一种用于火箭运输的均载托座及承载装置的制作方法
1.本发明涉及火箭运输领域,特别涉及一种运输火箭的均载托座及承载装置。
背景技术:
2.随着近几年商业航天技术的发展,传统的“三垂
”‑
垂直组装、垂直转运、垂直测试、起竖发射模式,由于其基础设施建设周期较长、维护成本较高的缺点逐渐显露出来,因此,商业火箭发射需要一种快速、灵活、低成本的发射模式来适应现阶段商业航天的发射需求。
3.借鉴国外成功的商业航天企业大多采用“三平”的测发模式,即水平组装、水平转运、水平测试、起竖发射的发射模式。因此,在火箭转载、转运和起竖过程中可靠地支撑箭体,使箭体在运输过程中受力比较均匀就显得尤为重要和关键,支撑火箭的装备的调节方式也是至关重量的。
4.发明人在日常实践中,发现现有的技术方案具有如下问题:
5.在重量较大的固体火箭在车辆转运过程中,由于车辆加速运动和地面起伏引起的不同方向加速度会引起火箭及其支架受力的不均匀,进而引起变形,传统单纯的刚性支撑会使箭体受到很大的额外支撑力,严重的情况下会使火箭发生变形损坏。另外,火箭长度较长,需要若干个托箭板的支撑,传统的多个托箭板的高度调节不能应对由于制造误差和变形引起的高度不一致的情况。
6.中国发明专利cn 110736388b火箭辅助液压支撑装置中设置功能类似,为单个支撑装置,但是其能够托举的火箭重量收到转轴的限制,托举重量较小,且托箭板仅仅可以左右滚转,缺少在起竖架不平整或者变形过程中,火箭箭心高度一致性的调节功能。
7.有鉴于此,实有必要提供一种新的技术方案以解决上述问题。
技术实现要素:
8.为解决上述技术问题,本技术提供一种用于火箭运输的均载托座及承载装置,能够对均载托座的高度及水平位置调节,使火箭在水平转运过程中受力均匀。
9.一种用于火箭运输的均载托座,包括:
10.固定座;
11.承托座;所述承托座上端包括与火箭外径相适应的托箭板;所述承托座下部包括承托斜面;所述承托斜面包括第一承托斜面和第二承托斜面;所述第一承托斜面与所述第二承托斜面呈v型设置;
12.升降装置;所述升降装置下端固设于所述固定座上;所述升降装置包括用于支撑所述承托座的支撑斜面;所述升降装置包括设置于所述承托座两侧能够独立升降的第一升降装置和第二升降装置;所述第一升降装置上端包括用于支撑所述第一承托斜面的第一支撑斜面;所述第二升降装置上端包括用于支撑所述第二承托斜面的第二支撑斜面;所述第一支撑斜面与所述第一承托斜面平行设置;所述第二支撑斜面与所述第二承托斜面平行设置;所述第一承托斜面相对于所述第一支撑斜面滑动设置;所述第二承托斜面相对于所述
第二支撑斜面滑动设置。
13.优选的,所述均载托座还包括对所述承托座竖直方向和水平方向进行位置限定的限位装置。
14.优选的,所述限位装置包括限位机构;所述限位机构沿火箭放置的长度设置于所述承托座的前后两侧;所述限位机构包括限位端头、限位块和直线驱动件;所述限位块与所述承托座固定连接;所述限位端头与所述直线驱动件移动端固定连接;所述限位端头包括限位斜面;所述限位块包括与所述限位斜面相适应且平行设置的固定斜面。
15.优选的,所述限位装置还包括限位支座和限位移动座;所述限位支座与所述固定座固定连接;所述限位移动座套设于所述限位支座上,与所述限位支座滑动连接;所述限位机构与所述限位移动座固定连接。
16.优选的,所述第一承托斜面与所述第二承托斜面的夹角范围为60
°
至120
°
。
17.优选的,所述第一支撑斜面和所述第二支撑斜面的表面固设支撑摩擦板。
18.优选的,所述第一承托斜面和第一承托斜面的表面固设承托摩擦板。
