一种单元式可拼接传输带机构
1.本发明新型涉及一种传输带机构,主要用于加工过程中各工序间齿轮的运输,属于智能传输带领域。
背景技术:
2.齿轮是机械工业中应用范围最广泛的产品,需求量极大,然而我国齿轮生产却仍以劳动密集型人工生产为主,工序间零件转移及生产节拍控制主要通过人工实现,关键装备及生产线与国际先进水平差距较大;齿轮加工自动生产线具有自动化程度高,人工干预少,安全环保等优点,是齿轮加工技术未来主要发展方向;因此,在进行齿轮加工的过程中,各工序间的零件转移的智能化有较大的意义。
技术实现要素:
3.本发明的目的是设计一种具有较高精度,可调节拼接角度以减少对于生产场地浪费的用于传递齿轮的单元式可拼接的传输带机构。
4.基本技术方案是:一种单元式可拼接传输带机构,其特征在于,包括:底座,桁架,夹紧机构,机械手机构和滚轮传动机构;其中,所述的桁架用于固定滚轮传动机构,并在其上开有用于机械手机构滑动的滑轨,所述的基座用于支撑和固定桁架以及将滚轮传动机构的伺服电机固定于其上;伺服电机启动后,由伺服电机带动电机轮转动,电机轮通过电机带与滚轮传动机构的滚轮一形成带传动使得滚轮传动机构转动,之后十五个滚轮传动机构分别通过滚轮带连接形成带传动,形成一个传输带单元以实现齿轮在传输带上的直线运动。
5.所述滚轮传动机构包括伺服电机和滚轮单元,所述的滚轮单元由滚轮一, 传动轴杆一,轴杆套杆,传动轴螺母一,传动轴垫片一和传动轴垫片二和轴承一,轴承二以及轴承盖一和轴承盖二组成;轴承一以传动轴杆一进行定位并固定,轴承二以传动轴螺母一进行定位并固定,之后传动轴杆一,传动轴螺母一,传动轴垫片一和传动轴垫片二和轴承一,轴承二组成传动轴整体与轴杆套杆一形成过盈配合;所述夹紧机构由夹头一,连杆一,连接件一,轴套,螺杆以及内螺纹件组成。夹头一与连杆一连接,连杆一与连接件一和内螺纹件连接,连接件一再与轴套进行连接后轴杆再与轴套和内螺纹件连接, 其中夹紧机构的连接均为间隙配合连接;所述机械手机构包括基座,腰部回转座,大臂,小臂,肘部,腕部,腰部电机,肘部电机和机械爪整体组成;所述的机械爪整体由电机外筒一,丝杠螺母,机械爪组成。机械爪与电机外筒一,丝杠螺母间隙配合连接;机械爪整体通过腕部与小臂进行连接,小臂则通过肘部以及肘部电机与大臂连接,大臂则通过腰部电机和腰部回转座与基座连接;本发明的有益效果是:1. 一种单元式可拼接传输带机构,因其以单元进行拼接可以单个使用或多个拼
接使用,可以增加灵活性适用于更多场景;2. 多个单元进行拼接时,可以通过调节夹紧机构调节拼接角度,可调节角度范围为0~30
°
,可以最大程度利用生产场地;3.使用带传动驱动滚轮,可以有较高的精度以及传动效率,并使得齿轮传动时较为平稳。
6.附图说明:下面结合附图和实施方式对本机构进一步说明。
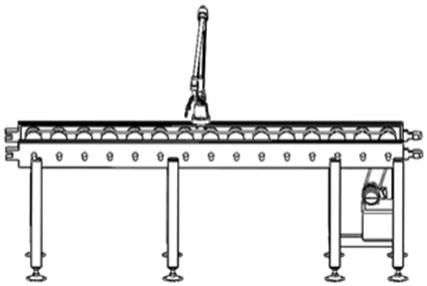
7.附图1:本发明的单个传输带单元示意图;附图2:本发明的拼接后整体示意图;附图3:本发明的滚轮传动机构结构示意图;附图4:本发明的滚轮传动机构滚轮单元剖面图;附图5:本发明的夹紧机构结构示意图;附图6:本发明的各单元连接部分结构示意图;附图7:本发明的机械手机构结构示意图;图中:1底座,2桁架,3夹紧机构,4机械手机构,5滚轮传动机构,6伺服电机,7电机带,8滚轮带,9 滚轮单元,10轴承一,11轴承盖一,12 传动轴杆一,13传动轴螺母一,14轴杆套杆,15滚轮,16轴承盖二,17轴承二,18夹头,19连杆一,20连接件一,21螺杆,22轴套,23内螺纹件连接,24机械爪,25电机外筒一,26丝杠螺母,27机械手腕部,28机械手小臂,29机械手肘部,30肘部电机,31机械手大臂,32腰部电机,33腰部回转座,34机械手基座。
具体实施方式
8.本发明整体结构如附图1、2所示,一种单元式可拼接传输带机构,其组成包括底座(1),桁架(2),夹紧机构(3),机械手机构(4)和滚轮传动机构(5),桁架(2)用于固定滚轮传动机构(5),并在其上开有用于机械手机构(4)滑动的滑轨,底座(1)用于支撑和固定桁架(2)以及将伺服电机(6)固定于其上;伺服电机(6)启动后,带动电机轮转动,电机轮通过电机带(7)与滚轮传动机构的滚轮(15)形成带传动使得滚轮传动机构转动,之后十五个滚轮传动机构分别通过滚轮带(8)连接形成带传动,形成一个传输带单元以实现齿轮在传输带上的直线运动。
