一种空中悬挂起重小车电机用加减速控制方法与流程
本发明涉及电机加减速控制领域,尤其涉及一种用于空中悬挂起重小车电机的加减速控制方法。
背景技术:
1、随着人力成本的上升,以及生产的智能化、精细化程度的提高,传统人力在各个机台间人力搬运已经成为生产效率和生产质量的瓶颈,所以自动物料搬送系统(amhs)被广泛应用,比如说机场的货物运输,自动化工厂的物料运输等,特别是在半导体晶圆厂,之所以晶圆厂会大规模的采用amhs是基于它可以快速准确的将载体搬送到目的地,减少wafer的等待时间,避免wafer受到污染。
2、现有的自动物料搬送系统系统中,空中悬挂起重小车是主要的移栽部件,空中悬挂起重小车在启动、停止、变速时通常采用t型加减速方式,即曲线往上走向是加速,如果从某点开始出现往下走的趋势,那么这段就是减速,但是在实际的应用中发现,这样的加减速方式在加减速时速度转换波动大,从导致空中悬挂起重小车在进行速度转换时或出现抖动、震动的现象,这样就会有损坏晶圆的风险,提高了企业的生产成本以及晶圆的良品率。
技术实现思路
1、本发明目的是为了克服现有技术的不足而提供一种能让空中悬挂起重小车的加减速平稳的实现速度的切换、过度,从而减轻车体的震动、大大增加了良品率,降低了晶圆损坏频率的空中悬挂起重小车电机用的加减速控制方法。
2、为达到上述目的,本发明采用的技术方案是:一种空中悬挂起重小车电机用加减速控制方法,包括如下步骤:
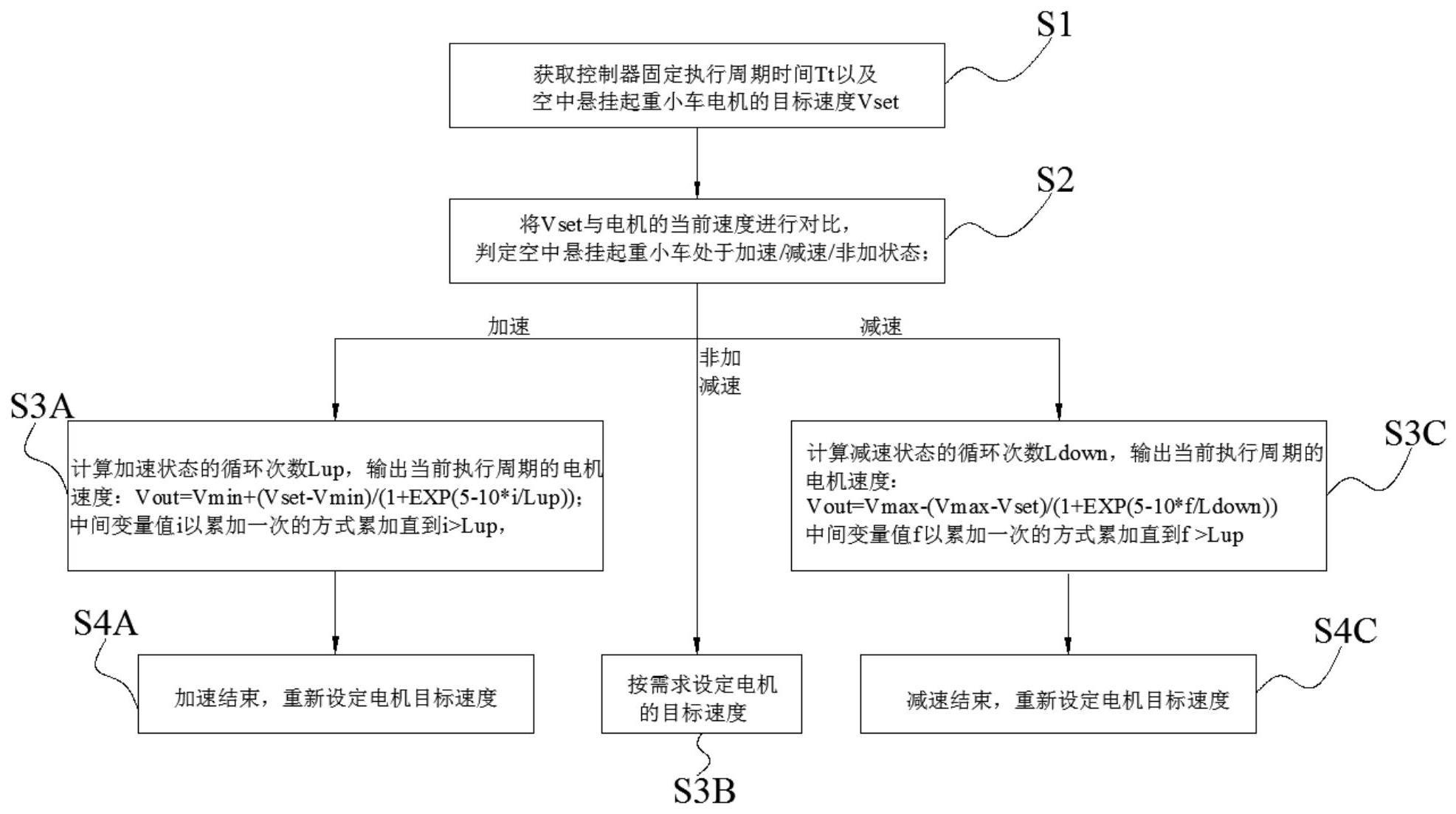
3、获取控制器固定执行周期时间tt以及空中悬挂起重小车电机的目标速度vset;
4、将vset与电机的当前速度进行对比,判定空中悬挂起重小车处于加速/减速/非加状态;
5、当空中悬挂起重小车处于加速时,计算加速状态的循环次数lup,输出当前执行周期的电机速度:vout=vmin+(vset-vmin)/(1+exp(5-10*i/lup));中间变量值i以累加一次的方式累加直到i>lup,则加速状态结束,按需求重新设定电机的目标速度vest;
6、当空中悬挂起重小车处于减速时,计算减速状态的循环次数ldown,输出当前执行周期的电机速度:vout=vmax-(vmax-vset)/(1+exp(5-10*f/ldown)),中间变量值f以累加一次的方式累加直到f>lup,则减速状态结束,按需求重新设定电机的目标速度vest;
7、若vset等于电机的当前速度值,则电机处于非加、减速状态,按需求重新设定电机的目标速度vest。
8、进一步的,控制器固定执行周期时间tt的数值为1ms~5ms。