19.根据本技术的另一方面,还提供一种用于火箭运输的承载装置,包括所述用于承载火箭的均载托座和起竖架;所述均载托座沿所述起竖架长度方向固设于所述起竖架上。
20.与现有技术相比,本技术至少具有以下有益效果:
21.1、本发明依靠第一升降装置、第二升降装置以及承托座下部的承托面和升降装置的支撑斜面的共同作用,依靠简单的机构,既能够实现承托座在竖直方向的位置调整又能实现承托座在水平方向的调整,进而保证火箭箭心能够处于一条直线上,保证火箭在水平转运过程中的受力均衡和稳定性。
22.2、本发明能够依靠升降装置在竖直方向上的缓冲作用,保证承托座承载能力的稳定性,防止置于承托座的火箭由于径向受力突变而发生损伤,保证火箭在水平转运过程中受力均匀。
23.3、本发明能够依靠限位装置能够在不影响承托座进行竖直方向和水平方向调整的情况下,对承托座进行水平方向和高度方向的限位,有效避免调整失误而造成火箭箭体受损。
附图说明
24.后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附
25.图中:
26.图1为本发明均载托座实施例1的整体结构示意图;
27.图2为图1的侧视图;
28.图3为本发明承载装置的整体结构示意图;
29.图4为本发明均载托座实施例2的整体结构示意图;
30.图5为图4的侧视图;
31.图6为图4中a-a位置的剖视图;
32.图7为图6中b位置的局部放大图。
33.其中,上述附图包括以下附图标记:
34.1、固定座,2、升降装置,3、承托座,4、限位支座,5、限位移动座,6、限位连接座,7、限位机构;
35.21、第一升降装置,22、第二升降装置,23、第一支撑斜面,24、第二支撑斜面,25、升降端头,26、升降机构;
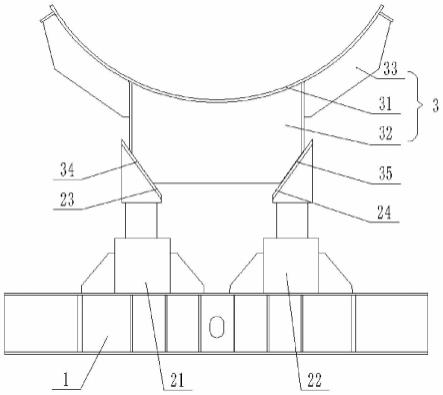
36.31、托箭板,32、承托座体,33、加强件,34、第一承托斜面,35、第二承托斜面;
37.71、直线驱动件,72、轨道槽,73、限位端头,74、限位斜面,75、限位块,76、固定斜面;
38.100、起竖架,200、均载托座。
具体实施方式
39.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.实施例1
41.如图1所示并参考图2,一种用于火箭运输的均载托座,包括固定座1、升降装置2和承托座3。升降装置2与固定座1固定连接,用于驱动承托座3升降。
42.承托座3包括托箭板31和承托座体32。托箭板31固设于承托座体32的上端,其具有与火箭外径相适应的弧形凹槽,用于对火箭箭体进行承托。承托座体32下部两侧面设置有承托斜面,所述承托斜面包括第一承托斜面34和第二承托斜面35。第一承托斜面34与第二承托斜面35呈v型设置。加强件33优选为肋板,对称固设于托箭板31的两侧面,用于对其进行加强,增加其强度。
43.升降装置2下端固设于固定座1上,包括升降机构26和设置于升降机构26移动端上端部的升降端头25。升降端头25上包括用于支撑承托座3的支撑斜面。升降机构26优选为与比例阀连通的具有恒定支撑力的伺服液压油缸,能够以恒力对承托座3进行支撑,进而使得均载托座能够以恒力对装载于其上部的火箭箭体进行支撑。具有恒定支撑力的伺服液压油缸属于成熟的现有技术,在此不再赘述。
44.具体的,升降装置2包括设置于承托座3两侧能够独立升降的第一升降装置21和第二升降装置22。第一升降装置21上端包括用于支撑第一承托斜面34的第一支撑斜面23,第二升降装置22上端包括用于支撑第二承托斜面35的第二支撑斜面24。第一支撑斜面23与第一承托斜面34平行设置,第二支撑斜面24与第二承托斜面35平行设置。同时,第一承托斜面34相对于第一支撑斜面23滑动设置,第二承托斜面35相对于第二支撑斜面24滑动设置,使得承托座3能够相对于第一升降装置21或第二升降装置22滑动,进而能够实现承托座3的高度及左右方向的位置调整。
