一种设有折叠式双托盘的物流运输机器人的制作方法
1.本发明涉及机器人的技术领域,更具体地说涉及一种设有折叠式双托盘的物流运输机器人。
背景技术:
2.近些年来,随着自动控制领域科技的不断发展进步,越来越多的行业已经开始了无人化进程,无人驾驶汽车、无人超市、快递自动分拣系统等都已经出现在人们的视野中,甚至已经开始了商业化运行。在物流行业,由于人力成本占据了物流成本的很大一部分,为了实现低成本运营,无人化是物流行业发展的必经之路,这样还可以节约大量的人力资源,促进社会的发展。如快递物流行业,货物的分拣和搬运可以分拣机器人和物流机器人代替人工完成;
3.现有的物流机器一般为下侧的底座和设于底座上侧的托盘,托盘上往往只能排放一个货件,为了摆放更多的货件,有提出在底座设置一个承载座,承载座上可以设置多个托盘,就可以摆放多个货件,而且还可以分类安放;而现有承载座的托盘一般是固定的,托盘之间存在一定的间距,导致托盘上无法安放超过一定高度的货件,至少物流机器就无法运载较高高度的货件。
技术实现要素:
4.本发明的目的就是针对现有技术之不足,而提供了一种设有折叠式双托盘的物流运输机器人,其机器人承载座上的下托盘能进行翻转,实现承载座上可以安置高度较高的货件。
5.一种设有折叠式双托盘的物流运输机器人,包括机器人上的承载座,承载座的前端面上成型有贯穿承载座后端面的矩形腔槽,承载座的顶部固定有上托盘,承载座的矩形腔槽内插设有水平的下托盘,下托盘两侧壁的前、后端成型有横向的支柱,所述承载座内矩形腔槽内侧壁的前端成型有前卡槽、后端成型有与前卡槽相对的后卡槽,后卡槽包括圆形的后支撑孔,后支撑孔前侧的内壁上成型有向上倾斜的后导向槽,后导向槽的前端成型有圆形的后定位孔;所述的前卡槽包括圆形的前支撑孔,前支撑孔后支撑孔前侧的内壁上成型有向上倾斜的前导向槽,前导向槽的前端成型有圆弧形的翻转槽,翻转槽的下端位于后定位孔的正下方;所述下托盘前、后端的支柱分别插接在前支撑孔和后支撑孔内并抵靠在前支撑孔和后支撑孔下端的内壁上。
6.优选的,所述下托盘前端面与下托盘后端面的距离小于下托盘下端面至承载座矩形腔槽下底面之间的间距,下托盘位于矩形腔槽的中部。
7.优选的,所述下托盘的前端面上成型有横向的进料槽口。
8.优选的,所述承载座上前支撑孔的孔径等于后支撑孔的孔径,后定位孔的孔径等于翻转槽的槽宽。
9.优选的,所述后支撑孔的孔径大于后定位孔的孔径,后导向槽前端的槽宽小于后
定位孔的孔径。
10.优选的,所述翻转槽的圆弧圆心位于后定位孔的中心轴线上,翻转槽至后定位孔的中心距等于后支撑孔与前支撑孔之间的中心距。
11.优选的,所述下托盘上支柱的直径等于后定位孔的孔径。
12.优选的,所述翻转槽的圆弧弧度等于1/2π。
13.本发明的有益效果在于:其采用的机器人承载座上的下托盘能进行翻转,实现承载座上可以安置高度较高的货件,机器人就可以运载高度较高的货件。
附图说明
14.图1为本发明的立体结构示意图;
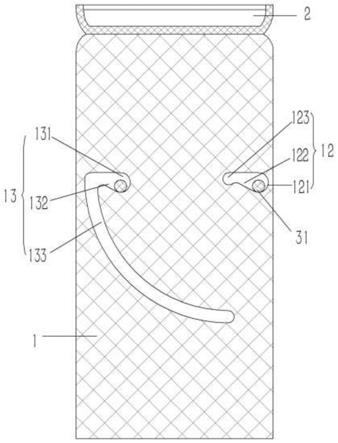
15.图2为本发明正视的结构示意图;
16.图3为图2中a
‑
a处的剖视示意图。
17.图中:1、承载座;11、矩形腔槽;12、后卡槽;121、后支撑孔;122、后导向槽;123、后定位孔;13、前卡槽;131、前支撑孔;132、前导向槽;133、翻转槽;2、上托盘;3、下托盘;31、支柱;32、进料槽口。
具体实施方式
18.实施例:见图1至3所示,一种设有折叠式双托盘的物流运输机器人,包括机器人上的承载座1,承载座1的前端面上成型有贯穿承载座1后端面的矩形腔槽11,承载座1的顶部固定有上托盘2,承载座1的矩形腔槽11内插设有水平的下托盘3,下托盘3两侧壁的前、后端成型有横向的支柱31,所述承载座1内矩形腔槽11内侧壁的前端成型有前卡槽13、后端成型有与前卡槽13相对的后卡槽12,后卡槽12包括圆形的后支撑孔121,后支撑孔121前侧的内壁上成型有向上倾斜的后导向槽122,后导向槽122的前端成型有圆形的后定位孔123;所述的前卡槽13包括圆形的前支撑孔131,前支撑孔131后支撑孔121前侧的内壁上成型有向上倾斜的前导向槽132,前导向槽132的前端成型有圆弧形的翻转槽133,翻转槽133的下端位于后定位孔123的正下方;所述下托盘3前、后端的支柱31分别插接在前支撑孔131和后支撑孔121内并抵靠在前支撑孔131和后支撑孔121下端的内壁上。
19.所述下托盘3前端面与下托盘3后端面的距离小于下托盘3下端面至承载座1矩形腔槽11下底面之间的间距,下托盘3位于矩形腔槽11的中部。
20.所述下托盘3的前端面上成型有横向的进料槽口32。
21.所述承载座1上前支撑孔131的孔径等于后支撑孔121的孔径,后定位孔123的孔径等于翻转槽133的槽宽。
22.所述后支撑孔121的孔径大于后定位孔123的孔径,后导向槽122前端的槽宽小于后定位孔123的孔径。
