基于力矩限制器的标定方法、控制器及标定装置与流程
本申请涉及工程机械领域,具体地,涉及一种基于力矩限制器的标定方法、控制器及标定装置。
背景技术:
1、起重机力矩限制器是一种实时的起重力矩安全检测装置,通过力矩限制起可以查看起重机的臂长、角度、幅度、吊重、力矩百分比等参数,同时也可以查询力矩限制器的工作记录及超载记录。
2、在力矩限制器安装完成后,由于传感器的安装误差、个体差异以及采集链路的差异,如果采用理论的函数关系进行换算,则实际传感器的物理信号与力矩限制器采集得到的采集值所代表的物理关系之间必定存在差异,因此,在力矩限制器调试时,一般通过两点标定或者多点标定去计算物理量与采集值的信号关系。现有的力矩限制器的采集通道标定,一般都是采用两点或者多点的方式,即采集两个或者多个采集通道信号在不同状态下的物理值和信号值,通过计算物理值和信号值的换算关系,获得该改通道的标定参数
技术实现思路
1、本申请的目的是提供一种可以不局限于采用两点或多点的标定基于力矩限制器的标定方法、控制器及标定装置。
2、为了实现上述目的,本申请提供一种基于力矩限制器的标定方法,应用于起重机,方法包括:
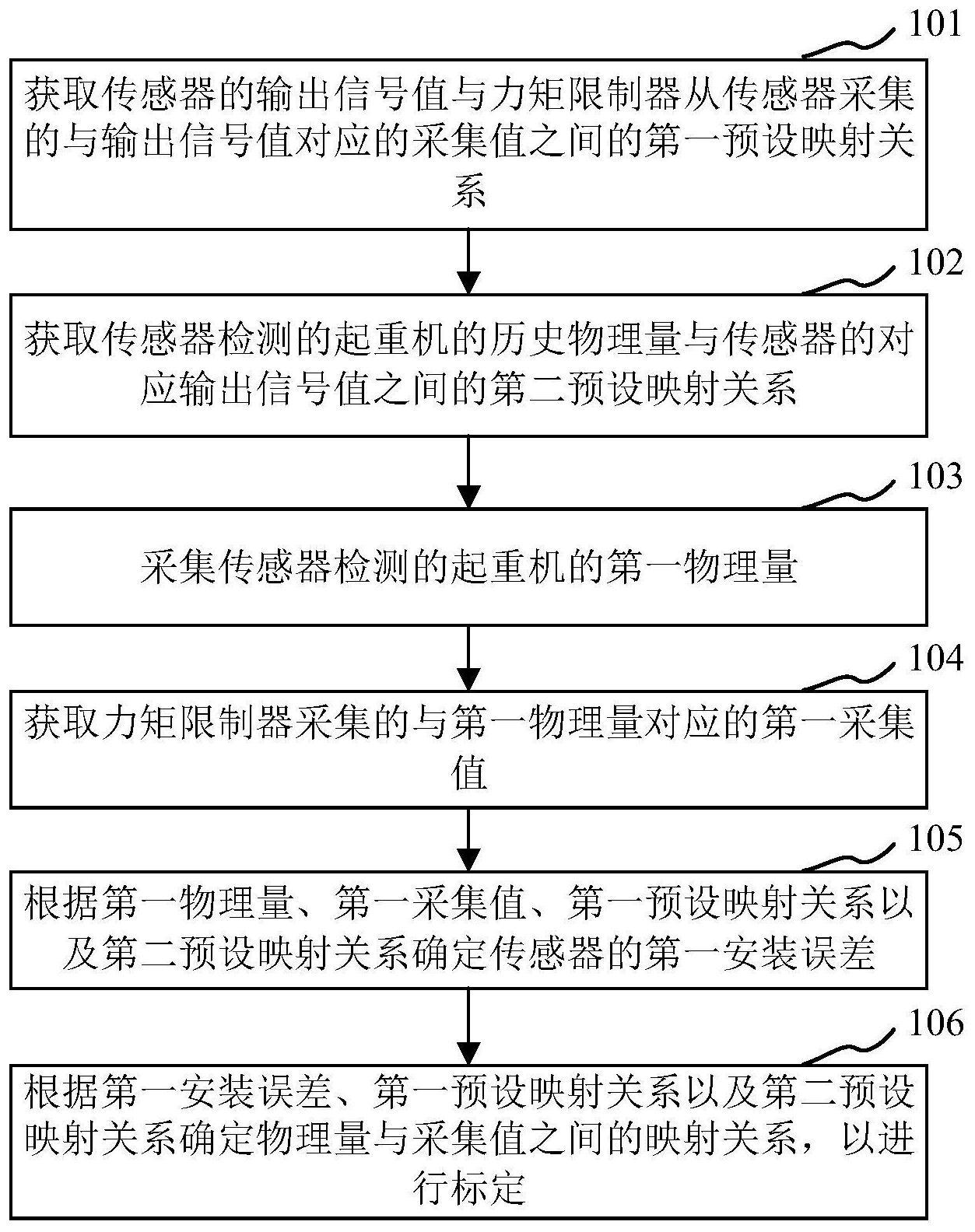
3、获取传感器的输出信号值与力矩限制器从传感器采集的与输出信号值对应的采集值之间的第一预设映射关系;
4、获取传感器检测的起重机的历史物理量与传感器的对应输出信号值之间的第二预设映射关系;
5、采集传感器检测的起重机的第一物理量;
6、获取力矩限制器采集的与第一物理量对应的第一采集值;
7、根据第一物理量、第一采集值、第一预设映射关系以及第二预设映射关系确定传感器的第一安装误差;
8、根据第一安装误差、第一预设映射关系以及第二预设映射关系确定物理量与采集值之间的映射关系,以进行标定。
9、在本申请实施例中,获取传感器的输出信号值与力矩限制器从传感器采集的与输出信号值对应的采集值之间的第一预设映射关系包括:通过预设精度的信号发送器输出传感器的多组预设信号值;通过采集通道将多组预设信号值传输至力矩限制器,以通过力矩限制器确定与每组预设信号值对应的采集值;统计并分析每组预设信号值与对应的采集值之间的映射关系,以确定第一预设映射关系。
10、在本申请实施例中,获取传感器检测的起重机的历史物理量与传感器的对应输出信号值之间的第二预设映射关系包括:获取传感器检测的多组历史物理量;获取传感器输出的与每组历史物理量对应的输出信号值;统计并分析与每组历史物理量对应的输出信号值之间的映射关系,以确定第二预设映射关系。
11、在本申请实施例中,传感器包括液压压力传感器、长度传感器、角度传感器、拉力传感器以及压力传感器中的至少一者。
12、在本申请实施例中,获取力矩限制器采集的与第一物理量对应的第一采集值包括:通过传感器采集起重机的第一物理量,以输出与第一物理量对应的第一传感器信号值;通过采集通道将第一传感器信号值传输至力矩限制器,以通过力矩限制器确定与第一物理量对应的第一采集值。
13、在本申请实施例中,根据第一安装误差、第一预设映射关系以及第二预设映射关系确定物理量与采集值之间的映射关系,以进行标定包括:通过传感器采集起重机的第二物理量,以输出与第二物理量对应的第二传感器信号值;力矩限制器通过采集通道获取传感器输出的第二传感器信号值,以确定与第二物理量对应的第二采集值;根据第二物理量、与第二物理量对应的第二采集值以及映射关系确定传感器的第二安装误差;根据第二安装误差以进行标定。
