一种高负载高柔性翻转搬运机构的制作方法
本发明涉及装备制造业相关,尤其涉及一种高负载高柔性翻转搬运机构。
背景技术:
1、随着现代工业迅速发展,翻转机构在装备制造业中的使用越来越广泛。一些大型设备制造用板体积大,重量重,由于工艺需求需要实现翻面操作,目前行业内普遍采用人工利用行车进行吊装后实现翻面,耗时耗力,且存在很大的安全隐患。
2、有鉴于上述的缺陷,本设计人积极加以研究创新,以期创设一种高负载高柔性翻转搬运机构,使其更具有产业上的利用价值。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种高负载高柔性翻转搬运机构。
2、为实现上述目的,本发明采用如下技术方案:
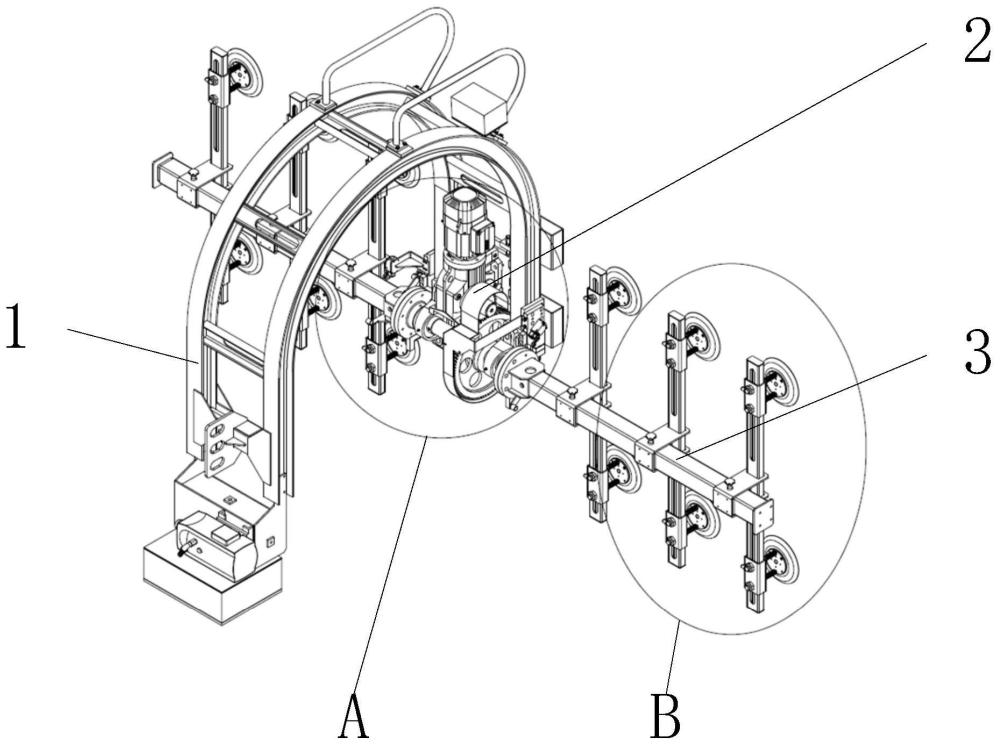
3、一种高负载高柔性翻转搬运机构,包括航吊机架、驱动机构和航吊器具,航吊机架为拱形结构设置,航吊机架沿着x轴正方向或负方向的内侧安装有驱动机构,驱动机构可驱动下方的航吊器具进行翻转操作;
4、驱动机构包括驱动电机,驱动电机通过电机安装板沿着z轴方向安装在航吊机架上,驱动电机底部的电机输出轴与下方的传动齿轮啮合,传动齿轮的内侧与沿着y轴方向设置的转毂相连接,转毂沿着y轴方向的两侧分别与航吊器具相连接。
5、作为本发明的进一步改进,转毂沿着y轴正方向的一侧通过驱动支撑座安装在航吊机架上,转毂沿着y轴正方向的一侧穿过驱动支撑座后通过驱动法兰盘与航吊器具相连接;转毂沿着y轴负方向的一侧通过从动支撑座安装在航吊机架上,转毂沿着y轴负方向的一侧穿过从动支撑座后通过从动法兰盘与航吊器具相连接。
6、作为本发明的进一步改进,靠近驱动法兰盘一侧的航吊机架上设置有第一传感器安装板,第一传感器安装板上安装有第一传感器,靠近驱动法兰盘外侧的航吊器具上安装有与第一传感器相适配的第一感应片;靠近从动法兰盘一侧的航吊机架上设置有第二传感器安装板和第三传感器安装板,第二传感器安装板上安装有第二传感器,第三传感器安装板上安装有第三传感器,靠近从动法兰盘外侧的航吊器具上安装有与第二传感器相适配的第二感应片,靠近从动法兰盘外侧的航吊器具上安装有与第三传感器相适配的第三感应片。
7、作为本发明的进一步改进,第一传感器安装板的底部和沿着x轴负方向的一侧均设置有第一挡块,驱动法兰盘上设置有与第一挡块相适配的第一防撞块;第二传感器安装板的底部和沿着x轴负方向的一侧均设置有第二挡块,从动法兰盘上设置有与第二挡块相适配的第二防撞块。
8、作为本发明的进一步改进,驱动支撑座和从动支撑座上均安装有用于对转毂轴向和径向调节的调节螺栓。
9、作为本发明的进一步改进,航吊器具包括沿着y轴方向设置的航吊器具框架,航吊器具框架上沿着y轴方向均匀的安装有若干个抓取件安装架,抓取件安装架上靠近中部的位置通过c型卡具和卡具螺栓安装在航吊器具框架上,抓取件安装架上均匀的设置有若干个抓取件,抓取件通过抓取件安装框和抓区件安装螺栓安装在抓取件安装架上。