23.所述翻转槽133的圆弧圆心位于后定位孔123的中心轴线上,翻转槽133至后定位孔123的中心距等于后支撑孔121与前支撑孔131之间的中心距。
24.所述下托盘3上支柱31的直径等于后定位孔123的孔径。
25.所述翻转槽133的圆弧弧度等于1/2π。
26.工作原理:本发明为一种设有折叠式双托盘的物流运输机器人,其机器人上设有
承载座1,承载座1内安置有下托盘3,承载座1的顶部设有上托盘2,两个托盘内可以分类安放不同的货件,而且矩形腔槽11的下端面上还可以安放另外的货件;
27.而需要安放高度较高的货件时,可以利用分拣机器人推动下托盘3向前移动,下托盘3后侧的支柱31插接到后定位孔123内,而下托盘3前侧的支柱31落入翻转槽133,进而下托盘3可以进行翻转成竖直,承载座1的矩形腔槽11内就可以安放高度较高的货件。
28.所述实施例用以例示性说明本发明,而非用于限制本发明。任何本领域技术人员均可在不违背本发明的精神及范畴下,对所述实施例进行修改,因此本发明的权利保护范围,应如本发明的权利要求所列。
技术特征:
1.一种设有折叠式双托盘的物流运输机器人,包括机器人上的承载座(1),承载座(1)的前端面上成型有贯穿承载座(1)后端面的矩形腔槽(11),其特征在于:承载座(1)的顶部固定有上托盘(2),承载座(1)的矩形腔槽(11)内插设有水平的下托盘(3),下托盘(3)两侧壁的前、后端成型有横向的支柱(31),所述承载座(1)内矩形腔槽(11)内侧壁的前端成型有前卡槽(13)、后端成型有与前卡槽(13)相对的后卡槽(12),后卡槽(12)包括圆形的后支撑孔(121),后支撑孔(121)前侧的内壁上成型有向上倾斜的后导向槽(122),后导向槽(122)的前端成型有圆形的后定位孔(123);所述的前卡槽(13)包括圆形的前支撑孔(131),前支撑孔(131)后支撑孔(121)前侧的内壁上成型有向上倾斜的前导向槽(132),前导向槽(132)的前端成型有圆弧形的翻转槽(133),翻转槽(133)的下端位于后定位孔(123)的正下方;所述下托盘(3)前、后端的支柱(31)分别插接在前支撑孔(131)和后支撑孔(121)内并抵靠在前支撑孔(131)和后支撑孔(121)下端的内壁上。2.根据权利要求1所述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述下托盘(3)前端面与下托盘(3)后端面的距离小于下托盘(3)下端面至承载座(1)矩形腔槽(11)下底面之间的间距,下托盘(3)位于矩形腔槽(11)的中部。3.根据权利要求2所述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述下托盘(3)的前端面上成型有横向的进料槽口(32)。4.根据权利要求1所述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述承载座(1)上前支撑孔(131)的孔径等于后支撑孔(121)的孔径,后定位孔(123)的孔径等于翻转槽(133)的槽宽。5.根据权利要求4述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述后支撑孔(121)的孔径大于后定位孔(123)的孔径,后导向槽(122)前端的槽宽小于后定位孔(123)的孔径。6.根据权利要求5所述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述翻转槽(133)的圆弧圆心位于后定位孔(123)的中心轴线上,翻转槽(133)至后定位孔(123)的中心距等于后支撑孔(121)与前支撑孔(131)之间的中心距。7.根据权利要求6所述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述下托盘(3)上支柱(31)的直径等于后定位孔(123)的孔径。8.根据权利要求6所述的一种设有折叠式双托盘的物流运输机器人,其特征在于:所述翻转槽(133)的圆弧弧度等于1/2π。
技术总结
本发明公开了一种设有折叠式双托盘的物流运输机器人,包括机器人上的承载座,承载座的前端面上成型有贯穿承载座后端面的矩形腔槽,承载座的顶部固定有上托盘,承载座的矩形腔槽内插设有水平的下托盘,下托盘两侧壁的前、后端成型有横向的支柱,所述承载座内矩形腔槽内侧壁的前端成型有前卡槽、后端成型有与前卡槽相对的后卡槽,后卡槽包括圆形的后支撑孔,后支撑孔前侧的内壁上成型有向上倾斜的后导向槽,后导向槽的前端成型有圆形的后定位孔;所述的前卡槽包括圆形的前支撑孔,前支撑孔后支撑孔前侧的内壁上成型有向上倾斜的前导向槽。导向槽。导向槽。
技术研发人员:林国正
受保护的技术使用者:林国正
技术研发日:2021.09.17
技术公布日:2021/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1