一种无人机的机械臂连接结构
本发明涉及机械臂,更具体地说,本发明涉及一种无人机的机械臂连接结构。
背景技术:
1、机械臂广泛应用于半导体制造、工业、医疗、军事以及太空探索领域,机械臂能够接受指令,精确地定位到三维空间上的某一点进行作业;在现有技术中,多旋翼无人机是一种利用前飞时的相对气流吹动旋翼自转以产生升力的旋翼航空器,它的前进力由发动机带动螺旋桨直接提供;目前国内外机械臂的高空作业无法自由运作且操作繁琐,机械臂就只能在平板或某个特定范围内执行任务,不能在多个环境内进行作业,并且只能被动的接受任务,如果能够将旋翼机运用于机械臂的运行,则可以进一步的提高机械臂操控的自由度,极大限度的发挥机械臂的作用。
2、在现有技术中,通过无人机底部安装机械臂,以使得机械臂在高空作业中能够进行作业,而已知的是,在无人机底部通常设置有起落架,在无人机起落时需要配合起落架进行起落,从而为了避免机械臂对起落架的支撑造成影响,通常机械臂需要折叠在机体以下起落架以上,为了减轻机械臂整体的负重,保障无人机的稳定运行,从而导致机械臂整体尺寸得以限制,从而使得机械臂从无人机底部的伸出进行工作的范围得以限制;
3、从而使得在无人机配合机械臂进行工作时,为避免无人机受到外界环境阻挡,机械臂需要伸出,而机械臂伸出的长度有限,从而影响高空作业中机械臂的工作范围,因此,现提出一种能够不增加机械臂整体尺寸,避免负重提高,且能够提高机械臂工作范围的无人机的机械臂连接结构。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种无人机的机械臂连接结构,以解决上述背景技术中提出的问题。
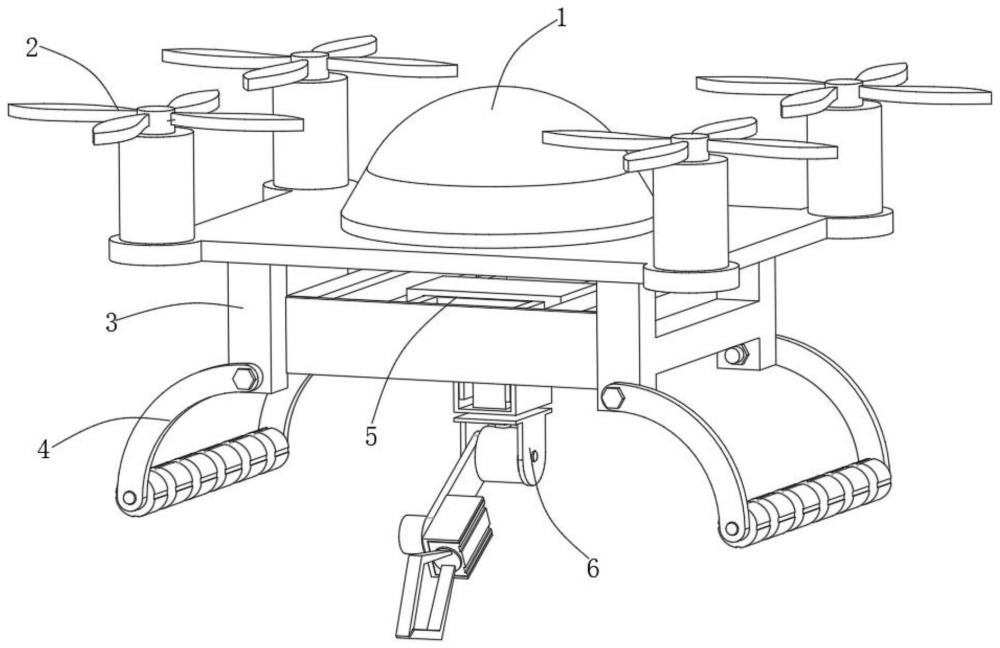
2、为实现上述目的,本发明提供如下技术方案:一种无人机的机械臂连接结构,包机体、机翼、底架以及起落架,所述机体顶端安装机翼,所述机体底端安装有底架,所述底架底端对称安装有起落架,所述底架内侧对称安装有内撑板,各所述内撑板内侧均安装有滑轨,所述内撑板和滑轨前端共同连接有前栓板,所述内撑板和滑轨后端共同连接有后挡板,所述后挡板和前栓板共同支撑有调距机构,所述调距机构与两个滑轨滑动配合,且调距机构底端安装有机械臂本体。
3、在利用本无人机安装的机械臂进行工作时,在无人机行进到飞行限制位置,机械臂与作业物体具有一定距离时,通过驱动电机的运行,能够使得丝杆进行转动,从而使得滑块在上滑板和下拖板与两个滑轨滑动配合下,能够使得滑块进行移动,从而使得下拖板拖动底部的机械臂本体进行移动,使得机械臂本体能够伸出机体底部更远的距离,从而方便电驱夹抓能够对作业物体进行夹持,而在机械臂本体对作业物体进行夹持时,通过第一无刷电机的运行,能够使得旋转臂进行转动,从而能够使得底部的电驱夹抓随着进行转动,从而在不调整连接臂的情况下,能够对电驱夹抓的位置进行调整,从而使得机体滞空时,对电驱夹抓进行前后位置调换,而第二无刷电机运行时,能够对连接臂进行上下高度位置摆动调整,从而能够调整电驱夹抓所处高度,而连接臂端部的旋转电机转动时,能够对电驱夹抓的夹持方向进行调整,从而使得电驱夹抓配合无人机对作业物体进行夹持,完成夹持作业,在整个对机械臂作业范围进行调整的过程中,仅仅对机械臂的安装固定位置进行移动调整,从而能够对机械臂的作业范围进行调整,不需对机械臂内壁的各个臂长进行尺寸增长,从而降低了机械臂本体对无人机产生的负重,从而提高无人机内部电池所能够使用的时间,提高作业使用时间。
