一种称重取放装置及其测量方法与流程
本发明涉及取放物体领域,尤其涉及一种称重取放装置及其测量方法。
背景技术:
1、目前,在日化、食品、饮料、五金、贸易、制药、锂电等领域的自动化生产线,产品重量数据的获取越来越成为品质筛选的一个重要方式,以往的解决方案往往通过抓取机构或输送机构将物体运到称重装置上,称重完成后又由抓取机构搬运或输送到别处,这种方案往往需要将取料和称重分别由不同的设备或仪器来实现,造成设备结构复杂、体积较大,而且集成度低,数据处理复杂,成本高。
2、因此,结合上述存在的技术问题,有必要提供一种新的技术方案。
技术实现思路
1、为解决现有技术中存在的技术问题,本发明提供一种称重取放装置及其测量方法,所述装置既可采用具有夹持组件的夹爪,也可采用具有吸附组件的吸盘,不仅能够静止状态下测量被取放物体的重量或重力,同时在运动过程中也能测量,极大的方便客户使用,节约生产时间,提高生产效率。具体技术方案如下所述:
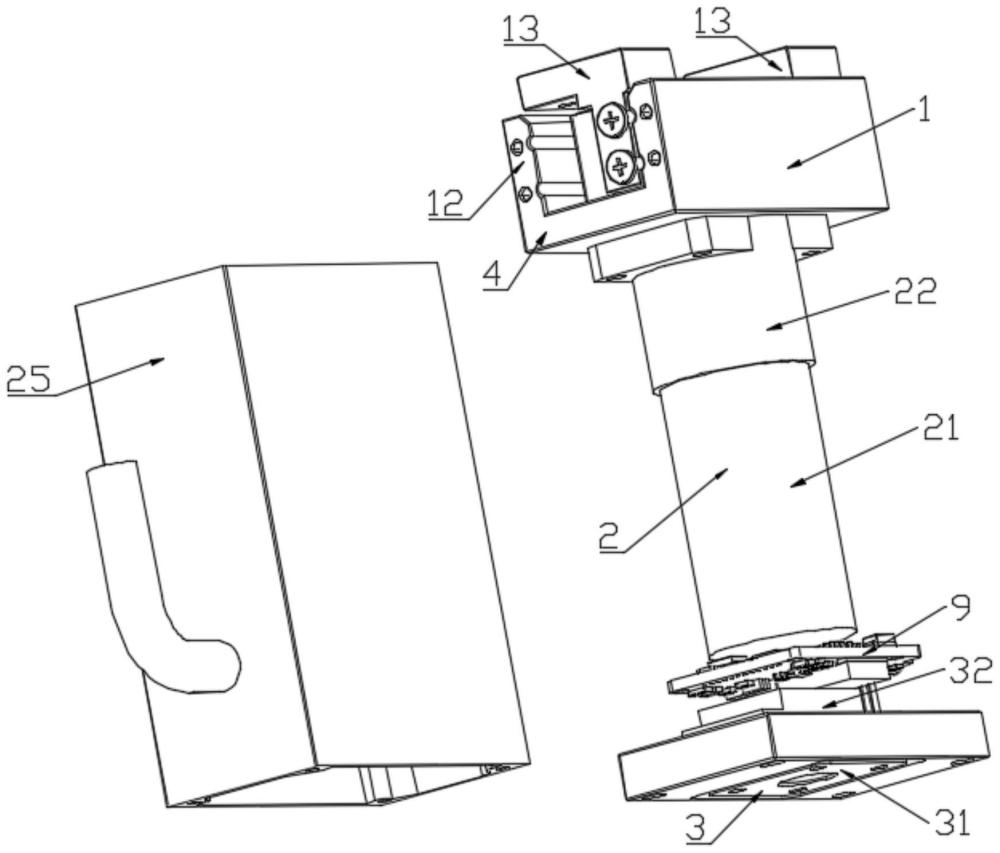
2、根据本发明的一方面,提供了一种称重取放装置,包括取放组件、驱动组件和检测组件;
3、所述取放组件包括基座和安装于基座上的夹爪,驱动组件与取放组件相连接,驱动组件能够驱动夹爪打开或闭合;
4、检测组件能够检测被取放物体的重力。
5、优选的,检测组件包括力检测传感器,力检测传感器能够检测被取放物体的重力。
6、优选的,检测组件还包括多轴运动处理组件,多轴运动处理组件能够检测被取放物体在运动过程中的干扰因子。
7、优选的,驱动组件上设置有齿轮;
8、夹爪包括滑块和固定安装于滑块上的手指,滑块安装于基座上,滑块上设置有齿条,齿条与齿轮相啮合,所述滑块有两个,两个滑块分别设置于齿轮的两侧。
9、优选的,基座和滑块之间设置有滚珠,基座和滑块通过滚珠连接。
10、优选的,基座上设置有至少一个滚动柱,所述滚动柱设置于两个滑块之间。
11、优选的,驱动组件还包括驱动电机和减速器;
12、所述减速器与驱动电机的转轴相连接,减速器的输出端固定连接有齿轮,减速器的输出端伸入至基座内。
13、根据本发明的另一方面,提供了一种称重取放装置,其特征在于,包括取放组件、驱动组件和检测组件;所述取放组件包括至少一个吸附件,驱动组件包括气路管道、抽气结构和流体控制机构;
14、气路管道包括抽气气路和排气气路,抽气结构和吸附件通过抽气气路相连接,排气气路的一端设置有释放端,排气气路的另一端与吸附件相连接;流体控制机构能够控制抽气气路相连通或排气气路相连通;
15、拿取被取放物体时,流体控制机构被配置的打开抽气气路,吸附件通过抽气结构吸附被取放物体;释放被取放物体时,流体控制机构被配置的打开排气气路,吸附件释放被取放物体于指定位置;检测组件能够检测被取放物体的重力。
16、优选的,检测组件包括力检测传感器,力检测传感器能够检测被取放物体的重力。
17、优选的,检测组件还包括多轴运动处理组件,多轴运动处理组件能够检测运动过程中的被取放物体的干扰因子。
18、优选的,还包括气路主体,气路管道设置于气路主体内,气路主体内开设有吸附气腔、抽气腔和排气腔,吸附气腔、抽气腔和排气腔相互独立;