45.第一支撑斜面23与第二支撑斜面24在水平方向的最大间距大于第一承托斜面34与第二承托斜面35在水平方向的最小间距,第一支撑斜面23与第二支撑斜面24在水平方向的最小间距小于第一承托斜面34与所述第二承托斜面35在水平方向的最大间距,使得升降装置2能够对承托座3进行支撑,不会由于第一升降装置21或第二升降装置22的独立升降而
造成承托座3位置变化,使得承托座3由第一升降装置21和第二升降装置22之间掉落。
46.优选的,第一承托斜面34与第二承托斜面35的夹角范围为60
°
至120
°
,在此角度范围内,第一支撑斜面23与第一承托斜面34之间以及第二支撑斜面24与第二承托斜面35之间的摩擦力适中,方便滑动,且具有良好的支撑性。
47.作为本发明的一个实施例,第一支撑斜面23和第二支撑斜面24的表面固设支撑摩擦板,利用支撑摩擦板能够减少升降端头25的磨损,延长均载托座的整体使用寿命。同时,利用支撑摩擦板能够减少第一支撑斜面23与第一承托斜面34之间以及第二支撑斜面24与第二承托斜面35之间的摩擦力,提高承托座3的位置调整效果。支撑摩擦板优选为铜板或高强度塑料板,高强度塑料可选用尼龙、超高分子聚乙烯、聚甲醛中的一种。
48.作为本发明的另一个实施例,第一承托斜面34和第一承托斜面35的表面固设承托摩擦板,利用承托摩擦板能够减少承托座3的磨损,延长均载托座的整体使用寿命。同时,利用承托摩擦板能够减少第一支撑斜面23与第一承托斜面34之间以及第二支撑斜面24与第二承托斜面35之间的摩擦力,提高承托座3的位置调整效果。承托摩擦板优选为铜板或高强度塑料板,高强度塑料可选用尼龙、超高分子聚乙烯、聚甲醛中的一种。
49.如图3所示,一种用于火箭运输的承载装置,包括用于承载火箭的均载托座200和起竖架100。均载托座200沿起竖架100长度方向固设于起竖架100上。均载托座200的数量依据火箭箭体的长度及重量设置,一般不少于3件。当均载托座200数量为5件时,承载装置具有良好的承载性能和具有较好的受力平衡,因此,承载装置上的均载托座200数量优选为5件。
50.工作原理:一种用于火箭运输的承载装置具有设置于承托座两侧能够相互独立的升降装置。在承托座两侧升降装置的共同升降作用下,能够将承托座进行顶升或下降,实现承托座在竖直方向上的调整,保证火箭箭心在竖直方向上位于同一直线上。
51.在承托座一侧升降装置的顶升作用下,另一侧升降装置保持高度不变或进行高度下降,使承托座左右两侧升降装置中的支撑斜面形成高度差,在重力作用下,支撑斜面与承托斜面能够发生滑动,以保持受力平衡,进而能够使承托座在水平方向上发生位置变化,使得承托座能够进行水平方向上的调整,保证火箭箭心在水平方向上位于同一直线上。
52.同时,升降装置的升降机构采用液压伺服油缸,能够保持恒力支撑,进而在承托座在竖直方向上发生受力突变时进行升降以实现类似压缩弹簧原理的缓冲,保证承托座承载能力的稳定性,防止置于承托座的火箭由于径向受力突变而发生损伤,保证火箭在水平转运过程中受力均匀。
53.一种用于火箭运输的承载装置依靠支撑斜面与承托斜面以及升降装置的共同作用,利用同一套装置实现多种功能,且承载能力强,能够对大重量的火箭进行平稳承托,保证火箭在水平转运过程中的稳定性和安全性。