4、优选地,所述内撑板内侧设置有凸板,滑轨外侧设置有凹槽,所述凸板与凹槽滑动配合。
5、优选地,所述滑轨上下两面边缘均开设有滑槽,调距机构与滑槽滑动配合。
6、优选地,所述调距机构包括驱动电机,所述驱动电机安装在后挡板上;
7、丝杆,所述丝杆一端与驱动电机输出端连接,丝杆另一端转动连接在前栓板上;
8、滑块,所述滑块套接在丝杆上,且滑块处于两个滑轨之间;
9、上滑板,所述上滑板栓接在滑块顶端,且上滑板两端底部分别与对应的滑轨顶面开设的滑槽滑动配合;
10、下拖板,所述下拖板栓接在滑块底端,且下拖板两端顶部分别与对应的滑轨底面开设的滑槽滑动配合。
11、优选地,所述下拖板底端对称焊接有固定板,两个所述固定板与机械臂本体顶端连接。
12、优选地,所述机械臂本体包括固定架,所述固定架栓接两个固定板底部;
13、第一无刷电机,所述第一无刷电机安装在固定架上;
14、旋转臂,所述旋转臂安装在第一无刷电机输出端;
15、第二无刷电机,所述第二无刷电机安装在旋转臂底端;
16、连接臂,所述连接臂安装在第二无刷电机输出端;
17、旋转组件,所述旋转组件安装在连接臂底端;
18、电驱夹抓,所述电驱夹抓安装在旋转组件上。
19、优选地,所述旋转组件包括旋转电机,所述旋转电机安装在连接臂底端一侧;
20、旋转架,所述旋转架安装在旋转电机输出端。
21、优选地,所述旋转架设置在连接臂底端另一侧,且电驱夹抓安装在旋转架上。
22、优选地,所述旋转臂底端所处水平面在起落架底部所处平面的上方。
23、本发明的技术效果和优点:
24、1、通过内撑板、滑轨、后挡板、前栓板以及用于连接机械臂的调距机构安装配合的设置,与现有技术相比,通过对前挡板和前栓板进行拆卸,即可对机械臂整体连接的结构从无人机上进行拆卸,整体拆卸方便,安装简单,从而使得无人机能够单独存放,或对无人机进行其他作业时,单独飞行,减轻负重;
25、2、通过驱动电机、丝杆、滑块、上滑板以及用于连接机械臂的下拖板的设置,与现有技术相比,通过驱动电机运行,能够使得丝杆进行转动,从而使得滑块在栓接的上滑板和下拖板与两个滑轨滑动配合下,使得滑块底端的下拖板能够拖动底部的机械臂本体进行移动,从而能够延长机体一个方位的机械臂的延伸范围,从而提高机械臂的作业范围,在整个对机械臂作业范围进行调整的过程中,仅仅对机械臂的安装固定位置进行移动调整,从而能够对机械臂的作业范围进行调整,不需对机械臂内壁的各个臂长进行尺寸增长,从而降低了机械臂本体对无人机产生的负重,从而提高无人机内部电池所能够使用的时间,提高作业使用时间。
26、3、通过固定架、第一无刷电机、旋转臂、第二无刷电机、连接臂、旋转电机、旋转架以及电驱夹抓的设置,与现有的技术相比,在机械臂内部对电驱夹抓进行调整时,能够通过配合的第一无刷电机对电驱夹抓处于无人机前后作业位置进行自动调换,配合第二无刷电机能够对电驱夹抓所处夹持位置高度进行调整,而配合旋转电机和旋转架的设置,能够对电驱夹抓的夹持方向进行摆正,从而能够更方便的对作业物体进行夹持,提高作业效率。
