交叉带分拣机及其处理方法与流程
本申请涉及分拣,特别是涉及一种交叉带分拣机和一种交叉带分拣机的处理方法。
背景技术:
1、交叉带分拣设备一般是由主驱动带式输送机和载有带式输送机的小车(即运输设备)联接在一起的分拣系统,其中,主驱动带式输送机与小车上的带式输送机呈交叉状。运输设备的类型有两种,分为单个运输设备与组合运输设备。其中,组合运输设备由两个相邻的运输设备组成,相邻的两个运输设备可通过相应的连接组件连接,如通过风琴罩连接。
2、在采用交叉带分拣设备进行分拣时,主驱动带式输送机将物流对象传送到运输设备上,由运输设备在交叉带分拣设备的循环轨道上移动并在达到相应的格口时投放物流对象,完成分拣。因此需要确定循环轨道的运行速度以及运输设备的位置,从而才能进行分拣。
3、目前,交叉带分拣设备对主环运行速度的测量不够准确,也导致运输设备的定位不准确,影响处理效率。
技术实现思路
1、本申请实施例提供了一种交叉带分拣机的处理方法,以提高处理效率。
2、相应的,本申请实施例还提供了一种交叉带分拣机的处理装置、一种交叉带分拣机和一种机器可读介质,用以保证上述方法的实现及应用。
3、为了解决上述问题,本申请实施例公开了一种交叉带分拣机,所述交叉带分拣机包括:主驱动带式输送机、运输设备和主环轨道;其中:
4、所述主驱动带式输送机与小车上的带式输送机呈交叉状,两个运输设备通过连接件连接构成整车,在主环轨道上移动;
5、所述运输设备具有驱动组件,所述运输设备通过所述驱动组件的驱动在主环轨道的导轨上移动;
6、所述运输设备的驱动组件上设置有测速孔,在测速孔下设置有定位孔的运输设备为初始运输设备;
7、所述主环轨道上设置有测速组件和定位组件;
8、所述定位组件,在初始运输设备通过时触发定位信号,以基于所述定位信号将计数器复位;
9、所述测速组件,在整车中两个运输设备通过时触发定位信号,以基于所述定位信号确定主环轨道的运行速度并更新计数器的计数值,基于所述运行速度和计数值确定运输设备的位置信息。
10、可选的,所述测速组件包括第一测速组件和第二测速组件,所述第一测速组件和第二测速组件水平设置,所述定位组件与第二测速组件竖直设置;
11、所述第一测速组件,在整车中两个运输设备通过时触发第一测速信号,以基于两次触发的第一测速信号确定主环轨道的运行速度;
12、所述第二测速组件,在运输设备通过时触发第二测速信号,以基于所述第二测速信号更新计数器的计数值,并对所述主环轨道的运行速度进行调整。
13、可选的,所述定位组件包括定位光电器件,所述测速组件包括测速光电器件。
14、本申请实施例还公开了一种交叉带分拣机的处理方法,所述交叉带分拣机的运输设备具有驱动组件,所述运输设备通过所述驱动组件的驱动在主环导轨上移动;其中,所述主环轨道上设置有测速组件和定位组件,所述运输设备的驱动组件上设置有测速孔,在初始运输设备的测速孔下设置有定位孔,所述方法包括:
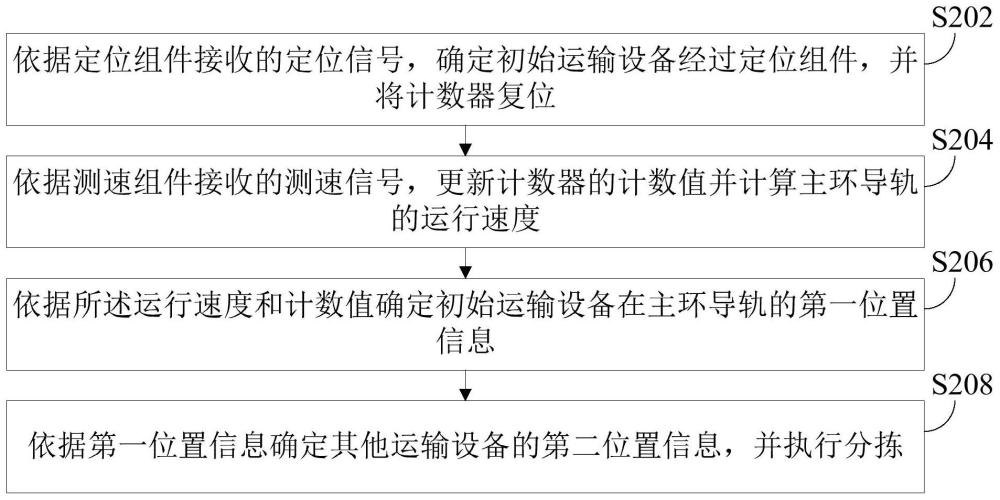
15、依据定位组件接收的定位信号,确定初始运输设备经过定位组件,并将计数器复位;
16、依据测速组件接收的测速信号,更新计数器的计数值并计算主环导轨的运行速度;
17、依据所述运行速度和计数值确定初始运输设备在主环导轨的第一位置信息;
18、依据第一位置信息确定其他运输设备的第二位置信息,并执行分拣。
19、可选的,所述测速组件包括第一测速组件和第二测速组件,所述第一测速组件和第二测速组件水平设置,所述定位组件与第二测速组件竖直设置;
20、所述依据测速组件接收的测速信号,计算主环导轨的运行速度的步骤,包括:
21、基于整车中两个运输设备通过第一测速组件时触发的第一测速信号,确定两次触发第一测速信号的第一时间和第二时间;
22、基于所述第一时间、第二时间和整车的截距,计算所述主环导轨的运行速度。
23、可选的,所述基于所述第一时间、第二时间和整车的截距,计算所述主环导轨的运行速度,包括:
24、基于所述第一时间、第二时间和整车的截距,计算所述主环导轨的第一速度;
25、基于所述第一速度、速度偏差参数和距离偏差参数,确定所述主环导轨的运行速度。
26、可选的,所述基于所述第一时间、第二时间和整车的截距,计算所述主环导轨的第一速度,包括:
27、基于所述第一时间和第二时间确定第一时间差;
28、基于所述第一时间差和整车的截距,计算所述主环导轨的第一速度。
29、可选的,所述基于所述第一速度、速度偏差参数和距离偏差参数,确定所述主环导轨的运行速度,包括:
