快速智能码垛机械桶抓手用卡爪结构的制作方法
1.本实用新型涉及一种快速智能码垛机械桶抓手用卡爪结构。
背景技术:
2.码垛机械手能将不同外形尺寸的包装货物,整齐、自动地码(或拆)在托盘上(或生产线上等)。为充分利用托盘的面积和码堆物料的稳定性,机器人具有物料码垛顺序、排列设定器,可满足从低速到高速,从包装袋到纸箱,从码垛一种产品到码垛多种不同产品。目前码垛机械手广泛应用于汽车、物流、家电、医药、食品饮料等不同领域。
3.现有的码垛机械桶抓手中夹爪夹取不同大桶体时,需要调整两个夹爪之间的距离,但是调整范围有限,因此利用率低,再更换其他桶抓手,浪费了工作时间。因此,目前亟需一种利用率高,适用范围广,提高工作效率的快速智能码垛机械桶抓手用夹取机构。
技术实现要素:
4.本实用新型的目的在于克服上述不足,提供一种利用率高,适用范围广,提高工作效率的快速智能码垛机械桶抓手用夹取机构。
5.本实用新型的目的是这样实现的:
6.快速智能码垛机械桶抓手用卡爪结构,包含有设置于曲臂上的气缸和齿板结构,所述曲臂有两组且对称设置;曲臂的上端设置有联动块,气缸的缸座顶部通过转动杆与联动块铰接;所述齿板结构包含有固定板和设置于固定板上的一排齿叉;所述固定板的一侧设置有联动臂,气缸的活塞杆端部设置有关节轴承,联动臂与上述关节轴承之间通过转轴铰接,所述固定板的另一侧设置有转轴架,曲臂的下端设置有轴承座,轴承座内部设有轴承,固定板的转轴架与轴承座内的轴承通过转轴铰接;所述固定板在靠近转轴架的一侧开设有一排固定孔,齿叉固定通过固定柱插置于安装条上,固定柱穿过安装条插置于固定板上的固定孔中。
7.本实用新型快速智能码垛机械桶抓手用卡爪结构,所述固定板上开设有两个定位孔,所述安装条在靠近固定柱的一侧设置有两个与定位孔相配合的定位柱,所述定位柱插入定位孔中。
8.与现有技术相比,本实用新型的有益效果是:
9.本实用新型快速智能码垛机械桶抓手用卡爪结构包含有设置于曲臂上气缸和齿板结构,气缸的缸座铰接于曲臂的上端,齿板结构包含有固定板以及设置于固定板上的齿叉,气缸的活塞杆端部与固定板的一侧铰接,曲臂的下端与固定板的另一侧铰接,气缸的活塞杆伸缩控制固定板的一侧转动,同时固定板的另一侧在曲臂的下端转动,固定板带动齿叉转动,调节两个齿叉之间的距离,以适应不同尺寸的待夹物,利用率高,适用范围广,提高了工作效率。
附图说明
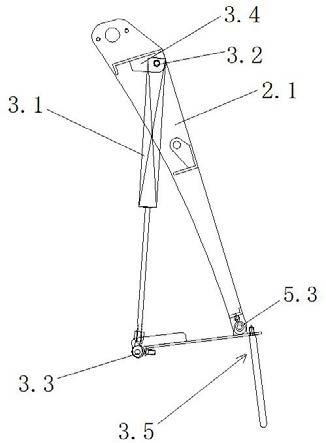
10.图1为本实用新型快速智能码垛机械桶抓手用卡爪结构的结构示意图。
11.图2为图1中曲臂、气缸和齿板的连接示意图。
12.图3为图2中齿板结构的结构示意图。
13.图4为图3中固定板的示意图。
14.图5为图3中齿叉的示意图。
15.其中:曲臂2.1、气缸3.1、转动杆3.2、关节轴承3.3、联动块3.4、齿板结构3.5、联动臂5.1、固定板5.2、轴承座5.3、齿叉5.4、定位柱5.5、定位孔5.6、固定孔5.7、固定柱5.8、安装条5.9、转轴架5.10。
具体实施方式
16.参见图1至图5,本实用新型涉及的一种快速智能码垛机械桶抓手用卡爪结构,包含有设置于曲臂2.1上的气缸3.1和齿板结构3.5,所述曲臂2.1有两组且对称设置;曲臂2.1的上端设置有联动块3.4,气缸3.1的缸座顶部通过转动杆3.2与联动块3.4铰接;所述齿板结构3.5包含有固定板5.2和设置于固定板5.2上的一排齿叉5.4;所述固定板5.2的一侧设置有联动臂5.1,气缸3.1的活塞杆端部设置有关节轴承3.3,联动臂5.1与上述关节轴承3.3之间通过转轴铰接,所述固定板5.2的另一侧设置有转轴架5.10,曲臂2.1的下端设置有轴承座5.3,轴承座5.3内部设有轴承,固定板5.2的转轴架5.10与轴承座5.3内的轴承通过转轴铰接;所述固定板5.2在靠近转轴架5.10的一侧开设有一排固定孔5.7,齿叉5.4固定通过固定柱5.8插置于安装条5.9上,固定柱5.8穿过安装条5.9再插置于固定板5.2上的固定孔5.7中;
