支腿装配方法、工程机械、存储介质及处理器与流程
本申请涉及智能装配,具体涉及一种支腿装配方法、工程机械、存储介质及处理器。
背景技术:
1、起重机一、二级活动支腿在装配前,通常不会进行尺寸检测,或者仅使用固定位置摄像头实现关键尺寸检测。由于测量摄像头固定,其可测量位置及范围有限,不能满足外型、尺寸差异大的工件混线生产。并且固定位置的摄像头易与工装、工件吊运过程发生干涉,并且还会存在拍摄盲区,难以适用于产品型号较多、尺寸差异性大的支腿进行装配作业。
技术实现思路
1、本申请实施例的目的是提供一种支腿装配方法、工程机械、存储介质及处理器。
2、为了实现上述目的,本申请第一方面提供一种支腿装配方法,包括:
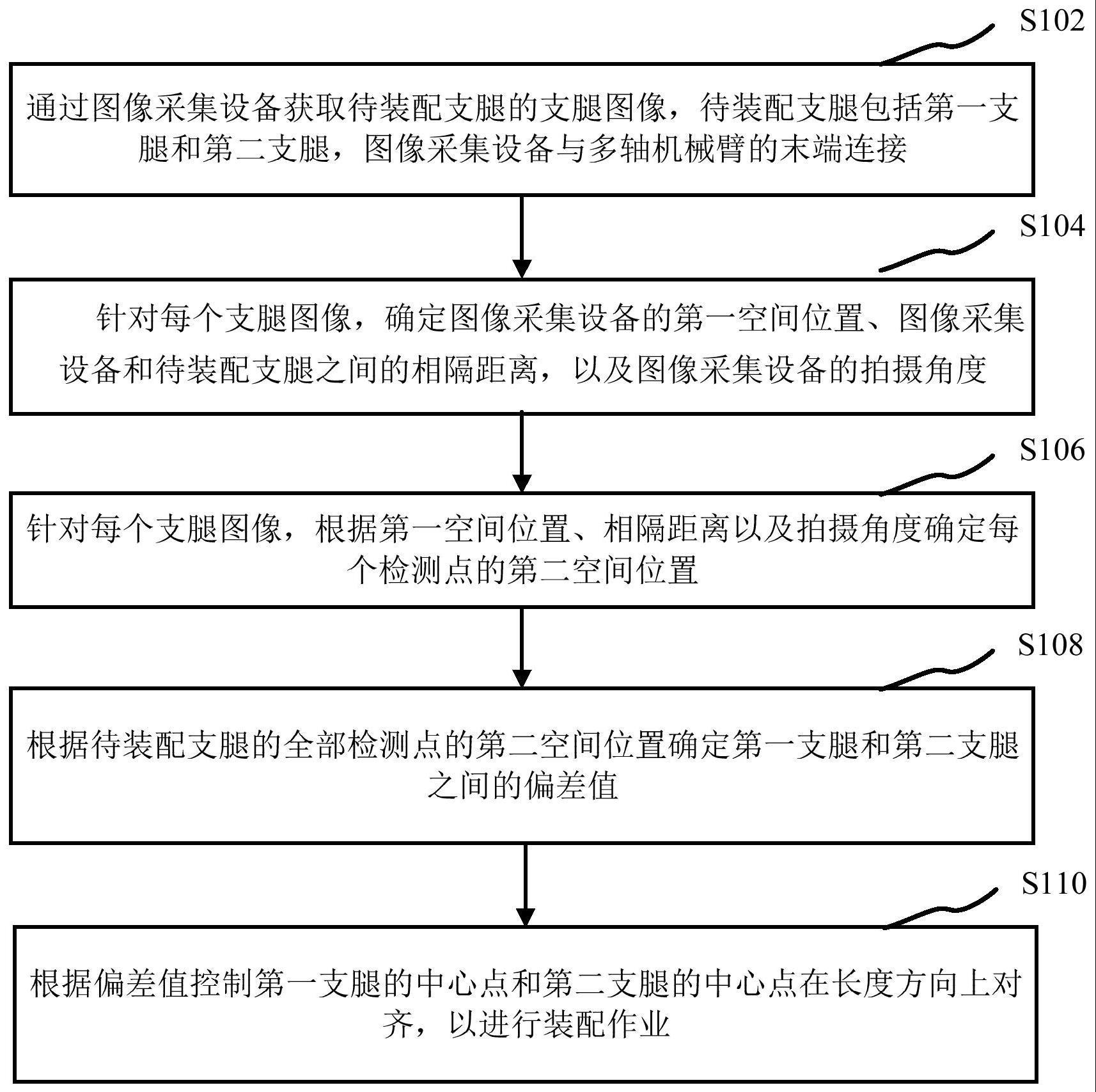
3、通过图像采集设备获取待装配支腿的支腿图像,待装配支腿包括第一支腿和第二支腿,图像采集设备与多轴机械臂的末端连接;
4、针对每个支腿图像,确定图像采集设备的第一空间位置、图像采集设备和待装配支腿之间的相隔距离,以及图像采集设备的拍摄角度;
5、针对每个支腿图像,根据第一空间位置、每个检测点对应的相隔距离以及拍摄角度确定每个检测点的第二空间位置;
6、根据待装配支腿的全部检测点的第二空间位置确定第一支腿和第二支腿之间的偏差值;
7、根据偏差值控制第一支腿的中心点和第二支腿的中心点在长度方向上对齐,以进行装配作业。
8、在本申请的实施例中,根据偏差值控制第一支腿的中心点和第二支腿的中心点在长度方向上对齐,以进行装配作业包括:根据偏差值确定伺服机构的运动偏移量;根据运动偏移量控制伺服机构运动,以控制第二支腿静止,并控制第一支腿的中心点朝第二支腿的中心点移动;在第一支腿的中心点与第二支腿的中心点之间的偏差值小于或等于预设偏差阈值的情况下,确定第一支腿的中心点和第二支腿的中心点在长度方向上对齐。
9、在本申请的实施例中,方法还包括:在通过图像采集设备获取待装配支腿的支腿图像之前,获取待装配支腿的支腿型号;根据支腿型号确定与待装配支腿对应的标定程序;根据标定程序确定图像采集设备的移动轨迹和拍摄角度;控制图像采集设备按照移动轨迹移动,并以拍摄角度采集待装配支腿的支腿图像。
10、在本申请的实施例中,针对每个支腿图像,根据第一空间位置、相隔距离以及确定每个检测点的第二空间位置包括:确定每个支腿图像中每个检测点的图像位置和图像采集设备的设备参数;针对每个支腿图像,根据每个检测点的图像位置和设备参数确定每个检测点的齐次坐标,齐次坐标是指以第一空间位置的原点的相机坐标系下的空间坐标;针对每个支腿图像,根据相隔距离和拍摄角度将每个检测点的齐次坐标转换成第二空间位置。
