一种电驱动深海绞车主动波浪补偿控制方法与流程
本发明涉及深海绞车的,具体而言,涉及一种电驱动深海绞车主动波浪补偿控制方法。
背景技术:
1、在进行深海作业,如深水载人、深海采矿、深海取样时,作业母船依靠其搭载的万米深海绞车将作业设备牵引并下放至海底固定位置。但受到海面波浪的影响,母船会上下起伏。若深海绞车无主动波浪补偿功能,那么缆绳会拉动作业设备偏离其固定工作位置。为了抵消这种升沉运动造成的影响,深海绞车应具有波浪补偿的功能,能够随着母船的升沉自适应地收放缆绳,维持深海设备工作位置的固定,保障深海设备的正常工作。
2、在这个过程中,万米的缆绳需要一层层整齐紧密地盘绕在绞车的储缆卷筒上。若排缆效果不佳,如发生叠缆或嵌缆,会增加缆绳间的摩擦力,影响缆的使用寿命。缆绳能够紧密整齐地排列,除了与缆绳自身的特性有关外,还跟能否有效准确地控制排缆机构进行排缆动作也有很大的关系。
技术实现思路
1、本发明的目的在于:提供一种能提高波浪补偿装置的稳定性和准确性的控制方法。
2、本发明的技术方案是:提供了一种电驱动深海绞车主动波浪补偿控制方法,该方法包括:
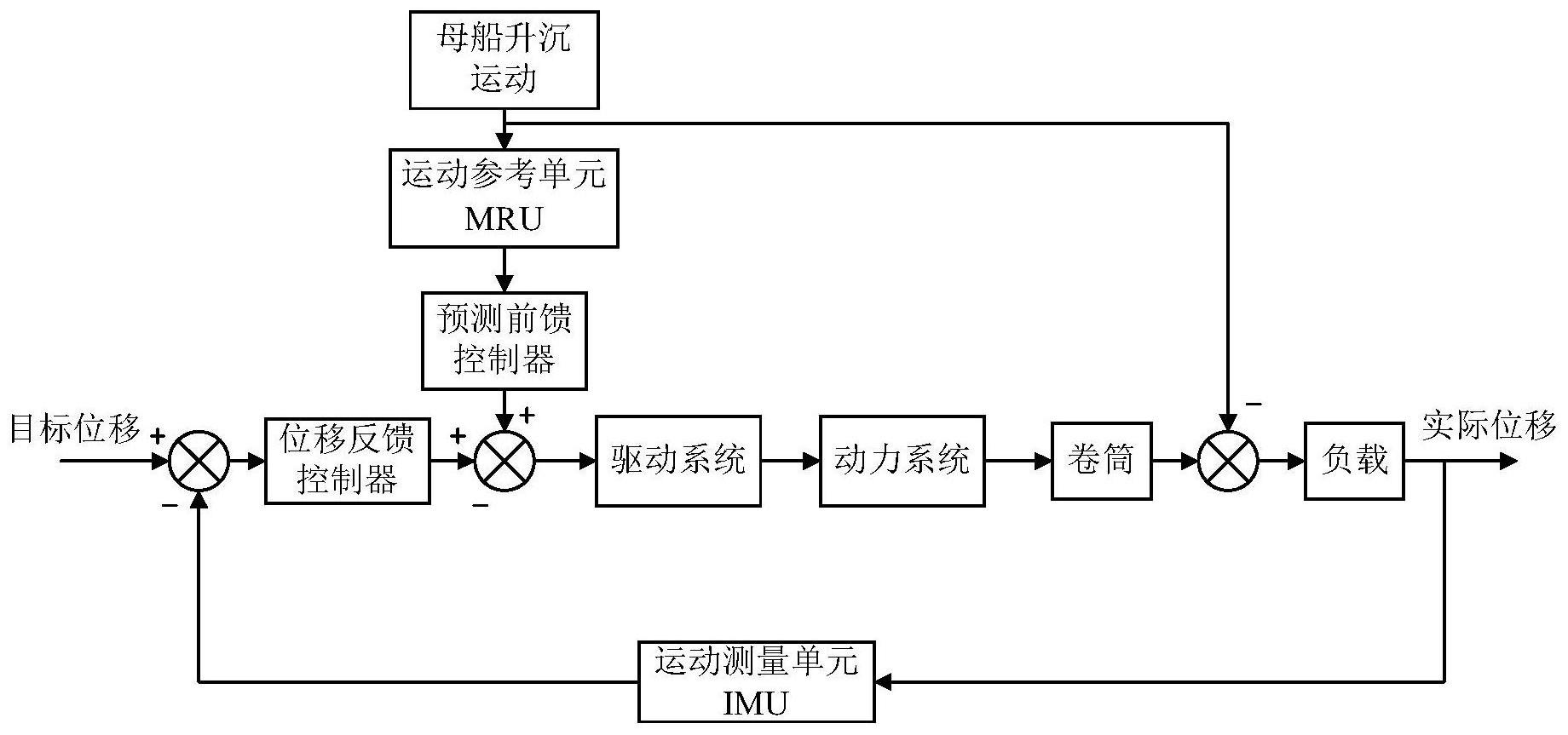
3、s1、通过安装于船体的运动参考单元mru实时测量船体的升沉加速度a1(t),通过安装于负载的惯性测量单元imu实时测量负载的升沉加速度a2(t),对船体的升降加速度a1(t)进行频域积分得到船体的升沉速度v1(t)和升沉位移x1(t),对负载的升降加速度a1(t)进行频域积分得到船体的升沉速度v2(t)和升沉位移x2(t);
4、s2、将船体的升沉位移x1(t)输入预测前馈控制器去噪处理,得到前馈控制信号u1(t),向位移反馈控制器中输入预设理想位移x0,将预设理想位移x0与负载的升沉位移x2(t)求差得到δx输入位移反馈控制器中,得到反馈控制信号u2(t);
5、s3、将前馈控制信号u1(t)和反馈控制信号u2(t)进行结合,得到控制信号u(t)输入驱动系统中以控制排缆,使船体与负载在竖直方向的相对位置保持稳定。
6、上述任一项技术方案中,进一步地,运动参考单元mru和惯性测量单元imu只测量船体与负载在竖直方向的升沉信息。
7、上述任一项技术方案中,进一步地,由于需求负载在深海中深度位置保持不变,预设理想位移x0设定为0。
8、上述任一项技术方案中,进一步地,预测前馈控制器使用卡尔曼滤波,消除船体的升沉位移x1(t)这一函数的噪音,使前馈控制信号u1(t)更加稳定。
9、上述任一项技术方案中,进一步地,步骤s3中控制排缆具体为:驱动系统接收控制信号u(t),计算所需的排缆长度,控制排缆机构的电机收放合适长度的缆绳。
10、上述任一项技术方案中,进一步地,排缆机构包括储缆绞车和排缆器,缆绳缠绕在储缆绞车上,并穿过排缆器,排缆器安装在平行于储缆绞车的转轴的轨道上,轨道使排缆器跟随缠绕缆绳位置移动,防止缆绳与排缆器的角度过大造成事故。
11、上述任一项技术方案中,进一步地,排缆器跟随缠绕缆绳位置移动的方法为:测量储缆绞车出绳点相对于零点的水平位移s1,测量排缆器出绳点相对于零点的水平位移s2,将s1与s2求差得到δs并输入至位移反馈控制器中,位移反馈控制器控制排缆器在轨道上移动。
12、上述任一项技术方案中,进一步地,零点选取排缆器的轨道的一端。
13、本发明的有益效果是:
14、本发明的技术方案采用由位置反馈控制和预测前馈补偿控制相结合的复合控制策略:
