一种塔式起重机用变幅防摇控制方法与流程
1.本发明涉及塔式起重机控制领域,特别是一种塔式起重机用变幅防摇控制方法。
背景技术:
2.在建筑施工领域,塔式起重机是必不可少的设备之一;塔式起重机带动货物进行变幅作业时,是通过变幅电机带动小车进行边度运动,从而带动小车上的通过缆绳连接的货物进行变幅运动,在小车加减速过程中,起重机势必会产生摇动现象,起重机摆动会影响起重机寿命并造成安全隐患。
3.为了消除变幅运动时的摇动,现有的塔式起重机都会配备防摇系统,一般是通过pid控制进行防摇控制,其中设定值通过操作人员手动设定,而输出值一般是通过传感器实时监测变幅电机的变幅速度来间接获取变幅小车的变幅速度;通过将变幅电机的变幅速度进行反馈,并与设定值进行比较,使pid控制自动进行防摇控制。
4.但此类防摇控制方法中,由于变幅电机带动变幅小车进行变幅过程中,变幅速度的传递存在一定延时和损失,导致实时回馈的变幅速度存在误差,pid控制器的自动防摇控制存在误差,导致整体防摇效果较差。
技术实现要素:
5.本发明的目的在于,提供一种塔式起重机用变幅防摇控制方法。本发明具有变幅防摇效果较好的优点。
6.本发明的技术方案:一种塔式起重机用变幅防摇控制方法,包括以下步骤,
7.a、操作人员设定小车期望的变幅运行速度v
期
;
8.b、根据变幅电机的传递函数,得出对应v
期
时变幅电机需要给小车的动力fx;
9.c、将fx作为设定值送入pid控制器,pid控制器根据fx来控制变幅电机带动小车进行变幅运动;
10.d、实时采集变幅电机的启动时间t和小车的位移x;再将位移x 和启动时间t进行微分计算,得到小车的实际速度v
实
;
11.e、将v
实
进行回馈,pid控制器根据v
实
和v
期
的偏差值来调节 kd参数;
12.f、设定防摇模块,根据防摇模块的传递函数,通过v
实
得出小车的实际受力f
实
;
13.g、将f
实
进行回馈,pid控制器根据f
实
和fx的偏差值来调节 kp参数;
14.h、pid控制器通过kp参数和kd参数,调节变幅电机运动状态,降低稳态误差,实现变幅防摇效果。
15.前述的一种塔式起重机用变幅防摇控制方法中,所述变幅电机的传递函数为
[0016][0017]
g是重力系数、m是塔机质量、m是载荷质量。
[0018]
前述的一种塔式起重机用变幅防摇控制方法中,所述防摇模块的传递函数为
[0019]
w是防摇模块的响应速度。
[0020]
前述的一种塔式起重机用变幅防摇控制方法中,所述步骤g中,在f
实
进行回馈过程中设置有用于调整摇摆程度的防摇增益sk。
[0021]
与现有技术相比,本发明通过变幅电机的传递函数,以设定小车期望的变幅运动速度作为输入量,得出输出量,即变幅电机需要给小车的动力fx;将fx作为设定值送入pid控制器,并通过编码器采集变幅电机的输出位移作为小车的位移x(数据采集较方便且延时和误差较小),并通过计时器采集变幅电机的启动时间t,位移x和启动时间t微分计算即可得出,小车的实际速度v
实
;通过防摇模块的传递函数,以小车的实际速度作为输入量,得出输出量,即小车的实际受力f
实
;将f
实
进行回馈,pid控制器根据f
实
和fx的偏差值来调节kp参数,f
实
大,kp增大,f
实
小,kp减小,f
实
与kp成正比,一直动态调整,使f
实
无限接近fx,防摇控制精度较高。
[0022]
同时,小车的实际速度v
实
也能进行回馈,pid控制器根据v
实
和v
期
的偏差值来调节kd参数,v
实
大,kd增大,v
实
小,kd减小,调整变量的微分,可以很好的降低静态误差,防摇控制稳定性较高。
[0023]
在f
实
进行回馈过程中设置有用于调整摇摆程度的防摇增益sk, sk可以根据实际的负重和吊绳长度进行人为设定调整,从而使f
实
能精准地反馈。
附图说明
[0024]
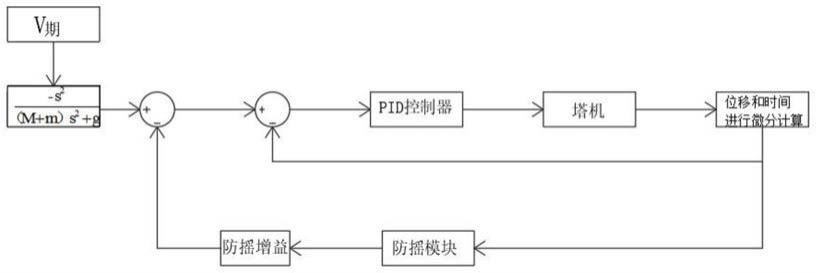
图1是本发明的控制流程示意图。
具体实施方式
[0025]