10、作为本发明的进一步改进,抓取件安装架上设置有腰型孔,抓取件通过抓取件安装框和抓区件安装螺栓安装在抓取件安装架上的腰型孔。
11、作为本发明的进一步改进,抓取件为浮动式吸盘。
12、作为本发明的进一步改进,电机安装板的上方沿着y轴方向的两侧均设置有轴向调整固定板,轴向调整固定板上沿着z轴方向安装有轴向调整螺栓,轴向调整螺栓可与下方的电机安装板相连接。
13、作为本发明的进一步改进,电机输出轴的外侧设置有电机输出轴护罩,传动齿轮的外侧设置有传动齿轮护罩。
14、借由上述方案,本发明至少具有以下优点:
15、本发明解决了人工翻转耗时耗力,同时存在安全隐患的问题;
16、本发明通过合理选取回转方式,依靠电机驱动来带动转毂上安装的航吊器具上吸附传输冷链车箱板翻转任意角度转移到下一工位,为下一序工艺实现工件翻面;
17、本发明利用轮齿改变传动比增大扭矩,减慢速度,确保工件翻转过程安全平稳,有效避免了安全事故风险;
18、本发明的抓取件对于不同外形的工件,柔性适应性高,不仅降低了设备成本投入,又提高工作效率。
19、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种高负载高柔性翻转搬运机构,包括航吊机架(1)、驱动机构(2)和航吊器具(3),其特征在于,所述航吊机架(1)为拱形结构设置,所述航吊机架(1)沿着x轴正方向或负方向的内侧安装有驱动机构(2),所述驱动机构(2)可驱动下方的航吊器具(3)进行翻转操作;
2.如权利要求1所述的一种高负载高柔性翻转搬运机构,其特征在于,所述转毂(13)沿着y轴正方向的一侧通过驱动支撑座(17)安装在航吊机架(1)上,所述转毂(13)沿着y轴正方向的一侧穿过驱动支撑座(17)后通过驱动法兰盘(18)与航吊器具(3)相连接;所述转毂(13)沿着y轴负方向的一侧通过从动支撑座(19)安装在航吊机架(1)上,所述转毂(13)沿着y轴负方向的一侧穿过从动支撑座(19)后通过从动法兰盘(20)与航吊器具(3)相连接。
3.如权利要求2所述的一种高负载高柔性翻转搬运机构,其特征在于,靠近所述驱动法兰盘(18)一侧的航吊机架(1)上设置有第一传感器安装板(10),所述第一传感器安装板(10)上安装有第一传感器(11),靠近所述驱动法兰盘(18)外侧的航吊器具(3)上安装有与第一传感器(11)相适配的第一感应片(12);靠近所述从动法兰盘(20)一侧的航吊机架(1)上设置有第二传感器安装板(21)和第三传感器安装板(23),所述第二传感器安装板(21)上安装有第二传感器(22),所述第三传感器安装板(23)上安装有第三传感器(24),靠近所述从动法兰盘(20)外侧的航吊器具(3)上安装有与第二传感器(22)相适配的第二感应片(25),靠近所述从动法兰盘(20)外侧的航吊器具(3)上安装有与第三传感器(24)相适配的第三感应片(26)。