9.其中,由附图3、4所示滚轮传动机构(5)包括伺服电机(6)和滚轮单元(9),滚轮单元(9)由滚轮(15), 传动轴杆一(12),轴杆套杆(14),传动轴螺母一(13),轴承一(10),轴承二(17)以及轴承盖一(11)和轴承盖二(16)组成;轴承一(10)以传动轴杆一(12)进行定位并固定,轴承二(17)以传动轴螺母一(13)进行定位并固定,之后传动轴杆一(12),传动轴螺母一(13),轴承一(10),轴承二(17)组成传动轴整体再与轴杆套杆(14)形成过盈配合。
10.夹紧机构(3)由附图5所示,包括夹头一(18),连杆一(19),连接件一(20),轴套(22),螺杆(21)以及内螺纹件(23)组成。夹头一(18)与连杆一(19)连接,连杆一(19)与连接件一(20)和内螺纹件(23)连接,连接件一(20)与轴套(22)进行连接后螺杆(21)再与轴套(22)和内螺纹件(23)连接,其中夹紧机构的连接均为间隙配合连接。
11.机械手机构由附图7所示包括机械手基座(34),腰部回转座(33),机械手大臂(31),机械手小臂(28),机械手肘部(29),机械手腕部(27),腰部电机(32),肘部电机(30)和
机械爪整体组成。所述的机械爪整体由电机外筒一(25),丝杠螺母(26),机械爪(24)组成。机械爪(24)与电机外筒一(25),丝杠螺母(26)间隙配合连接。机械爪整体通过腕部(27)与小臂(28)进行连接,小臂(28)则通过肘部(29)以及肘部电机(30)与大臂(31)连接,大臂(31)最后通过腰部电机(32)和腰部回转座(33)与机械手基座(34)连接。
技术特征:
1.一种单元式可拼接传输带机构,其特征在于,包括底座(1),桁架(2),夹紧机构(3),机械手机构(4)和滚轮传动机构(5),桁架(2)用于固定滚轮传动机构(5),并在其上开有用于机械手机构(4)滑动的滑轨,底座(1)用于支撑和固定桁架(2)以及将伺服电机(6)固定于其上;伺服电机(6)启动后,带动电机轮转动,电机轮通过电机带(7)与滚轮传动机构的滚轮(15)形成带传动使得滚轮传动机构转动,然后十五个滚轮传动机构分别通过滚轮带(8)连接形成带传动组成一个传输带单元,实现齿轮在传输带上的直线运动。2.根据权利要求1所述的一种单元式可拼接传输带机构,其特征在于,所述滚轮传动机构(5)包括伺服电机(6)和滚轮单元(9),滚轮单元(9)由滚轮(15), 传动轴杆一(12),轴杆套杆(14),传动轴螺母一(13),轴承一(10),轴承二(17)以及轴承盖一(11)和轴承盖二(16)组成;轴承一(10)以传动轴杆一(12)进行定位并固定,轴承二(17)以传动轴螺母一(13)进行定位并固定,之后传动轴杆一(12),传动轴螺母一(13),轴承一(10),轴承二(17)组成传动轴整体再与轴杆套杆(14)形成过盈配合。3.根据权利要求1所述的一种单元式可拼接传输带机构,所述夹紧机构(3),包括夹头一(18),连杆一(19),连接件一(20),轴套(22),螺杆(21)以及内螺纹件(23)组成;夹头一(18)与连杆一(19)连接,连杆一(19)与连接件一(20)和内螺纹件(23)连接,连接件一(20)与轴套(22)进行连接后螺杆(21)再与轴套(22)和内螺纹件(23)连接,其中夹紧机构的连接均为间隙配合连接。4.根据权利要求1所述的一种单元式可拼接传输带机构,所述机械手机构包括机械手基座(34),腰部回转座(33),机械手大臂(31),机械手小臂(28),机械手肘部(29),机械手腕部(27),腰部电机(32),肘部电机(30)和机械爪整体组成;所述的机械爪整体由电机外筒一(25),丝杠螺母(26),机械爪(24)组成;机械爪(24)与电机外筒一(25),丝杠螺母(26)间隙配合连接机械爪整体通过腕部(27)与小臂(28)进行连接,小臂(28)则通过肘部(29)以及肘部电机(30)与大臂(31)连接,大臂(31)最后通过腰部电机(32)和腰部回转座(33)与机械手基座(34)连接。
技术总结
本发明涉及一种传输带机构,尤其涉及一种单元式可拼接传输带机构,包括:底座,桁架,夹紧机构,机械手机构和滚轮传动机构。滚轮传动机构包括伺服电机和滚轮单元,机械手机构由基座,腰部回转座,大臂,小臂,肘部,腕部,腰部电机,肘部电机和机械爪整体组成;所述的机械爪整体由电机外筒一,丝杠螺母,机械爪组成;夹紧机构包括夹头一,连杆一,连接件一,轴套,螺杆以及内螺纹件;本发明优点在于1.单元式可拼接传输带机构,因其以单元进行拼接可以单个使用或多个拼接使用,可以增加灵活性适用于更多场景,2.多个单元进行拼接时,可以通过调节夹紧机构调节拼接角度,可调节角度范围为0~30
技术研发人员:张元 张玉涛
受保护的技术使用者:哈尔滨理工大学
技术研发日:2021.10.05
技术公布日:2021/11/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1