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
[0026]
实施例。一种塔式起重机用变幅防摇控制方法,构成如图1所示,包括以下步骤,
[0027]
a、操作人员设定小车期望的变幅运行速度v
期
;
[0028]
b、根据变幅电机的传递函数,得出对应v
期
时变幅电机需要给小车的动力fx;
[0029]
c、将fx作为设定值送入pid控制器,pid控制器根据fx来控制变幅电机带动小车进行变幅运动;
[0030]
d、实时采集变幅电机的启动时间t和小车的位移x;再将位移x 和启动时间t进行微分计算,得到小车的实际速度v
实
;
[0031]
e、将v
实
进行回馈,pid控制器根据v
实
和v
期
的偏差值来调节kd参数;
[0032]
f、设定防摇模块,根据防摇模块的传递函数,通过v
实
得出小车的实际受力f
实
;
[0033]
g、将f
实
进行回馈,pid控制器根据f
实
和fx的偏差值来调节 kp参数;
[0034]
h、pid控制器通过kp参数和kd参数,调节变幅电机运动状态,降低稳态误差,实现变幅防摇效果。
[0035]
所述变幅电机的传递函数为
[0036]
[0037]
g是重力系数、m是塔机质量、m是载荷质量。
[0038]
所述防摇模块的传递函数为
[0039]
w是防摇模块的响应速度。
[0040]
所述步骤g中,在f
实
进行回馈过程中设置有用于调整摇摆程度的防摇增益sk。
技术特征:
1.一种塔式起重机用变幅防摇控制方法,其特征在于:包括以下步骤,a、操作人员设定小车期望的变幅运行速度v
期
;b、根据变幅电机的传递函数,得出对应v
期
时变幅电机需要给小车的动力fx;c、将fx作为设定值送入pid控制器,pid控制器根据fx来控制变幅电机带动小车进行变幅运动;d、实时采集变幅电机的启动时间t和小车的位移x;再将位移x和启动时间t进行微分计算,得到小车的实际速度v
实
;e、将v
实
进行回馈,pid控制器根据v
实
和v
期
的偏差值来调节kd参数;f、设定防摇模块,根据防摇模块的传递函数,通过v
实
得出小车的实际受力f
实
;g、将f
实
进行回馈,pid控制器根据f
实
和fx的偏差值来调节kp参数;h、pid控制器通过kp参数和kd参数,调节变幅电机运动状态,降低稳态误差,实现变幅防摇效果。2.根据权利要求1所述的一种塔式起重机用变幅防摇控制方法,其特征在于:所述变幅电机的传递函数为g是重力系数、m是塔机质量、m是载荷质量。3.根据权利要求1所述的一种塔式起重机用变幅防摇控制方法,其特征在于:所述防摇模块的传递函数为w是防摇模块的响应速度。4.根据权利要求1所述的一种塔式起重机用变幅防摇控制方法,其特征在于:所述步骤g中,在f
实
进行回馈过程中设置有用于调整摇摆程度的防摇增益sk。
技术总结
本发明公开了一种塔式起重机用变幅防摇控制方法,它包括以下步骤,设定小车期望的变幅运行速度V期;根据变幅电机的传递函数,得出对应V期时小车需要的动力Fx;将Fx作为设定值送入PID控制器,PID控制器根据Fx来控制小车运动;实时采集启动时间T和小车的位移X;对T和X进行微分计算,得到小车的实际速度V实;将V实进行回馈,PID控制器根据V实和V期的偏差值来调节KD参数;设定防摇模块,根据防摇模块的传递函数,通过V实得出小车的实际受力F实;将F实进行回馈,PID控制器根据F实和Fx的偏差值来调节KP参数;PID控制器通过KP参数和KD参数,调节变幅电机运动状态,降低稳态误差,实现变幅防摇效果。本发明具有防摇效果较好的优点。本发明具有防摇效果较好的优点。本发明具有防摇效果较好的优点。
技术研发人员:张峰峰 程江龙 范俊红 马孝志 吴涛涛 黄人杰
受保护的技术使用者:义乌恒邦建筑智能科技有限公司
技术研发日:2022.07.06
技术公布日:2022/10/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1