17.进一步的,所述固定板5.2上开设有两个定位孔5.6,所述安装条5.9在靠近固定柱5.8的一侧设置有两个与定位孔5.6相配合的定位柱5.5,所述定位柱5.5插入定位孔5.6中进行定位。
18.本实用新型快速智能码垛机械桶抓手用卡爪结构的工作原理是:气缸3.1的活塞杆伸缩控制固定板5.2的一侧转动,同时固定板5.2的另一侧在曲臂2.1的下端转动,固定板5.2带动齿叉5.4转动,调节两个齿叉5.4之间的距离,以适应不同尺寸的待夹物。
19.另外:需要注意的是,上述具体实施方式仅为本专利的一个优化方案,本领域的技术人员根据上述构思所做的任何改动或改进,均在本专利的保护范围之内。
技术特征:
1.快速智能码垛机械桶抓手用卡爪结构,其特征在于:包含有设置于曲臂(2.1)上的气缸(3.1)和齿板结构(3.5),所述曲臂(2.1)有两组且对称设置;曲臂(2.1)的上端设置有联动块(3.4),气缸(3.1)的缸座顶部通过转动杆(3.2)与联动块(3.4)铰接;所述齿板结构(3.5)包含有固定板(5.2)和设置于固定板(5.2)上的一排齿叉(5.4);所述固定板(5.2)的一侧设置有联动臂(5.1),气缸(3.1)的活塞杆端部设置有关节轴承(3.3),联动臂(5.1)与上述关节轴承(3.3)之间通过转轴铰接,所述固定板(5.2)的另一侧设置有转轴架(5.10),曲臂(2.1)的下端设置有轴承座(5.3),轴承座(5.3)内部设有轴承,固定板(5.2)的转轴架(5.10)与轴承座(5.3)内的轴承通过转轴铰接;所述固定板(5.2)在靠近转轴架(5.10)的一侧开设有一排固定孔(5.7),齿叉(5.4)固定通过固定柱(5.8)插置于安装条(5.9)上,固定柱(5.8)穿过安装条(5.9)插置于固定板(5.2)上的固定孔(5.7)中。2.根据权利要求1所述的快速智能码垛机械桶抓手用卡爪结构,其特征在于:所述固定板(5.2)上开设有两个定位孔(5.6),所述安装条(5.9)在靠近固定柱(5.8)的一侧设置有两个与定位孔(5.6)相配合的定位柱(5.5),所述定位柱(5.5)插入定位孔(5.6)中。
技术总结
本实用新型涉及一种快速智能码垛机械桶抓手用卡爪结构,包含有设置于曲臂上的气缸和齿板结构,所述曲臂有两组且对称设置;曲臂的上端设置有联动块,气缸的缸座顶部通过转动杆与联动块铰接;所述齿板结构包含有固定板和设置于固定板上的一排齿叉;所述固定板的一侧设置有联动臂,气缸的活塞杆端部设置有关节轴承,联动臂与上述关节轴承之间通过转轴铰接,所述固定板的另一侧设置有转轴架,曲臂的下端设置有轴承座,轴承座内部设有轴承,固定板的转轴架与轴承座内的轴承通过转轴铰接。本实用新型涉及一种快速智能码垛机械桶抓手用卡爪结构,使用率高,适用范围广,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:胡玉峰
受保护的技术使用者:江阴博灵智能科技有限公司
技术研发日:2020.12.30
技术公布日:2021/10/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1