基于机器视觉的全自动仓储机器人
1.本发明涉及仓储机器人技术领域,特别涉及一种基于机器视觉的全自动仓储机器人。
背景技术:
2.近十几年来,电商和快递行业的高速发展极大地拉动了对仓储自动化技术的需求,而仓储自动化的核心环节在于仓储机器人的自动化,货物需要由仓储机器人进行搬运和堆垛,因此仓储机器人的自动化技术与设计是目前本领域研究的重点。
3.目前,市场上的仓储机器人层出不穷,但普遍存在的问题是:1、传统的仓储机器人基本都是移动机器人搭配一个抓取机构或者机械臂,机器人的两个前轮是转向轮,两个后轮是主动轮,这样的结构造成机器人的转弯半径过大,要求运行空间较大;2、传统的仓储机器人的运行模式为半自动化模式,需要人远程操控,且只能完成单方向的抓取和堆垛。运行效率不高、工作能力较差,若要完成双向或多向的堆垛则会使得机械结构过于复杂、设计成本和维护成本较高。因此,设计一台具备自主识别功能、且能够完成多向抓取堆垛、灵活性高、功能完善的全自动仓储机器人是十分必要的。
技术实现要素:
4.本发明的目的在于提供一种基于机器视觉的全自动仓储机器人,解决了传统仓储机器人在工作时转弯半径过大需要较大的运行空间的技术问题,且无需人工操控,能够完成自主识别、多向抓取和堆垛。
5.本发明为解决上述技术问题采用的技术方案为:
6.一种基于机器视觉的全自动仓储机器人,包括:
7.车架;
8.行进机构,所述行进机构安装于所述车架的底部;
9.移动机构,所述移动机构设置于所述车架的顶部,用于带动摆臂式旋转升降机构在所述车架上平移;
10.摆臂式旋转升降机构,所述摆臂式旋转升降机构铰接于所述移动机构的底部,能够在所述移动机构上进行旋转;
11.拾取机构,所述拾取机构与所述摆臂式旋转升降机构的升降端连接,用于拾取目标货物;
12.储存机构,所述储存机构安装在所述车架的下部,用于储存货物;
13.图像获取装置和控制器,所述图像获取装置固定安装在所述拾取机构朝向目标货物的一侧,所述控制器分别与图像获取装置、行进机构、移动机构、摆臂式旋转升降机构、拾取机构及储存机构电连接,所述控制器通过对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在储存机构的对应位置信息,并控制行进机构、移动机构、摆臂式旋转升降机构、拾取机构以及储存机构同时协调作业将目标货物放置在堆垛区。
14.进一步地,所述摆臂式旋转升降机构包括两条平行设置的工作杆、工作平面以及伸缩组件,两条所述工作杆的一端铰接在所述移动机构的底部且在驱动元件的驱动下能够围绕着铰点转动,两条所述工作杆的另一端固定在所述工作平面上,所述伸缩组件的一端穿过所述工作平面,所述伸缩组件的另一端与所述拾取机构相连接。
15.进一步地,所述伸缩组件包括三根伸缩杆、滑轮组以及驱动电机,三根所述伸缩杆的一端伸出所述工作平面设置,其另一端与所述拾取机构连接,所述驱动电机安装在所述工作平面的底部,所述滑轮组由多个滑轮组成,其中一个滑轮连接在所述驱动电机的动力端,该滑轮与剩余所有滑轮通过钢丝绳连接,所述钢丝绳的另一端与三根所述伸缩杆连接。
16.进一步地,所述工作平面上设置有三角形的稳固架,所述稳固架的三个角套接在三根伸缩杆露出所述工作平面的一端,且两条所述工作杆与所述工作平面连接的一端固定在位于一侧的两根伸缩杆露出工作平面的一端上。
17.进一步地,三根所述伸缩杆伸出所述工作平面的一端均套接有限位套筒。
18.进一步地,所述拾取机构包括安装板、海绵吸盘、吸盘安装盘、通气管及气泵,所述安装板固定安装于三根所述伸缩杆的下部末端,所述气泵固定于所述安装板上,所述通气管的一端穿过安装板与所述气泵连接,所述通气管的另一端连接在所述吸盘安装盘上,所述海绵吸盘安装于吸盘安装盘的底部,且与所述通气管相通。
