平台移动困难等问题。
技术研发人员:李晶,姜益昊,王启任,邹冀华,桑成思,赵丹,杨金贺,姜喜明,鞠波,朱天
受保护的技术使用者:埃瑞泰克斯(上海)机械制造有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!