14、在本申请实施例中,根据第二安装误差以进行标定包括:根据第二安装误差对力矩限制器接收的传感器的输出信号进行调整。
15、本申请第二方面提供一种控制器,被配置成执行上述中任意一项的基于力矩限制器的单点标定方法。
16、本申请第三方面提供了一种基于力矩限制器的标定装置,包括:
17、传感器,被配置成检测物理量以得到对应输出信号值;
18、力矩限制器,被配置成采集传感器的输出信号值以确定对应的采集值;以及上述的控制器。
19、在本申请实施例中,传感器包括液压压力传感器、长度传感器、角度传感器、拉力传感器以及压力传感器中至少一者。
20、通过上述技术方案,可以通过获取物理量与传感器输出信号之间的映射关系以及传感器输出信号与力矩限制器的采集值之间的映射关系确定物理量与力矩限制器的采集值之间的映射关系,再根据获得的映射关系以及采集的物理量和与之对应的采集值确定传感器的安装误差,从而根据安装误差进行单点标定。由于标定采用的点数越多,标定耗时便越长,导致起重机出厂调试时间更长,本申请的技术方案采用基于力矩限制器的单点标定的方法,可以提高标点效率,减少现场调试的时间。
21、本申请的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种基于力矩限制器的标定方法,应用于起重机,其特征在于,所述方法包括:
2.根据权利要求1所述的标定方法,其特征在于,所述获取传感器的输出信号值与力矩限制器从所述传感器采集的与所述输出信号值对应的采集值之间的第一预设映射关系包括:
3.根据权利要求1所述的标定方法,其特征在于,所述获取所述传感器检测的所述起重机的历史物理量与所述传感器的对应输出信号值之间的第二预设映射关系包括:
4.根据权利要求3所述的标定方法,其特征在于,所述传感器包括液压压力传感器、长度传感器、角度传感器、拉力传感器以及压力传感器中的至少一者。
5.根据权利要求1所述的标定方法,其特征在于,所述获取所述力矩限制器采集的与所述第一物理量对应的第一采集值包括:
6.根据权利要求1所述的标定方法,其特征在于,根据所述第一安装误差、所述第一预设映射关系以及所述第二预设映射关系确定物理量与采集值之间的映射关系,以进行标定包括:
7.根据权利要求6所述的标定方法,其特征在于,根据所述第二安装误差以进行标定包括:
8.一种控制器,其特征在于,被配置成执行根据权利要求1至7中任意一项所述的基于力矩限制器的单点标定方法。
9.一种基于力矩限制器的标定装置,其特征在于,包括:
10.根据权利要求9所述的标定装置,其特征在于,所述传感器包括液压压力传感器、长度传感器、角度传感器、拉力传感器以及压力传感器中至少一者。
技术总结
本申请涉及工程机械领域,具体涉及一种基于力矩限制器的标定方法、控制器及标定装置。方法包括:获取传感器的输出信号值与力矩限制器从传感器采集的与输出信号值对应的采集值之间的第一预设映射关系;获取传感器检测的起重机的历史物理量与传感器的对应输出信号值之间的第二预设映射关系;采集传感器检测的起重机的第一物理量;获取力矩限制器采集的与第一物理量对应的第一采集值;根据第一物理量、第一采集值、第一预设映射关系以及第二预设映射关系确定传感器的第一安装误差;根据第一安装误差、第一预设映射关系以及第二预设映射关系确定物理量与采集值之间的映射关系,以进行标定。
技术研发人员:习可,袁海,郭启训,谢明中,林文
受保护的技术使用者:湖南中联重科智能技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!