19.进一步地,所述移动机构由一横杆和两个滑块组成,两个所述滑块滑动连接在所述车架顶部的两个横梁上,且两个所述滑块中分别设置有滑轮;所述横杆的两端分别连接两个所述滑块,且所述横杆上连接一驱动元件,在驱动元件的带动下能够沿着所述车架的横梁平移。
20.进一步地,所述储存机构包括储存箱、滑轨及与所述滑轨适配的导轨,所述导轨固定在所述车架的底板上,所述滑轨与所述导轨滑动连接,所述储存箱的底部分别固定在两个所述滑轨上,所述储存箱在两个所述滑轨的带动下沿着导轨移动。
21.进一步地,所述储存箱的底壁两侧分别设置有托物底板,且所述托物底板与所述储存箱的侧板为活动连接或转动连接,所述储存箱的一个侧面为开口侧。
22.进一步地,所述行进机构由两个主动轮和两个辅助轮组成,两个主动轮和两个辅助轮呈对角布置。
23.与现有仓储机器人相比,本发明提供的一种基于机器视觉的全自动仓储机器人改变以往的垂直升降方式,采用摆臂式旋转升降机构,该摆臂式旋转升降机构能够在驱动元件的带动下在车架上完成近似180度范围内的旋转,并且该摆臂式旋转升降机构在移动机构的带动下能够在车架上平移,使得与其连接的拾取机构能够完成多角度的目标货物拾取,实现了机械臂的精准移动,在空间较小的仓库中也可以正常运行;同时,本发明提供的仓储机器人通过图像获取装置对待抓取的目标货物进行识别,并对采集到的货物图像信息进行分析处理后得到目标货物应放置在储存机构的对应位置信息,通过控制器协调控制移动机构和摆臂式旋转升降机构进行移动调整到目标货物的位置后进行抓取,并将抓取上来的货物放置在对应的储存机构上,之后通过行进机构移动到指定位置将货物卸载在待存放区域。本发明将小巧的机械结构最大化利用,使得仓储机器人具备多角度、多向抓取堆垛的功能,实现了仓储机器人的全自动智能化抓取及堆垛过程,无需任何人工操作,大大提高了仓储物流的运输作业效率。
附图说明
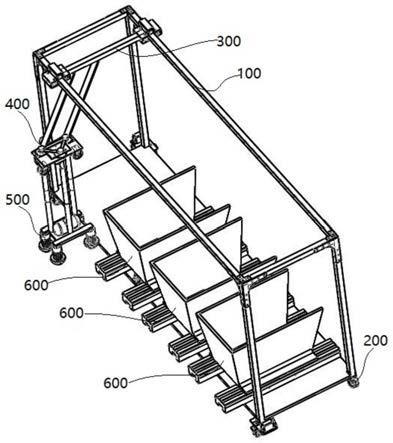
24.图1是本发明基于机器视觉的全自动仓储机器人的整体结构示意图;
25.图2是图1的另一角度整体结构示意图;
26.图3是本发明所述移动机构、摆臂式旋转升降机构以及拾取机构之间的连接关系示意图;
27.图4是本发明所述伸缩组件的放大图;
28.图5是本发明所述工作平面的放大图;
29.图6是本发明所述拾取机构的结构示意图;
30.图7是本发明所述行进机构的机构示意图。
31.图中所示:
32.100-车架;
33.200-行进机构,210-主动轮,220-辅助轮;
34.300-移动机构,310-横杆,320-滑块;
35.400-摆臂式旋转升降机构,410-工作杆,420-工作平面,421-稳固架,422-限位套筒,430-伸缩组件,431-伸缩杆,432-滑轮,433-驱动电机;
36.500-拾取机构,510-安装板,520-海绵吸盘,530-吸盘安装盘,540-通气管,550-气泵;
37.600-储存机构,610-储存箱,620-滑轨,630-导轨,640-托物底板。
具体实施方式
38.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
39.本发明选取箱型结构的货物作为目标货物,设计一种基于机器视觉的全自动仓储机器人,为保证该仓储机器人的抗扭性及稳定性,本发明运用机器视觉技术以及真空吸盘原理使机器人能够准确识别并抓取目标货物;采用摆臂式旋转升降机构实现机械臂的精准移动;运用plc控制技术实现机器人运行过程中的自动抓取与自动行驶;运用雷达测距技术使机器人准确通过障碍物;运用红外线感应技术识别与货物相对应的堆垛区并在有限范围内合理放置货物;同时,通过储存机构减少了机器人的行驶路程以及时间,提高了运输效率,实现了多个货物高效准确运输的工作目的。
