一种全自动光纤绕环机及光纤绕环方法与流程
本发明涉及光纤绕制,尤其涉及一种全自动光纤绕环机光纤绕环方法。
背景技术:
1、光纤陀螺是一种敏感角速率的惯性仪表,凭借其自主性高、全固态结构、动态范围宽、启动时间短、抗冲击能力强和抗干扰能力强的特点,广泛应用于惯性导航及制导、姿态控制、定位定向等国防工业领域。
2、光纤环是光纤陀螺的重要组成部分,相较于人工绕制光纤环的方式,光纤绕环机具备效率高、成本低、精确度高以及生产的光纤环性能稳定等优点,以广泛应用于光纤环制造,然而目前的光纤绕环机在缠绕过程中通过绕环夹具旋转,每次只能缠绕一个分纤环的光纤,并且由于2个分纤环分步缠绕,在切换过程中有倒换分纤环的操作,导致光纤环全自动绕制效率低下。
技术实现思路
1、本发明提供了一种全自动光纤绕环机光纤绕环方法,用以解决目前光纤环全自动绕制效率低下的技术问题。
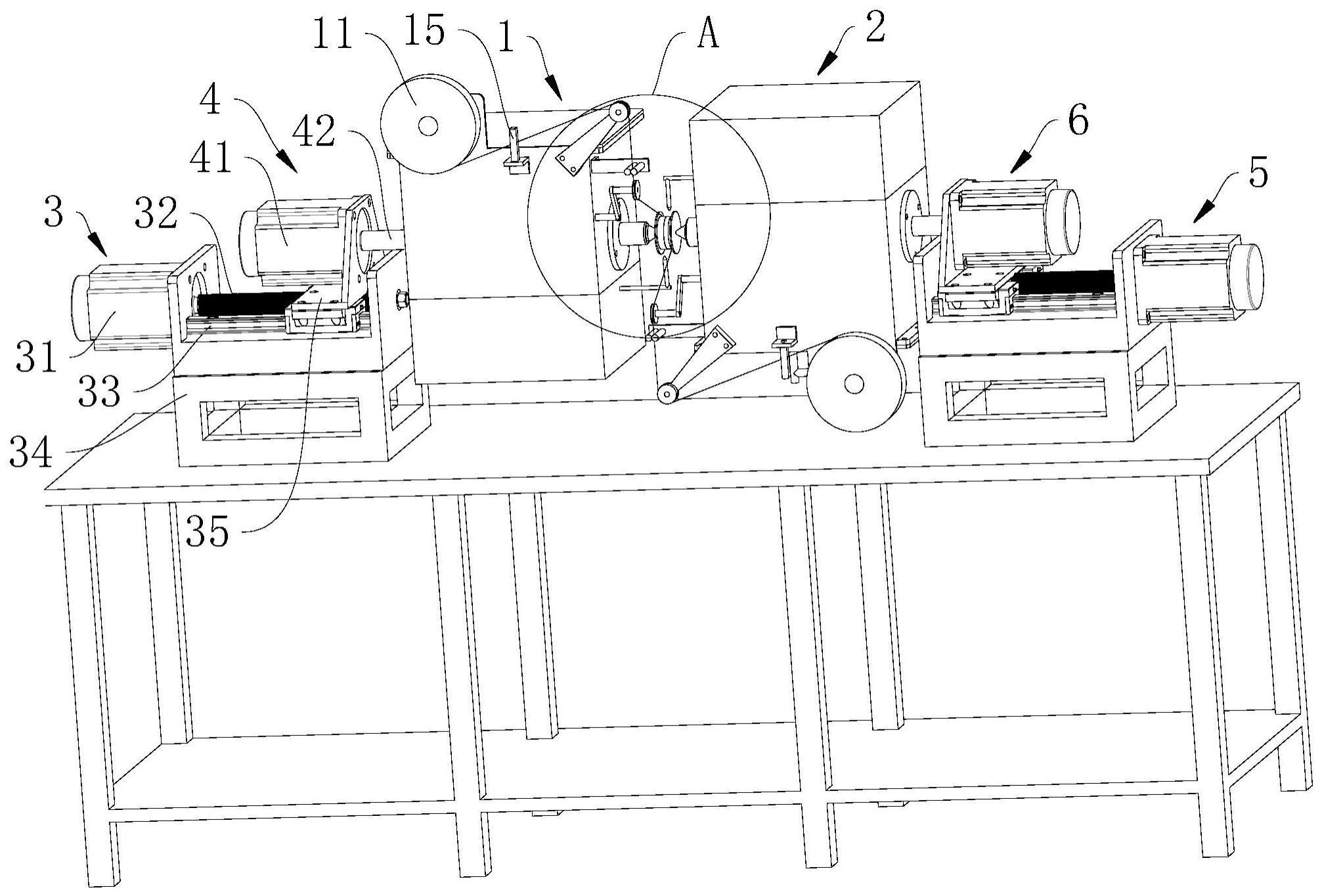
2、为解决上述技术问题,第一方面,本发明提出了一种全自动光纤绕环机,包括:第一光纤缠绕装置、第二光纤缠绕装置、第一驱动装置、第一旋转装置、第二驱动装置和第二旋转装置,所述第一驱动装置连接并驱动所述第一旋转装置线性移动,所述第一旋转装置连接并驱动所述第一光纤缠绕装置正向旋转,所述第二驱动装置连接并驱动所述第二旋转装置线性移动,所述第二旋转装置连接并驱动所述第二光纤缠绕装置反向旋转,所述第一光纤缠绕装置和所述第二光纤缠绕装置均设有用于放纤的分纤环,所述分纤环上的光纤连接到光纤环骨架,所述光纤环骨架固定设置于所述第一旋转装置和所述第二旋转装置的旋转轴心处。
3、进一步地,所述第一光纤缠绕装置和第二光纤缠绕装置的结构相同,还包括箱体、放纤电机和张力轮,所述箱体连接所述第一旋转装置,所述放纤电机安装于所述箱体上,所述放纤电机的转轴连接所述分纤环,所述张力轮安装于所述箱体上,所述分纤环上的光纤经过所述张力轮后连接到所述光纤环骨架。
4、进一步地,所述第一光纤缠绕装置还包括设于所述箱体上的前光纤定向器、光纤计长器和后光纤定向器,所述分纤环上的光纤依次经过所述前光纤定向器、光纤计长器、后光纤定向器和张力轮后连接到所述光纤环骨架。
5、进一步地,所述箱体的端部还设有喷胶机构,所述喷胶机构的喷嘴正对所述光纤环骨架。
6、进一步地,所述第一驱动装置和所述第二驱动装置的结构相同,包括直线电机、丝杆、滑轨、底座和安装座,所述直线电机和所述滑轨固定安装于所述底座上,所述丝杆连接所述直线电机的转轴,所述安装座安装于所述丝杆和所述滑轨上,所述第一旋转装置安装于所述安装座上。
7、进一步地,所述第一旋转装置和所述第二旋转装置的结构相同,包括缠绕电机和传动轴,所述缠绕电机安装于所述第一驱动装置上,所述传动轴连接所述缠绕电机的转轴,所述第一光纤缠绕装置安装于所述传动轴上,所述第一旋转装置的传动轴与所述第二旋转装置的传动轴的轴心相同。
8、进一步地,所述箱体上可伸缩的光纤环骨架握持装置,所述光纤环骨架握持装置,所述光纤环骨架握持装置连接到箱体内部的伸缩装置,所述伸缩装置驱动光纤环骨架握持装置线性移动。
9、第二方面,本发明还提供一种光纤环绕制方法,所述光纤环绕制方法应用于第一方面所述的全自动光纤绕环机,包括以下步骤:
