一种自动进料机构的制作方法
1.本实用新型涉及一种自动化设备,具体涉及一种自动进料机构。
背景技术:
2.磁路组件是电声器件的重要组成部分,主要用于构建一个稳定、持续的永磁场,如图1所示,通常包括外壳、磁石和极片依次堆叠并胶粘连接。现有装配工艺中,主要通过人工手动完成,难以保证涂胶量、同轴度等参数,产品质量不稳定。
3.本实用新型的目的即是提供用于一种磁路组件装配的制动进料机构。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种自动进料机构,对零部件进行自动分拣,并通过转运组件进料,提高生产效率,降低生产成本。
5.为了解决上述技术问题,本实用新型提供的技术方案如下:一种自动进料机构,包括机架,所述的机架上设有分拣输料组件和转运组件,所述的分拣输料组件包括分拣装置;所述的转运组件包括吸附单元、驱动吸附单元水平运动的水平转运单元,及驱动吸附单元竖直运动的竖直转运单元。
6.分拣输料组件用于对零部件进行分拣操作,并输送至转运组件,通过转运组件进行进料操作,提高了生产效率,降低了生产成本。
7.作为优选,所述的吸附单元包括采用负压吸附模式工作的吸附头。
8.由于本申请主要应用于电声器件,不适用电磁铁吸附,同时由于尺寸较小,也不适用直接夹持。负压吸附模式可以在保证夹持可靠性的基础上,减小对零部件磁场的影响。
9.作为优选,所述的分拣装置为振动盘;所述的分拣输料组件还包括输料通道,所述输料通道的入口端与振动盘对应,出口端与转运组件对应。振动盘用于零部件的分拣操作,输料通道用于零部件的引导输送。
10.作为优选,所述的水平转运单元包括与机架沿水平方向滑动连接的转运基座,所述的机架上还设有驱动转运基座相对于机架滑动的第一驱动装置;所述的吸附单元设置在转运基座上。
11.作为优选,所述的吸附单元与转运基座沿竖直方向滑动连接;所述的竖直转运单元包括驱动吸附单元相对于转运基座滑动的第二驱动装置。
12.水平转运单元和竖直转运单元共同完成吸附单元的转运,同时实现零部件的进料操作。
13.作为优选,还包括翻转机构,所述的翻转机构包括翻转轴及驱动翻转轴转动的第三驱动装置,所述翻转轴的旋转中心平行于水平方向;所述的翻转轴上设有两个并行设置的夹持臂,两个夹持臂之间形成翻转空间。
14.需要翻转的零部件放入翻转空间内,并伴随翻转轴转动,实现翻转操作。在电声器件的组装过程中,至少有一个零部件需要涂胶后翻转。通常为外壳在涂胶后翻转,最后与磁
石粘接。
15.作为优选,还包括至少两个与翻转空间对应的水平推送单元。
16.作为优选,所述的水平推送单元包括与机架沿水平方向滑动的推送臂,及驱动推送臂相对于机架滑动的第四驱动装置。
17.其中一个水平推送单元用于将零部件推送入翻转空间,另一个水平推送单元用于在翻转完成后将零部件从推送空间内推出。
附图说明
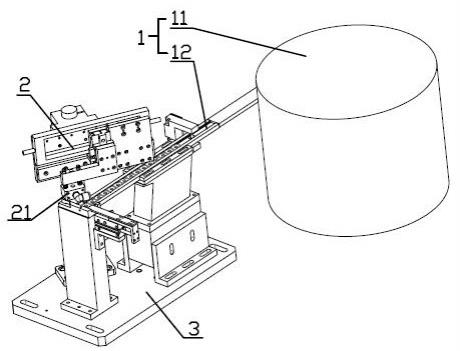
18.图1为本实施例自动进料机构的结构示意图;
19.图2为本实施例自动进料机构另一状态的结构示意图;
20.图3为本实施例自动进料机构中转运组件从分拣输料组件取料状态的结构示意图;
21.图4为本实施例自动进料机构中转运组件在目的位置放料状态的结构示意图;
22.图5为本实施例自动进料机构包括翻转机构形式的结构示意图;
23.图6为本实施例自动进料机构中翻转机构与输料通道配合的示意图;
24.图7为本实施例自动进料机构中翻转轴的结构示意图。
具体实施方式
25.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
实施例
26.如图1和图2所示,一种自动进料机构,包括机架3,所述的机架3上设有分拣输料组件1和转运组件2。所述的分拣输料组件1包括分拣装置11和输料通道12,所述的分拣装置11为振动盘。所述输料通道12的入口端与振动盘对应,出口端与转运组件2对应。振动盘用于零部件的分拣操作,输料通道12用于零部件的引导输送。