40.如图1和2所示,本发明提供一种基于机器视觉的全自动仓储机器人,它包括车架100、行进机构200、移动机构300、摆臂式旋转升降机构400、拾取机构500、储存机构600及图像获取装置和控制器,所述行进机构200安装于所述车架100的底部;所述移动机构300设置于所述车架100的顶部,用于带动摆臂式旋转升降机构400在所述车架100上平移;所述摆臂式旋转升降机构400铰接于所述移动机构300的底部,并能够在所述移动机构300上进行旋转;所述拾取机构500与所述摆臂式旋转升降机构400的升降端连接,用于拾取目标货物;所述储存机构600安装在所述车架100的下部,用于储存货物;所述图像获取装置固定安装在所述拾取机构500朝向目标货物的一侧,所述控制器分别与图像获取装置、行进机构200、移动机构300、摆臂式旋转升降机构400、拾取机构500及储存机构600电连接,所述控制器通过
对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在储存机构600的对应位置信息,并控制行进机构200、移动机构300、摆臂式旋转升降机构400、拾取机构500以及储存机构600同时协调作业将目标货物放置在堆垛区。
41.本发明的上述技术方案中,一改传统仓储机器人垂直升降的形式,设计了摆臂式旋转升降机构400,该摆臂式旋转升降机构400能够在驱动元件的带动下在车架100上完成近似180
°
范围内的旋转,并且该摆臂式旋转升降机构400在移动机构300的带动下能够在车架100上平移,使得与其连接的拾取机构500能够完成多角度、多方向的目标货物拾取,实现了机械臂的精准移动,从而使得仓储机器人在空间较小的仓库中也可以正常运行。
42.同时,通过行进机构200实现小车的全方位移动,当小车移动到指定位置时,通过图像获取装置对待抓取的目标获取进行标识识别,这些标识包括货物的颜色、形状等特征,判断需要抓取的目标货物,将信号反馈给控制器,控制器控制移动机构300和摆臂式旋转升降机构400将拾取机构500移动至目标货物的正上方并向下抓取货物,将货物放置在对应的储存机构600上,同时移动机构300和摆臂式旋转升降机构400继续运动,带动拾取机构500继续抓取货物,当储存机构600上均装满货物后,控制器控制行进机构2使得小车移动到指定的堆垛区域卸货,完成自动运输功能。
43.其中,为了更好地获取目标货物的特征,所述图像获取装置采用ccd摄像头,所述ccd摄像头优选地安装在所述拾取机构500的海绵吸盘上,离被测物体比较近,以便于识别目标货物。所述控制器采用树莓派作为上位机,采用stm32f4作为下位机,通过对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在存放机构的对应位置信息,并将该对应的位置信息传输给下位机,由下位机控制行进机构200、储存机构600同时协调作业将目标货物放置在堆垛,控制完成机器人从目标识别、抓取、转运及卸货的自动化全过程,实现整机的无人操作。
44.具体的,如图3所示,所述摆臂式旋转升降机构400包括两条平行设置的工作杆410、工作平面420以及伸缩组件430,两条所述工作杆410的一端铰接在所述移动机构300的底部且在驱动元件的驱动下能够围绕着铰点转动,两条所述工作杆410的另一端固定在所述工作平面420上,所述伸缩组件430的一端穿过所述工作平面420,所述伸缩组件430的另一端与所述拾取机构500相连接。
45.进一步的,如图4所示,所述伸缩组件430包括三根伸缩杆431、滑轮组以及驱动电机433,三根所述伸缩杆431的一端伸出所述工作平面420设置,其另一端与所述拾取机构500连接,所述驱动电机433安装在所述工作平面420的底部,所述滑轮组由多个滑轮432组成,其中一个滑轮432连接在所述驱动电机433的动力端,该滑轮432与剩余所有滑轮432通过钢丝绳连接(钢丝绳在附图中未画出),所述钢丝绳的另一端与三根所述伸缩杆431连接,如此,启动驱动电机433可带动其中一个滑轮432转动,进而通过钢丝绳的连接作用带动其余的滑轮432转动,从而使得钢丝绳另一端连接的伸缩杆431发生上下的升降运动。此处,本发明采用钢丝绳带动伸缩杆431运动的方式可防止伸缩杆431晃动。