11、在本申请的实施例中,针对每个支腿图像,根据相隔距离和拍摄角度将每个检测点的齐次坐标转换成第二空间位置包括:针对每个支腿图像,根据相隔距离和拍摄角度确定图像采集设备的平移向量和旋转矩阵;根据平移向量和旋转矩阵将每个检测点的齐次坐标转换成第二空间位置。
12、在本申请的实施例中,设备参数包括图像采集设备的焦距和光心的位置,针对每个支腿图像,根据每个检测点的图像位置和设备参数确定每个检测点的齐次坐标包括:针对每个支腿图像,根据焦距和光心的位置将每个检测点的图像位置转换成每个检测点的齐次坐标,其中,每个检测点的齐次坐标根据以下公式(1)进行计算:
13、
14、其中,fx是指图像采集设备在x方向上的焦距,fy是指图像采集设备的在y方向上的焦距,cx和cy是指图像采集设备的光心的位置,[u v]是指每个支腿图像的每个检测点的图像位置,[xcyczc]是指每个支腿图像的每个检测点的齐次坐标,齐次坐标是指以第一空间位置的原点的相机坐标系下的空间坐标。
15、本申请第二方面提供一种处理器,被配置成执行上述的支腿装配方法。
16、本申请第三方面提供一种工程机械,包括:
17、图像采集设备,与多轴机械臂的末端连接,图像采集设备用于获取待装配支腿的支腿图像;
18、多轴机械臂,用于控制图像采集设备的移动轨迹和拍摄角度;
19、以及被配置成执行上述的支腿装配方法的处理器。
20、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得所述处理器被配置成执行上述的支腿装配方法。
21、通过上述支腿装配方法、工程机械、存储介质及处理器,通过图像采集设备获取待装配支腿的支腿图像,待装配支腿包括第一支腿和第二支腿,图像采集设备与多轴机械臂的末端连接;针对每个支腿图像,确定图像采集设备的第一空间位置、图像采集设备和待装配支腿之间的相隔距离,以及图像采集设备的拍摄角度;针对每个支腿图像,根据第一空间位置相隔距离以及拍摄角度确定每个检测点的第二空间位置;根据待装配支腿的全部检测点的第二空间位置确定第一支腿和第二支腿之间的偏差值;根据偏差值控制第一支腿的中心点和第二支腿的中心点在长度方向上对齐,以进行装配作业。图像采集设备可以灵活采集多个方向上的支腿图像,对待装配支腿进行标定,以对准确进行装配作业。在拍摄过程中减少与工装夹具的干涉,对于支腿的某些边角区域和内腔均可以实现测量,可以适用不同型号的支腿,并提高装配精确度。