54.工作过程:如图1-3所示,在火箭装载于承载装置之前,利用升降装置2对承托座3进行位置调整,修正由于加工以及安装造成的高度误差和水平误差,保证托箭板31处于合理的位置,保证能够对火箭进行有效承托。在火箭装载完成之后,进行微调,保证各承载装置对于火箭箭体承载能力的均衡性,同时调整水平位置,保证承托点的准确性。调整完成后对火箭进行固定并进行运输。
55.实施例2
56.实施例2同实施例1。不同之处仅在于:
57.如图4所示并参考图5和图6,一种用于火箭运输的均载托座还包括对承托座3竖直方向和前后方向进行限定的限位装置。所述限位装置包括限位支座4、限位移动座5和限位机构7。限位机构7沿火箭放置的长度设置于承托座3的前后两侧,用于进行限位。限位支座4与固定座1固定连接。限位移动5滑动套设于限位支座4上,限位支座4与限位移动5的连接处为的截面为多边形结构,使得限位移动座5能够沿限位支座4进行左右移动的同时,在前后方向也能够进行限位,防止限位移动5相对于限位支座4转动,避免对承托座3造成干涉和影响。限位机构7通过限位连接座6与限位移动座5固定连接。
58.如图7所示并参考图6,限位机构7包括直线驱动件71、轨道槽72、限位端头73和限位块75。限位端头73设置于轨道槽72内,其与直线驱动件71移动端固定连接,能够在直线驱动件71的驱动下沿轨道槽72进行水平方向移动。直线驱动件71优选为伺服液压油缸。除此之外,直线驱动件71也可选用普通液压油缸、电动推杆、气缸、滚珠丝杠等能够推动限位端头73进行直线运动的驱动机构。限位斜面74设置于限位端头73上。限位块75固设于承托座体32上。限位块75设置有与限位斜面74相适应的固定斜面76,限位斜面74与固定斜面76相互平行设置,依靠固定斜面76与限位斜面74配合对承托座3进行限位。依靠直线驱动件71对限位端头73的位置进行调整,进而调整限位斜面74与固定斜面76的间隙,保证承托座3处于能够在限定范围内移动或处于固定不动的状态。当承托座3在前后方向具有移动趋势时,依靠限位斜面74在前后方向对固定斜面76的限位作用,将承托座3限定在预设位置。当承托座3在竖直方向上进行升降时,其两侧的限位端头73依靠限位斜面74对固定斜面76在竖直方向的限位作用,防止承托座3在升降装置2的顶升作用下,高度过高。另外,在火箭放置于均载托座之前,也可以利用直线驱动件71带动限位端头73运动,依靠限位斜面74与固定斜面76紧密结合后推动承托座3在水平方向移动,进而实现承托座3进行前后方向的位置调整。
59.一种用于火箭运输的均载托座及承载装置的各部件之间紧密联系,构成完整的整体,能够实现均载托座在高度及水平位置上的调节,使火箭在水平转运过程中受力均匀功能,各部件之间不可单独割裂,相似功能单独部件的叠加并不能够解决本发明创造的相应技术问题。
60.为了便于描述,在这里可以使用空间相对术语,如“在......之上”、“在......上方”、“在......上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在......上方”可以包括“在......上方”和“在......下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
61.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
62.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第
二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
63.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1