46.进一步地,如图5所示,所述工作平面420上设置有三角形的稳固架421,所述稳固架421的三个角套接在三根伸缩杆431露出所述工作平面420的一端,且两条所述工作杆410与所述工作平面420连接的一端固定在位于一侧的两根伸缩杆431露出工作平面420的一端上。同时,三根所述伸缩杆431伸出所述工作平面420的一端均套接有限位套筒422。
47.具体的,如图6所示,所述拾取机构500包括安装板510、海绵吸盘520、吸盘安装盘530、通气管540及气泵550,所述安装板510固定安装于三根所述伸缩杆431的下部末端,所述气泵550固定于所述安装板510上,所述通气管540的一端穿过安装板510与所述气泵550连接,所述通气管540的另一端连接在所述吸盘安装盘530上,所述海绵吸盘520安装于吸盘安装盘530的底部,且与所述通气管540相通。
48.具体的,如图1、2结合图3所示,所述移动机构300由一横杆310和两个滑块320组成,两个所述滑块320滑动连接在所述车架100顶部的两个横梁上,且两个所述滑块320中分别设置有滑轮;所述横杆310的两端分别连接两个所述滑块320,且所述横杆310上连接有外部驱动元件,在驱动元件的带动下能够沿着所述车架100的横梁平移,进一步带动了摆臂式旋转升降机构400在车架100上的平移。
49.具体的,如图1和2所示,所述储存机构600包括储存箱610、滑轨620及与所述滑轨适配的导轨630,所述导轨630固定在所述车架100的底板上,所述滑轨620与所述导轨630滑动连接,所述储存箱610的底部分别固定在两个所述滑轨620上,所述储存箱610在两个所述滑轨620的带动下沿着导轨630移动。
50.进一步地,所述储存箱610的底壁两侧分别设置有托物底板640,且所述托物底板640与所述储存箱610的侧板为活动连接或转动连接,当所述储存箱610在滑轨620的带动下从导轨630移出至最大距离后,搬动或拆卸掉托物底板640,放在对应储存箱610中的货物自动掉落下指定堆垛区范围内,完成卸货。
51.进一步地,所述储存箱610的一个侧面设计为开口侧,这样设计的目的是便于货物放入储存箱610中或从储存箱610中落到堆垛区。
52.具体的,如图7所示,所述行进机构200由两个主动轮210和两个辅助轮220组成,两个主动轮210和两个辅助轮220呈对角布置,保证机器人在转向后的运动稳定性、均匀性与一致性;主动轮210上安装舵机,通过控制连杆转动方向来控制主动轮210的转向。
53.另外,在本发明仓储机器人的前后两面安装有激光测距雷达,当机器人进行避障时,通过激光测距雷达测距采集数据,再将二维障碍信息转化为一维编码信息bp神经网络的输入,简化复杂繁琐的信息,将避障动作质量作为网络的输出,使机器人两侧与障碍物保持在一个安全距离内通过,实现精准避障。
54.并且,在机器人的底部还安装有红外线接头,所述红外线接头由菲涅尔透镜、红外传感器、节能自动电源开关集成电路及少量电阻电容组成。当机器人运动到堆垛区附近,红外线接头收到从堆垛区发射出的红外线后,集成电路输出电压变成高电平,红外线开关利用此高电平控制其他执行电路动作,完成货物的卸载与正确堆垛任务。
55.综上,本发明将小巧的机械结构最大化利用,使得仓储机器人具备多角度、多向抓取堆垛的功能,实现了仓储机器人的全自动智能化抓取及堆垛过程,无需任何人工操作,大大提高了仓储物流的运输作业效率。
56.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1