19、气路主体表面还开设有吸附孔、释放孔、第一连接口、第二连接口、第三连接口和抽气孔;吸附孔和第一连接口均与吸附气腔相连通,第二连接口和抽气孔均与抽气腔相连通,第三连接口和释放孔均与排气腔相连通,吸附件固定设置于吸附孔上,抽气孔与抽气结构相连接;
20、流体控制机构上设置有第一流体控制口、第二流体控制口和第三流体控制口,第一流体控制口与第一连接口相连接,第二流体控制口与第二连接口相连接,第三流体控制口与第三连接口相连接,流体控制机构能够控制第一流体控制口与第二流体控制口连通或第一流体控制口与第三流体控制口连通。
21、根据本发明的又一方面,提供了一种如上述称重取放装置的测量方法,还包括控制系统,控制系统与控制板通讯连接,控制系统包括驱控模块和检测模块,驱控模块控制取放组件和驱动组件的动作,检测模块控制检测组件的动作,具体包括如下步骤:
22、s1:驱控模块初始化,检测模块零漂矫正;
23、s2:取放组件拿取被取放物体;
24、s3:力检测传感器采集第一数据;
25、s4:控制系统对第一数据进行滤波和转化处理,并将力检测传感器采集到的第一数据转化为被取放物体的重力。
26、优选的,检测组件还包括多轴运动处理组件,多轴运动处理组件能够检测加速运动过程中的被取放物体的干扰因子;
27、步骤s2中,取放组件拿取被取放物体,称重取放装置被驱动的加速移动;
28、还包括如下步骤:
29、s5:多轴运动运动处理组件采集第二数据,控制系统对第二数据进行噪声干扰去除;
30、s6:使用步骤s5获得的处理后的第二数据,对步骤s4获得的处理后的第一数据进行补偿处理,得到被取放物体的重力,补偿处理公式如下:
31、(m1+m2)*(g+a)=g
32、其中,m1为夹爪或吸盘的质量;m2为被取放物体的质量;g为重力加速度;a为被取放物体与夹爪或吸盘的整体在运动过程中对重力测量产生影响的等效加速度,即第二数据;g为力检测传感器测量的被取放物体与夹爪或吸盘的整体受力,即第一数据。
33、与现有技术相比,本专利所述技术方案至少具有如下一个或多个有益效果:
34、本专利所述装置既可采用具有夹持组件的夹爪,也可采用具有吸附组件的吸盘,在夹取的过程中同时可以测量被取放物体的重量或重力,集成化设计,方便客户使用,减少客户再配置称重装置,既节约空间,又降低使用成本,同时本装置采用力检测传感器和多轴运动处理组件配合使用,不仅能够静止状态下测量被取放物体的重量或重力,同时在运动过程中也能测量,无需等待被取放物体静止再测量,大大节约了客户的时间,提高了客户的工作效率,在技术和使用上获得了重大突破。
35、夹持组件设置滚动体,滚动体可以是滚珠,也可以是滚动柱,夹持组件由滚动体在滑块与基座之间滚动,减少滑块与基座之间的摩擦,使得滑块能沿着滑轨轻易的以高精度作线性运动。
36、夹持组件设置滚动柱,既能够限位滑块在滑块槽内移动,有助于滑块稳步移动,避免移动时发生晃动甚至卡壳,同时也减少滑块与滑块槽侧壁的摩擦力,避免磨损,有助于延长装置的使用寿命及控制移动精度。
37、设置第一过滤结构和第二过滤结构,以避免气路管道和抽气结构内进入颗粒物,起到延长装置使用寿命的作用。
38、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种称重取放装置,其特征在于,包括取放组件(1)、驱动组件(2)和检测组件(3);