10、s1:将光纤环骨架固定至光纤环骨架握持装置上;
11、s2:使分纤环上的光纤依次经过前光纤定向器、光纤计长器、后光纤定向器和张力轮后连接到光纤环骨架;
12、s3:第一旋转装置驱动第一光纤缠绕装置正向旋转,第二旋转装置驱动第二光纤缠绕装置反向旋转;
13、s4:第一驱动装置根据光纤缠绕进程第一旋转装置和第一光纤缠绕装置做水平运动,第二驱动装置根据光纤缠绕进程第二旋转装置和第二光纤缠绕装置做水平运动,确保光纤精准进入缠绕位置;
14、s5:重复步骤s3和s4,直至光纤环绕制完成。
15、作为本发明的方法的进一步改进:在进行光纤绕制时,当光纤绕制完成且第一光纤缠绕装置和/或第二光纤缠绕装置旋转180°后,喷胶机构向该绕制完成的光纤喷胶。
16、本发明具有以下有益效果:本发明的一种全自动光纤绕环机及光纤绕环方法,将光纤环骨架固定设置于第一旋转装置和第二旋转装置的旋转轴心处,使第一光纤缠绕装和第二光纤缠绕装置的分纤环上的光纤连接到光纤环骨架,通过第一旋转装置驱动第一光纤缠绕装置正向旋转,第二旋转装置驱动第二光纤缠绕装置反向旋转,第一驱动装置根据光纤缠绕进程第一旋转装置和第一光纤缠绕装置做水平运动,第二驱动装置根据光纤缠绕进程第二旋转装置和第二光纤缠绕装置做水平运动,确保光纤精准进入缠绕位置,直至光纤环绕制完成,本发明中光纤环骨架固定不动,光纤缠绕装置带动分纤环运动,将光纤缠绕至光纤环骨架上,2个光纤缠绕装置分时启动,并同步控制,在空间上错位对称运行,提高了光纤对光纤环骨架的力平衡,2个光纤缠绕装置同时将光纤以相反的方向缠绕到光纤环骨架上,提高了光纤环的绕环效率。
17、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照附图,对本发明作进一步详细的说明。
技术特征:
1.一种全自动光纤绕环机,其特征在于,包括:第一光纤缠绕装置(1)、第二光纤缠绕装置(2)、第一驱动装置(3)、第一旋转装置(4)、第二驱动装置(5)和第二旋转装置(6),所述第一驱动装置(3)连接并驱动所述第一旋转装置(4)线性移动,所述第一旋转装置(4)连接并驱动所述第一光纤缠绕装置(1)正向旋转,所述第二驱动装置(5)连接并驱动所述第二旋转装置(6)线性移动,所述第二旋转装置(6)连接并驱动所述第二光纤缠绕装置(2)反向旋转,所述第一光纤缠绕装置(1)和所述第二光纤缠绕装置(2)均设有用于放纤的分纤环(11),所述分纤环(11)上的光纤(7)连接到光纤环骨架(71),所述光纤环骨架(71)固定设置于所述第一旋转装置(4)和所述第二旋转装置(6)的旋转轴心处。
2.根据权利要求1所述的一种全自动光纤绕环机,其特征在于,所述第一光纤缠绕装置(1)和第二光纤缠绕装置(2)的结构相同,还包括箱体(12)、放纤电机(13)和张力轮(14),所述箱体(12)连接所述第一旋转装置(4),所述放纤电机(13)安装于所述箱体(12)上,所述放纤电机(13)的转轴连接所述分纤环(11),所述张力轮(14)安装于所述箱体(12)上,所述分纤环(11)上的光纤(7)经过所述张力轮(14)后连接到所述光纤环骨架(71)。
