一种大负载全自动多功能输送台车的制作方法
1.本实用新型涉及石油工具维保技术领域,更具体地说涉及一种大负载全自动多功能输送台车。
背景技术:
2.由于法兰尺寸大、规格多、自身重量大的特点,现场使用环境恶劣,为了对后期重复使用所以对其进行维护保养,原始保养靠人工操作加行车辅助进行吊装,操作有诸多不便、且有安全隐患。多人协同作业,十分不便。故此研发此设备进行辅助作业。
技术实现要素:
3.本实用新型克服了现有技术中的不足,提供了一种大负载全自动多功能输送台车,该输送台车结构牢靠、便于操作维护、整体工作时间优化减少、减少维保作业风险和劳动强度。
4.本实用新型的目的通过下述技术方案予以实现。
5.一种大负载全自动多功能输送台车,包括轨道式高精度行走定位车、大负载水平旋转结构、多型号规格法兰夹持装置和多型号规格识别区分装置,
6.所述轨道式高精度行走定位车包括定位车本体、主动轴、从动轴、直行伺服电机和直行齿轮驱动,所述主动轴和所述从动轴通过车轴轴承平行设置在所述定位车本体的下表面上,且在所述定位车本体的下表面还设置有直行伺服电机,所述直行伺服电机通过所述直行齿轮驱动与所述主动轴相连,用于驱动主动轴转动,在所述主动轴的首尾两端分别设置有主动轨道轮,在一个所述主动轨道轮的外侧还设置有齿轮,在所述从动轴的首尾两端分别设置有从动轨道轮,在所述定位车本体的中心处开设有贯穿所述定位车本体的旋转结构安装孔;
7.所述大负载水平旋转结构包括旋转盘、万向球支撑、外齿回转轴承、旋转减速电机和旋转齿轮驱动,所述旋转盘通过所述旋转结构安装孔安装在所述定位车本体的上表面,在所述旋转盘的下表面和所述定位车本体的上表面之间均匀设置所述万向球支撑,用于支撑旋转盘,所述旋转减速电机设置在所述定位车本体的下表面上,且所述旋转减速电机的输出轴与设置在所述定位车本体的上表面上的所述旋转齿轮驱动相连,通过旋转减速电机带动旋转齿轮驱动转动,进而带动旋转盘发生转动,所述外齿回转轴承设置在所述旋转齿轮驱动的外侧;
8.所述多型号规格法兰夹持装置包括第一夹持支架、第二夹持支架、法兰支撑块和夹持组件,所述第一夹持架和所述第二夹持架相对设置在所述旋转盘的上表面上,所述法兰支撑块设置在所述旋转盘的上表面上,且位于所述第一夹持架和所述第二夹持架连线的中点处,用于支撑法兰,在所述第一夹持架和所述第二夹持架的顶端均设置所述夹持组件,所述夹持组件包括夹紧块、气动夹紧和导向杆,所述导向杆设置在所述气动夹紧的一侧,所述气动夹紧的导杆尾端和所述导向杆的尾端均与所述夹紧块的一侧相连;
9.所述多型号规格识别区分装置用于识别法兰放置的位置、多型号规格法兰夹持装置是否将法兰夹紧、轨道式高精度行走定位车的行进与返回以及大负载水平旋转结构的旋转与复位。
10.在所述定位车本体的下表面上还设置有平移定位销气缸,所述平移定位销气缸的导杆与平移定位销的上表面相连,所述平移定位销的下部与设置在行进轨道间的销座相配合,以实现利用平移定位销和销座限定定位车本体在行进轨道上的位置的目的。
11.在所述平移定位销气缸的一侧还设置有直行到位检测开关,用于检测销座的位置。
12.在所述旋转盘的下表面上还设置有旋转定位销气缸,所述旋转定位销气缸的导杆与旋转定位销的上表面相连,在旋转定位销气缸内侧的所述定位车本体的上表面上还设置有旋转限位。
13.在与旋转定位销气缸相对一侧的所述旋转盘的下表面上还设置有旋转到位检测开关。
14.在所述气动夹紧的另一侧设置有夹紧检测开关,用于检测夹紧块是否将法兰夹紧。