30、基于所述第一速度和速度偏差参数,确定速度校正值;
31、计算运输设备通过第二测速组件和第一测速组件的第二时间差;
32、基于距离偏差参数、第二时间差对所述速度校正值进行调整,得到所述主环导轨的运行速度。
33、可选的,依据所述运行速度和计数值确定初始运输设备在主环导轨的第一位置信息,包括:
34、基于计数值和整车的截距,确定初始运输设备在主环导轨的移动位置信息;
35、依据所述运行速度对所述移动位置信息进行校正,确定所述初始运输设备在主环导轨的第一位置信息。
36、可选的,所述依据所述运行速度对所述移动位置信息进行校正,确定所述初始运输设备在主环导轨的第一位置信息,包括:
37、确定当前时刻和最后触发第二测速组件的时刻的第三时间差;
38、采用所述运行速度、第三时间差对所述移动位置信息进行校正,确定所述初始运输设备在主环导轨的第一位置信息。
39、本申请实施例还公开了一种交叉带分拣机,包括:控制设备;和存储器,其上存储有可执行代码,当所述可执行代码被执行时,使得所述控制设备执行如本申请实施例中任一项所述的方法。
40、本申请实施例还公开了一个或多个机器可读介质,其上存储有可执行代码,当所述可执行代码被执行时,使得控制设备执行如本申请实施例中任一项所述的方法。
41、与现有技术相比,本申请实施例包括以下优点:
42、在本申请实施例中,可基于定位组件的定位信号复位计数器,从而更新主环轨道的一次运行,然后依据测速组件接收的测速信号,更新计数器的计数值,并依据测速组件接收的测速信号,计算主环导轨的运行速度,再依据所述运行速度和计数值确定初始运输设备在主环导轨的第一位置信息,可结合计数器和运行速度确定初始运输设备的位置,并依据第一位置信息确定其他运输设备的第二位置信息,并执行分拣,能够提高速度和定位的准确性,进而提高分拣机的效率。
技术特征:
1.一种交叉带分拣机,其特征在于,所述交叉带分拣机包括:主驱动带式输送机、运输设备和主环轨道;其中:
2.根据权利要求1所述的交叉带分拣机,其特征在于,所述测速组件包括第一测速组件和第二测速组件,所述第一测速组件和第二测速组件水平设置,所述定位组件与第二测速组件竖直设置;
3.根据权利要求1所述的交叉带分拣机,其特征在于,所述定位组件包括定位光电器件,所述测速组件包括测速光电器件。
4.一种交叉带分拣机的处理方法,其特征在于,所述交叉带分拣机的运输设备具有驱动组件,所述运输设备通过所述驱动组件的驱动在主环导轨上移动;其中,所述主环轨道上设置有测速组件和定位组件,所述运输设备的驱动组件上设置有测速孔,在初始运输设备的测速孔下设置有定位孔,所述方法包括:
5.根据权利要求4所述的方法,其特征在于,所述测速组件包括第一测速组件和第二测速组件,所述第一测速组件和第二测速组件水平设置,所述定位组件与第二测速组件竖直设置;
6.根据权利要求5所述的方法,其特征在于,所述基于所述第一时间、第二时间和整车的截距,计算所述主环导轨的运行速度,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于所述第一时间、第二时间和整车的截距,计算所述主环导轨的第一速度,包括:
8.根据权利要求6所述的方法,其特征在于,所述基于所述第一速度、速度偏差参数和距离偏差参数,确定所述主环导轨的运行速度,包括:
9.根据权利要求6所述的方法,其特征在于,依据所述运行速度和计数值确定初始运输设备在主环导轨的第一位置信息,包括:
10.根据权利要求6所述的方法,其特征在于,所述依据所述运行速度对所述移动位置信息进行校正,确定所述初始运输设备在主环导轨的第一位置信息,包括:
技术总结
本申请实施例提供了一种交叉带分拣机及其处理方法和可读介质,以提高处理效率。所述交叉带分拣机的运输设备具有驱动组件,所述运输设备通过所述驱动组件的驱动在主环导轨上移动;其中,所述主环轨道上设置有测速组件和定位组件,所述运输设备的驱动组件上设置有测速孔,在初始运输设备的测速孔下设置有定位孔,所述方法包括:依据定位组件接收的定位信号,确定初始运输设备经过定位组件,并将计数器复位;依据测速组件接收的测速信号,更新计数器的计数值并计算主环导轨的运行速度;依据所述运行速度和计数值确定初始运输设备在主环导轨的第一位置信息;依据第一位置信息确定其他运输设备的第二位置信息,并执行分拣。提高了分拣机的效率。
技术研发人员:汪威,马林
受保护的技术使用者:浙江菜鸟供应链管理有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!