2.根据权利要求1所述的称重取放装置,其特征在于,检测组件(3)包括力检测传感器(31),力检测传感器(31)能够检测被取放物体的重力。
3.根据权利要求2所述的称重取放装置,其特征在于,检测组件(3)还包括多轴运动处理组件(32),多轴运动处理组件(32)能够检测被取放物体在运动过程中的干扰因子。
4.根据权利要求1所述的称重取放装置,其特征在于,驱动组件上设置有齿轮(23);
5.根据权利要求4所述的称重取放装置,其特征在于,基座和滑块之间设置有滚珠,基座和滑块通过滚珠连接。
6.根据权利要求4所述的称重取放装置,其特征在于,基座上设置有至少一个滚动柱,所述滚动柱设置于两个滑块之间。
7.根据权利要求1所述的称重取放装置,其特征在于,驱动组件(2)还包括驱动电机(21)和减速器(22);
8.一种称重取放装置,其特征在于,包括取放组件(1)、驱动组件(2)和检测组件(3);所述取放组件(1)包括至少一个吸附件(51),驱动组件包括气路管道(52)、抽气结构(53)和流体控制机构(54);
9.根据权利要求8所述的称重取放装置,其特征在于,检测组件(3)包括力检测传感器(31),力检测传感器(31)能够检测被取放物体的重力。
10.根据权利要求9所述的称重取放装置,其特征在于,检测组件(3)还包括多轴运动处理组件(32),多轴运动处理组件(32)能够检测运动过程中的被取放物体的干扰因子。
11.根据权利要求8所述的称重取放装置,其特征在于,还包括气路主体(55),气路管道(52)设置于气路主体(55)内,气路主体(55)内开设有吸附气腔(561)、抽气腔(562)和排气腔(563),吸附气腔(561)、抽气腔(562)和排气腔(563)相互独立;
12.一种如权利要求1-11任一项所述的称重取放装置的测量方法,其特征在于,还包括控制系统,控制系统与控制板通讯连接,控制系统包括驱控模块和检测模块,驱控模块控制取放组件和驱动组件的动作,检测模块控制检测组件的动作,具体包括如下步骤:
13.根据权利要求12所述的称重取放装置的测量方法,其特征在于,检测组件还包括多轴运动处理组件(32),多轴运动处理组件(32)能够检测加速运动过程中的被取放物体的干扰因子;
技术总结
本发明公开了一种称重取放装置及其测量方法,包括取放组件、驱动组件和检测组件;所述取放组件上设置有吸附件或夹爪,驱动组件与取放组件相连接,驱动组件能够驱动吸附件吸附或释放被取放物体、或驱动夹爪打开或闭合;检测组件能够检测被取放物体的重量或重力。本专利所述装置既可采用具有夹持组件的夹爪,也可采用具有吸附组件的吸盘,在夹取的过程中同时可以测量被取放物体的重量或重力,集成化设计,方便客户使用,减少客户再配置称重装置,既节约空间,又降低使用成本,同时本装置采用力检测传感器和多轴运动处理组件配合使用,不仅能够静止状态下测量被取放物体的重量或重力,同时在运动过程中也能测量,无需等待被取放物体静止再测量,大大节约了客户的时间,提高了客户的工作效率,在技术和使用上获得了重大突破。
技术研发人员:胡忠,刘璐,王全,赵怀山,张常森,顾磊磊,介党阳
受保护的技术使用者:苏州钧舵机器人有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!