技术特征:
1.一种无人机的机械臂连接结构,包机体(1)、机翼(2)、底架(3)以及起落架(4),所述机体(1)顶端安装机翼(2),所述机体(1)底端安装有底架(3),所述底架(3)底端对称安装有起落架(4),其特征在于:所述底架(3)内侧对称安装有内撑板(7),各所述内撑板(7)内侧均安装有滑轨(8),所述内撑板(7)和滑轨(8)前端共同连接有前栓板(10),所述内撑板(7)和滑轨(8)后端共同连接有后挡板(9),所述后挡板(9)和前栓板(10)共同支撑有调距机构(5),所述调距机构(5)与两个滑轨(8)滑动配合,且调距机构(5)底端安装有机械臂本体(6)。
2.根据权利要求1所述的一种无人机的机械臂连接结构,其特征在于:所述内撑板(7)内侧设置有凸板,滑轨(8)外侧设置有凹槽,所述凸板与凹槽滑动配合。
3.根据权利要求2所述的一种无人机的机械臂连接结构,其特征在于:所述滑轨(8)上下两面边缘均开设有滑槽,调距机构(5)与滑槽滑动配合。
4.根据权利要求3所述的一种无人机的机械臂连接结构,其特征在于:所述调距机构(5)包括驱动电机(501),所述驱动电机(501)安装在后挡板(9)上;
5.根据权利要求4所述的一种无人机的机械臂连接结构,其特征在于:所述下拖板(505)底端对称焊接有固定板,两个所述固定板与机械臂本体(6)顶端连接。
6.根据权利要求5所述的一种无人机的机械臂连接结构,其特征在于:所述机械臂本体(6)包括固定架(601),所述固定架(601)栓接两个固定板底部;
7.根据权利要求6所述的一种无人机的机械臂连接结构,其特征在于:所述旋转组件(606)包括旋转电机(6061),所述旋转电机(6061)安装在连接臂(605)底端一侧;
8.根据权利要求7所述的一种无人机的机械臂连接结构,其特征在于:所述旋转架(6062)设置在连接臂(605)底端另一侧,且电驱夹抓(607)安装在旋转架(6062)上。
9.根据权利要求8所述的一种无人机的机械臂连接结构,其特征在于:所述旋转臂(603)底端所处水平面在起落架(4)底部所处平面的上方。
技术总结
本发明公开了一种无人机的机械臂连接结构,具体涉及机械臂领域,包机体、机翼、底架以及起落架,所述机体顶端安装机翼,所述机体底端安装有底架,所述底架底端对称安装有起落架,所述底架内侧对称安装有内撑板,各所述内撑板内侧均安装有滑轨,所述内撑板和滑轨前端共同连接有前栓板,所述内撑板和滑轨后端共同连接有后挡板,所述后挡板和前栓板共同支撑有调距机构,所述调距机构与两个滑轨滑动配合,且调距机构底端安装有机械臂本体。本发明具有能够在不调整机械臂整体尺寸的情况下,能够延长机械臂的作业范围,从而降低整个无人机所受负重,提高工作维持时间,且便于对机械臂的夹持角度进行调整,使得机械臂作业更加方便的优点。
技术研发人员:周祖鹏,陈帅
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!