9、进一步的,加速状态的循环次数计算方式如下:lup=tup/tt*vset/(vmax-vmin);其中,vmax为电机最大速度,vmin为电机最小速度,tup为设定的加速时间。
10、进一步的,减速状态的循环次数计算方式如下:tdown=tdown/tt*vset/(vmax-vmin);其中,vmax为电机最大速度,vmin为电机最小速度,tdown为设定的减速时间。
11、由于上述技术方案的运用,本发明与现有技术相比具有下列优点:
12、本发明的空中悬挂起重小车电机用加减速控制方法的加减速控制方法,通过计算出加减速的循环次数值后,利用中间变量值的重复单个累加一次来实现电机加减速平稳的实现速度的切换和过渡,从而减轻车体的震动、大大增加了晶圆在运输时的良品率,降低了晶圆损坏频率,满足了实际的使用需求,符合晶圆的运输需求。
技术特征:
1.一种空中悬挂起重小车电机用加减速控制方法,其特征在于,包括如下步骤:
2.如权利要求1所述的空中悬挂起重小车电机用加减速控制方法,其特征在于:控制器固定执行周期时间tt的数值为1ms~5ms。
3.如权利要求1所述的空中悬挂起重小车电机用加减速控制方法,其特征在于:加速状态的循环次数计算方式如下:lup=tup/tt*vset/(vmax-vmin);其中,vmax为电机最大速度,vmin为电机最小速度,tup为设定的加速时间。
4.如权利要求1所述的空中悬挂起重小车电机用加减速控制方法,其特征在于:减速状态的循环次数计算方式如下:ldown=tdown/tt*vset/(vmax-vmin);
技术总结
本发明公开了一种空中悬挂起重小车电机用加减速控制方法,包括如下步骤:获取控制器固定执行周期时间Tt和电机的目标速度Vset;将Vset与电机的当前速度值进行比较;若Vset大于电机的当前速度值,电机处于加速状态,计算加速状态的循环次数Lup,输出当前执行周期的电机速度,中间变量值i多次累加一次,直到i>Lup;若Vset小于电机的当前速度值,电机处于减速状态,计算减速状态的循环次数Ldown,输出当前执行周期的电机速度,中间变量值多次累加一次,直到f>Ldown;若Vset等于电机的当前速度值,则电机处于非加、减速状态,本发明通过对加速和减速状态的电机进行中间变量值重复单个累加来实现电机加减速的速度平稳切换和过渡,降低晶圆损坏频率,增加晶圆良品率。
技术研发人员:范恒文,李佳成,金汉坤,赵金强
受保护的技术使用者:成川科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!