22、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种支腿装配方法,其特征在于,所述方法包括:
2.根据权利要求1所述的支腿装配方法,其特征在于,所述根据所述偏差值控制第一支腿的中心点和第二支腿的中心点在长度方向上对齐,以进行装配作业包括:
3.根据权利要求1所述的支腿装配方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的支腿装配方法,其特征在于,所述针对每个支腿图像,根据所述第一空间位置、所述相隔距离以及确定每个检测点的第二空间位置包括:
5.根据权利要求4所述的支腿装配方法,其特征在于,所述针对每个支腿图像,根据所述相隔距离和所述拍摄角度将每个检测点的齐次坐标转换成所述第二空间位置包括:
6.根据权利要求4所述的支腿装配方法,其特征在于,所述设备参数包括所述图像采集设备的焦距和光心的位置,针对每个支腿图像,根据每个检测点的图像位置和所述设备参数确定每个检测点的齐次坐标包括:
7.一种处理器,其特征在于,被配置成执行根据权利要求1至6中任意一项所述的支腿装配方法。
8.一种工程机械,其特征在于,包括:
9.根据权利要求8所述的工程机械,其特征在于,还包括:
10.一种机器可读存储介质,该机器可读存储介质上存储有指令,其特征在于,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至6中任一项所述的支腿装配方法。
技术总结
本申请实施例提供一种支腿装配方法、工程机械、处理器及存储介质。方法包括:通过图像采集设备获取待装配支腿的支腿图像,图像采集设备与多轴机械臂的末端连接;针对每个支腿图像,确定图像采集设备的第一空间位置、图像采集设备和待装配支腿之间的相隔距离,以及图像采集设备的拍摄角度;针对每个支腿图像,根据第一空间位置、相隔距离以及拍摄角度确定每个检测点的第二空间位置;根据待装配支腿的全部检测点的第二空间位置确定第一支腿和第二支腿之间的偏差值;根据偏差值控制第一支腿的中心点和第二支腿的中心点在长度方向上对齐,以进行装配作业。图像采集设备可以灵活采集多个方向上的支腿图像,对支腿进行标定,以对准确进行装配作业。
技术研发人员:杨赛强,周艾飞,李韬,于国海,李祥
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!