举升装置的制作方法
1.本实用新型涉及机器人技术领域,具体涉及一种举升装置。
背景技术:
2.在自动化生产、物流运输等行业,经常需要通过举升装置将物品举升至一定高度,以进行下一步工作。现有的举升装置常见的包括丝杠式和连杆式的,其中,丝杠式的举升装置在举升方向上占用较大的空间,不利于节省空间,连杆式的举升装置,其由于自身结构问题,要准确控制行程需要通过复杂的运算。
3.上述的举升装置需要进行改进,以进一步简化其整体结构,并提升使用的灵活性。
技术实现要素:
4.本实用新型的发明目的在于提供一种举升装置,其将丝杠结构与连杆结构相结合,在保证举升高度的前提下,节省举升空间,并且行使控制方式简单。
5.为实现以上发明目的,本实用新型采取以下技术方案:
6.举升装置,包括举升机构和丝杠驱动机构,所述举升机构包括举升安装座和举升台,所述举升台设于所述举升安装座上,所述丝杠驱动机构横向设置,所述举升台与所述丝杠驱动机构通过连杆传动连接,所述丝杠驱动机构通过连杆带动所述举升台沿所述举升安装座上下移动。
7.与现有技术相比,本实用新型的举升装置,其包括举升机构和丝杠驱动机构,工作时,丝杠驱动机构的丝母沿丝杆正向或反向移动,并带动连杆的两端相对摆动,从而使举升台上升或下降,这种驱动方式简单,无需复杂的运算控制行程,且由于丝杠驱动机构横向设置,能降低装置的整体高度,从而节省举升方向的空间。
8.优选的,所述丝杠驱动机构包括传动丝杠副和驱动电机,所述传动丝杠副设置在所述举升安装座的侧部,所述驱动电机为所述传动丝杠副提供驱动力,所述连杆一端与所述传动丝杠副的滑块连接,另一端与所述举升台连接。在本方案中,通过驱动电机驱动传动丝杠副工作,使丝母沿丝杆滑动,并带动连杆的一端水平方向移动,使连杆的另一端上升或下降从而带动举升台沿举升安装座竖向移动。
9.优选的,所述举升机构还包括举升导轨结构,所述举升导轨结构包括举升滑轨和举升滑块,所述举升滑轨设置在所述举升安装座上,所述举升滑块设置在所述举升台上,所述举升台通过所述举升滑块可滑动的设置在所述举升滑轨上。
10.优选的,所述丝杠驱动机构还包括丝杠安装座、平移座和所述平移导轨结构,所述传动丝杠副、平移导轨结构均设设于所述丝杠安装座上,且所述平移导轨结构位于所述丝杆传动副的下侧,所述平移座设有贯穿其水平两端的中孔,其通过中孔套设在所述传动丝杠副的丝母上,并通过所述平移导轨结构滑动地设于所述丝杠安装座上,所述连杆与所述平移座连接。本方案为丝杠驱动机构的具体结构设计,本方案的丝杠驱动机构结构稳定且简单,便于加工和装配。
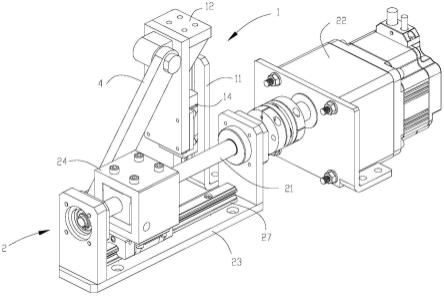
一端与所述传动丝杠副的滑块连接,另一端与所述举升台12连接。在本方案中,通过驱动电机22驱动传动丝杠副工作,使丝母沿丝杆滑动,并带动连杆4的一端水平方向移动,使连杆4的另一端上升或下降从而带动举升台12沿举升安装座11竖向移动。
30.上述举升机构1还包括举升导轨结构14,所述举升导轨结构14包括举升滑轨15和举升滑块16,所述举升滑轨15设置在所述举升安装座11上,所述举升滑块16设置在所述举升台12上,所述举升台12通过所述举升滑块16可滑动的设置在所述举升滑轨15上。
31.上述丝杠驱动机构2还包括丝杠安装座23、平移座24和所述平移导轨27结构26,所述传动丝杠副、平移导轨27结构26均设设于所述丝杠安装座23上,且所述平移导轨27 结构26位于所述丝杆传动副的下侧,所述平移座24设有贯穿其水平两端的中孔25,其通过中孔25套设在所述传动丝杠副21的丝母上,并通过所述平移导轨27结构26滑动地设于所述丝杠安装座23上,所述连杆4与所述平移座24连接。本方案为丝杠驱动机构2的具体结构设计,本方案的丝杠驱动机构2结构稳定且简单,便于加工和装配。
32.在一实施例中,所述平移导轨27结构26包括平移滑轨和平移滑块28,所述平移滑轨设置在丝杆安装座上,所述平移滑块28设于平移座24的底部,且所述平移滑块28与平移导轨27滑动连接。
33.在一实施例中,丝杆安装座包括两纵向设置的第一安装板30以及连接于两第一安装板 30下侧的第二安装板31,所述平移导轨27结构26设于所述第二安装板31的上端面,所述第一安装板30的上侧设有连接轴承32,所述传动丝杠副21的丝杆两端与连接轴承32连接。
34.上述平移座24与所述举升台12上均设有铰接结构,所述连杆4通过所述铰接结构分别与横移台、举升台12连接。
35.为实现驱动电机22的安装固定,所述丝杠驱动机构2还包括电机安装座29,所述驱动电机22设于所述电机安装座上,所述驱动电机22的输出轴通过联轴器33与所述传动丝杠副21的丝杆连接。