3.根据权利要求2所述的一种全自动光纤绕环机,其特征在于,所述第一光纤缠绕装置(1)还包括设于所述箱体(12)上的前光纤定向器(15)、光纤计长器(16)和后光纤定向器(17),所述分纤环(11)上的光纤(7)依次经过所述前光纤定向器(15)、光纤计长器(16)、后光纤定向器(17)和张力轮(14)后连接到所述光纤环骨架(71)。
4.根据权利要求2所述的一种全自动光纤绕环机,其特征在于,所述箱体(12)的端部还设有喷胶机构(8),所述喷胶机构(8)的喷嘴(81)正对所述光纤环骨架(71)。
5.根据权利要求1所述的一种全自动光纤绕环机,其特征在于,所述第一驱动装置(3)和所述第二驱动装置(5)的结构相同,包括直线电机(31)、丝杆(32)、滑轨(33)、底座(34)和安装座(35),所述直线电机(31)和所述滑轨(33)固定安装于所述底座(34)上,所述丝杆(32)连接所述直线电机(31)的转轴,所述安装座(35)安装于所述丝杆(32)和所述滑轨(33)上,所述第一旋转装置(4)安装于所述安装座(35)上。
6.根据权利要求1所述的一种全自动光纤绕环机,其特征在于,所述第一旋转装置(4)和所述第二旋转装置(6)的结构相同,包括缠绕电机(41)和传动轴(42),所述缠绕电机(41)安装于所述第一驱动装置(3)上,所述传动轴(42)连接所述缠绕电机(41)的转轴,所述第一光纤缠绕装置(1)安装于所述传动轴(42)上,所述第一旋转装置(4)的传动轴(42)与所述第二旋转装置(6)的传动轴的轴心相同。
7.根据权利要求2所述的一种全自动光纤绕环机,其特征在于,所述箱体(12)上可伸缩的光纤环骨架握持装置(72),所述光纤环骨架握持装置(72),所述光纤环骨架握持装置(72)连接到箱体(12)内部的伸缩装置,所述伸缩装置驱动光纤环骨架握持装置(72)线性移动。
8.一种光纤环绕制方法,其特征在于,所述光纤环绕制方法应用于权利要求1至7任一项所述的全自动光纤绕环机。
9.根据权利要求8所述的一种光纤环绕制方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的交一种光纤环绕制方法,其特征在于,在进行光纤(7)绕制时,当光纤(7)绕制完成且第一光纤缠绕装置(1)和/或第二光纤缠绕装置(2)旋转180°后,喷胶机构(8)向该绕制完成的光纤(7)喷胶。
技术总结
本发明公开了一种全自动光纤绕环机及光纤绕环方法,全自动光纤绕环机将光纤环骨架固定设置于第一旋转装置和第二旋转装置的旋转轴心处,使第一光纤缠绕装置和第二光纤缠绕装置的分纤环上的光纤连接到光纤环骨架,通过第一旋转装置驱动第一光纤缠绕装置正向旋转,第二旋转装置驱动第二光纤缠绕装置反向旋转,第一驱动装置根据光纤缠绕进程第一旋转装置和第一光纤缠绕装置做水平运动,第二驱动装置根据光纤缠绕进程第二旋转装置和第二光纤缠绕装置做水平运动,确保光纤精准进入缠绕位置,直至光纤环绕制完成。本发明中光纤环骨架固定不动,2个光纤缠绕装置同时将光纤以相反的方向缠绕到光纤环骨架上,提高了光纤环的绕制效率。
技术研发人员:李慧鹏,王已熏,宋姣玲,王洋,谭文浩
受保护的技术使用者:株洲菲斯罗克光电科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!