4.如权利要求3所述的一种高负载高柔性翻转搬运机构,其特征在于,所述第一传感器安装板(10)的底部和沿着x轴负方向的一侧均设置有第一挡块,所述驱动法兰盘(18)上设置有与第一挡块相适配的第一防撞块;所述第二传感器安装板(21)的底部和沿着x轴负方向的一侧均设置有第二挡块,所述从动法兰盘(20)上设置有与第二挡块相适配的第二防撞块。
5.如权利要求2所述的一种高负载高柔性翻转搬运机构,其特征在于,所述驱动支撑座(17)和从动支撑座(19)上均安装有用于对转毂(13)轴向和径向调节的调节螺栓(16)。
6.如权利要求1所述的一种高负载高柔性翻转搬运机构,其特征在于,所述航吊器具(3)包括沿着y轴方向设置的航吊器具框架(27),所述航吊器具框架(27)上沿着y轴方向均匀的安装有若干个抓取件安装架(30),所述抓取件安装架(30)上靠近中部的位置通过c型卡具(28)和卡具螺栓(29)安装在航吊器具框架(27)上,所述抓取件安装架(30)上均匀的设置有若干个抓取件(34),所述抓取件(34)通过抓取件安装框(32)和抓区件安装螺栓(33)安装在抓取件安装架(30)上。
7.如权利要求6所述的一种高负载高柔性翻转搬运机构,其特征在于,所述抓取件安装架(30)上设置有腰型孔(31),所述抓取件(34)通过抓取件安装框(32)和抓区件安装螺栓(33)安装在抓取件安装架(30)上的腰型孔(31)。
8.如权利要求6所述的一种高负载高柔性翻转搬运机构,其特征在于,所述抓取件(34)为浮动式吸盘。
9.如权利要求1所述的一种高负载高柔性翻转搬运机构,其特征在于,所述电机安装板(7)的上方沿着y轴方向的两侧均设置有轴向调整固定板(6),所述轴向调整固定板(6)上沿着z轴方向安装有轴向调整螺栓(5),所述轴向调整螺栓(5)可与下方的电机安装板(7)相连接。
10.如权利要求1所述的一种高负载高柔性翻转搬运机构,其特征在于,所述电机输出轴(9)的外侧设置有电机输出轴护罩(8),所述传动齿轮(15)的外侧设置有传动齿轮护罩(14)。
技术总结
本发明涉及一种高负载高柔性翻转搬运机构,包括航吊机架、驱动机构和航吊器具,航吊机架为拱形结构设置,航吊机架沿着X轴正方向或负方向的内侧安装有驱动机构,驱动机构可驱动下方的航吊器具进行翻转操作。本发明解决了人工翻转耗时耗力,同时存在安全隐患的问题;本发明通过合理选取回转方式,依靠电机驱动来带动转毂上安装的航吊器具上吸附传输冷链车箱板翻转任意角度转移到下一工位,为下一序工艺实现工件翻面。
技术研发人员:周顺华,徐潇晨,陆文懿,周青青
受保护的技术使用者:苏州丹景智能科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!