36.在一实施例中,上述举升台12包括托盘121和连接块122,所述连接块122竖向设置并与所述举升导轨结构14连接,所述托盘121设于连接块122的上侧。
37.在一实施例中,上述连杆4与水平面的最大夹角小于或等于45度。本方案可缩短平移座24的最大行程,从而节省水平空间。
38.在一实施例中,上述连杆4的长度设置为与所述举升台12的举升高度相等。
39.工作原理:
40.1、设平移座24行程为x,举升台12的行程为y,初始位置时,设连杆4两端直线距离为a,连杆4两端的水平距离为b,垂直距离为c,则由图7可知:y=√(a^2-(b-x)^2)-c。
41.2、由上图8可知,f1=f2,g1=g2,则丝杆所需的力f2=g1/tand,根据三角函数可知当 d大于45
°
时,f2少于g1,当d少于45
°
时f2大于g1,当d等于45
°
时,f2=g1。即当 d少于45
°
时,此举升机构1为费力省行程举升机构1,当d大于45
°
时,此机构为省力费行程举升机构1。
42.与现有技术相比,本实用新型的举升装置,其包括举升机构1和丝杠驱动机构2,工作时,丝杠驱动机构2的丝母沿丝杆正向或反向移动,并带动连杆4的两端相对摆动,从而使举升台12上升或下降,这种驱动方式简单,无需复杂的运算控制行程,且由于丝杠驱动机构
2横向设置,能降低装置的整体高度,从而节省举升方向的空间。
43.根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本实用新型并不局限于上面揭示和描述的具体实施方式,对本实用新型的一些修改和变更也应当落入本实用新型的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
技术特征:
1.举升装置,其特征在于:包括举升机构和丝杠驱动机构,所述举升机构包括举升安装座和举升台,所述举升台设于所述举升安装座上,所述丝杠驱动机构横向设置,所述举升台与所述丝杠驱动机构通过连杆传动连接,所述丝杠驱动机构通过连杆带动所述举升台沿所述举升安装座上下移动。2.根据权利要求1所述的举升装置,其特征在于:所述丝杠驱动机构包括传动丝杠副和驱动电机,所述传动丝杠副设置在所述举升安装座的侧部,所述驱动电机为所述传动丝杠副提供驱动力,所述连杆一端与所述传动丝杠副的滑块连接,另一端与所述举升台连接。3.根据权利要求2所述的举升装置,其特征在于:所述举升机构还包括举升导轨结构,所述举升导轨结构包括举升滑轨和举升滑块,所述举升滑轨设置在所述举升安装座上,所述举升滑块设置在所述举升台上,所述举升台通过所述举升滑块可滑动的设置在所述举升滑轨上。4.根据权利要求2所述的举升装置,其特征在于:所述丝杠驱动机构还包括丝杠安装座、平移座和平移导轨结构,所述传动丝杠副、平移导轨结构均设于所述丝杠安装座上,且所述平移导轨结构位于所述丝杆传动副的下侧,所述平移座设有贯穿其水平两端的中孔,其通过中孔套设在所述传动丝杠副的丝母上,并通过所述平移导轨结构滑动地设于所述丝杠安装座上,所述连杆与所述平移座连接。5.根据权利要求4所述的举升装置,其特征在于:所述平移座与所述举升台上均设有铰接结构,所述连杆通过所述铰接结构分别与横移台、举升台连接。6.根据权利要求2所述的举升装置,其特征在于:所述丝杠驱动机构还包括电机安装座,所述驱动电机设于所述电机安装座上,所述驱动电机的输出轴通过联轴器与所述传动丝杠副的丝杆连接。7.根据权利要求1所述的举升装置,其特征在于:所述举升台包括托盘和连接块,所述连接块竖向设置并与所述举升导轨结构连接,所述托盘设于连接块的上侧。8.根据权利要求1-7任一项所述的举升装置,其特征在于:所述连杆与水平面的最大夹角设置为小于或等于45度。9.根据权利要求1-7任一项所述的举升装置,其特征在于:所述连杆的长度设置为与所述举升台的举升高度相等。
技术总结
本实用新型公开一种举升装置,包括举升机构和丝杠驱动机构,所述举升机构包括举升安装座和举升台,所述举升台设于所述举升安装座上,所述丝杠驱动机构横向设置,所述举升台与所述丝杠驱动机构通过连杆传动连接,所述丝杠驱动机构通过连杆带动所述举升台沿所述举升安装座上下移动。本实用新型的举升装置,其包括举升机构和丝杠驱动机构,工作时,丝杠驱动机构的丝母沿丝杆正向或反向移动,并带动连杆的两端相对摆动,从而使举升台上升或下降,这种驱动方式简单,无需复杂的运算控制行程,且由于丝杠驱动机构横向设置,能降低装置的整体高度,从而节省举升方向的空间。从而节省举升方向的空间。从而节省举升方向的空间。
技术研发人员:苏毅宾 黎扬福 崔俊健
受保护的技术使用者:广东嘉腾机器人自动化有限公司
技术研发日:2021.06.10
技术公布日:2022/6/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1