27.如图1、图3和图4所示,所述的转运组件2包括吸附单元21、驱动吸附单元21水平运动的水平转运单元,及驱动吸附单元21竖直运动的竖直转运单元。其中所述的吸附单元21包括采用负压吸附模式工作的吸附头,负压吸附模式可以在保证夹持可靠性的基础上,减小对零部件磁场的影响。
28.如图3和图4所示,所述的水平转运单元包括与机架3沿水平方向滑动连接的转运基座22,所述的机架3上还设有驱动转运基座22相对于机架3滑动的第一驱动装置24。所述的吸附单元21与转运基座22沿竖直方向滑动连接;所述的竖直转运单元包括驱动吸附单元21相对于转运基座22滑动的第二驱动装置23。水平转运单元和竖直转运单元共同完成吸附单元21的转运,同时实现零部件的进料操作。
29.如图5
‑
图7所示,还包括翻转机构5,所述的翻转机构5包括翻转轴52及驱动翻转轴52转动的第三驱动装置51,所述翻转轴52的旋转中心平行于水平方向;所述的翻转轴52上设有两个并行设置的夹持臂521,两个夹持臂521之间形成翻转空间522。
30.需要翻转的零部件放入翻转空间522内,并伴随翻转轴52转动,实现翻转操作。在电声器件的组装过程中,至少有一个零部件需要涂胶后翻转。通常为外壳在涂胶后翻转,最后与磁石粘接。
31.如图和图6所示,还包括至少两个与翻转空间522对应的水平推送单元4。所述的水平推送单元4包括与机架3沿水平方向滑动的推送臂42,及驱动推送臂42相对于机架3滑动的第四驱动装置41。其中一个水平推送单元4用于将零部件推送入翻转空间522,另一个水平推送单元4用于在翻转完成后将零部件从推送空间内推出。
32.总之,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种自动进料机构,其特征在于:包括机架,所述的机架上设有分拣输料组件和转运组件,所述的分拣输料组件包括分拣装置;所述的转运组件包括吸附单元、驱动吸附单元水平运动的水平转运单元,及驱动吸附单元竖直运动的竖直转运单元;还包括翻转机构,所述的翻转机构包括翻转轴及驱动翻转轴转动的第三驱动装置,所述翻转轴的旋转中心平行于水平方向;所述的翻转轴上设有两个并行设置的夹持臂,两个夹持臂之间形成翻转空间。2.根据权利要求1所述的自动进料机构,其特征在于:所述的吸附单元包括采用负压吸附模式工作的吸附头。3.根据权利要求1所述的自动进料机构,其特征在于:所述的分拣装置为振动盘;所述的分拣输料组件还包括输料通道,所述输料通道的入口端与振动盘对应,出口端与转运组件对应。4.根据权利要求1所述的自动进料机构,其特征在于:所述的水平转运单元包括与机架沿水平方向滑动连接的转运基座,所述的机架上还设有驱动转运基座相对于机架滑动的第一驱动装置;所述的吸附单元设置在转运基座上。5.根据权利要求4所述的自动进料机构,其特征在于:所述的吸附单元与转运基座沿竖直方向滑动连接;所述的竖直转运单元包括驱动吸附单元相对于转运基座滑动的第二驱动装置。6.根据权利要求1所述的自动进料机构,其特征在于:还包括至少两个与翻转空间对应的水平推送单元。7.根据权利要求6所述的自动进料机构,其特征在于:所述的水平推送单元包括与机架沿水平方向滑动的推送臂,及驱动推送臂相对于机架滑动的第四驱动装置。
技术总结
本实用新型涉及一种自动化设备,具体公开了一种自动进料机构。该自动进料机构包括机架,所述的机架上设有分拣输料组件和转运组件,所述的分拣输料组件包括分拣装置;所述的转运组件包括吸附单元、驱动吸附单元水平运动的水平转运单元,及驱动吸附单元竖直运动的竖直转运单元。以上所述的自动进料机构对零部件进行自动分拣,并通过转运组件进料,提高生产效率,降低生产成本。降低生产成本。降低生产成本。
技术研发人员:吕文武 童排贵
受保护的技术使用者:海宁鐵三角科技有限公司
技术研发日:2020.12.22
技术公布日:2021/9/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1