15、其中预测前馈控制利用卡尔曼滤波的准确性和敏捷性,保证控制效果的及时性,提高反应速度,解决传统补偿系统响应滞后的问题;
16、而位移反馈控制利用模糊pid的稳定性和强鲁棒性,可以对补偿过程中的偏差进行自适应调节;
17、该控制方法既能满足对参考输入响应的性能要求,又能保证主动波浪补偿的控制精度。
技术特征:
1.一种电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述运动参考单元mru和所述惯性测量单元imu只测量船体与负载在竖直方向的升沉信息。
3.如权利要求1所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,由于需求负载在深海中深度位置保持不变,所述预设理想位移x0设定为0。
4.如权利要求1所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述预测前馈控制器使用卡尔曼滤波,消除船体的升沉位移x1(t)这一函数的噪音,使所述前馈控制信号u1(t)更加稳定。
5.如权利要求1所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述步骤s3中控制排缆具体为:所述驱动系统接收控制信号u(t),计算所需的排缆长度,控制排缆机构的电机收放合适长度的缆绳。
6.如权利要求5所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述排缆机构包括储缆绞车(1)和排缆器(2),缆绳缠绕在所述储缆绞车(1)上,并穿过所述排缆器(2),所述排缆器(2)安装在平行于所述储缆绞车(1)的转轴的轨道上,所述轨道使所述排缆器(2)跟随缠绕缆绳位置移动,防止缆绳与所述排缆器(2)的角度过大造成事故。
7.如权利要求6所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述排缆器(2)跟随缠绕缆绳位置移动的方法为:测量储缆绞车出绳点(3)相对于零点(5)的水平位移s1,测量排缆器出绳点(4)相对于零点(5)的水平位移s2,将s1与s2求差得到δs并输入至所述位移反馈控制器中,所述位移反馈控制器控制所述排缆器(2)在轨道上移动。
8.如权利要求7所述的电驱动深海绞车主动波浪补偿控制方法,其特征在于,所述零点(5)选取所述排缆器(2)的轨道的一端。
技术总结
本发明公开了一种电驱动深海绞车主动波浪补偿控制方法,包括:通过安装于船体的运动参考单元MRU和安装于负载的惯性测量单元IMU实时测量船体和负载的升沉数据并计算出各自的升沉位移,将船体的升沉位移输入预测前馈控制器处理,得到前馈控制信号u<subgt;1</subgt;(t),向位移反馈控制器中输入预设理想位移x<subgt;0</subgt;,将预设理想位移x<subgt;0</subgt;与负载的升沉位移求差得到Δx输入位移反馈控制器中,得到反馈控制信号u<subgt;2</subgt;(t);将前馈控制信号u<subgt;1</subgt;(t)和反馈控制信号u<subgt;2</subgt;(t)进行结合,得到控制信号u(t)输入驱动系统中以控制排缆,使船体与负载在竖直方向的相对位置保持稳定。
技术研发人员:毛立峰,赵艺林,董明曦,何宇华,王晨星
受保护的技术使用者:中国船舶集团有限公司第七〇四研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!