15.在所述法兰支撑块上均匀设置有法兰检测开关,用于检测法兰是否放置到法兰支撑块上。
16.所述多型号规格识别区分装置由直行到位检测开关、旋转到位检测开关、夹紧检测开关和法兰检测开关组成,利用直行到位检测开关实现自动控制轨道式高精度行走定位车的行进与返回,利用旋转到位检测开关实现自动控制大负载水平旋转结构的旋转与复位,利用夹紧检测开关实现检测多型号规格法兰夹持装置是否将法兰夹紧,利用法兰检测开关实现检测识别法兰放置的位置。
17.所述输送台车还包括行进轨道,在所述行进轨道上设置有齿条,所述齿轮与所述齿条相啮合,在所述齿条和所述齿轮的外侧还设置有保护罩。
18.本实用新型的有益效果为:大负载全自动多功能输送台车结构牢靠、便于操作维护、整体工作时间优化减少、减少维保作业风险和劳动强度;由于法兰产品种类多达15种,且单个法兰重量大,搬运输送很不方便且存在一定的安全隐患,该输送台车能够覆盖法兰厚度从110-180mm之间的所有法兰的自动输送。
附图说明
19.图1是本实用新型中轨道式高精度行走定位车和大负载水平旋转结构的仰视结构示意图;
20.图2是本实用新型中轨道式高精度行走定位车和大负载水平旋转结构的俯视结构示意图;
21.图3是本实用新型中轨道式高精度行走定位车和大负载水平旋转结构的正视结构示意图;
22.图4是本实用新型中轨道式高精度行走定位车和大负载水平旋转结构的右视结构示意图;
23.图5是本实用新型中轨道式高精度行走定位车和大负载水平旋转结构的结构示意
图,其中,a为正常放置时的立体图,b为倒立放置时的立体图;
24.图6是本实用新型中高精度行走定位车的结构示意图;
25.图7是本实用新型的主视结构示意图;
26.图8是本实用新型的左视结构示意图;
27.图9是本实用新型的俯视结构示意图;
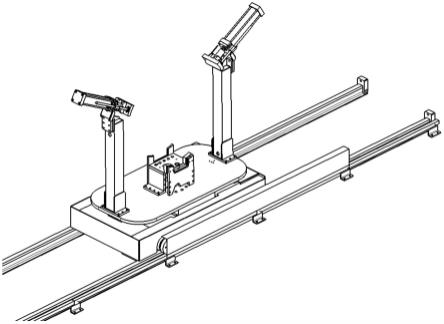
28.图10是本实用新型的立体结构示意图;
29.图中:1为定位车本体,2为主动轴,3为主动轨道轮,4为齿轮,5为直行伺服电机,6为直行齿轮驱动,7为从动轴,8为从动轨道轮,9为平移定位销,10为销座,11为旋转结构安装孔,12为旋转减速电机,13为旋转齿轮驱动,14为旋转盘,15为万向球支撑,16为外齿回转轴承,17为旋转限位,18为旋转定位销,19为旋转到位检测开关,20为车轴轴承,21为平移定位销气缸,22为旋转定位销气缸,23为直行到位检测开关,24为法兰检测开关,25为第一夹持支架,26为第二夹持支架,27为夹紧块,28为夹紧检测开关,29为气动夹紧,30为导向杆,31为齿条,32为行进轨道,33为保护罩,34为法兰支撑块。
30.对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据以上附图获得其他的相关附图。
具体实施方式
31.下面通过具体的实施例对本实用新型的技术方案作进一步的说明。
32.一种大负载全自动多功能输送台车,包括轨道式高精度行走定位车、大负载水平旋转结构、多型号规格法兰夹持装置和多型号规格识别区分装置,
33.轨道式高精度行走定位车包括定位车本体1、主动轴2、从动轴7、直行伺服电机8和直行齿轮驱动6,主动轴2和从动轴7通过车轴轴承20平行设置在定位车本体1的下表面上,且在定位车本体1的下表面还设置有直行伺服电机8,直行伺服电机8通过直行齿轮驱动6与主动轴2相连,用于驱动主动轴2转动,在主动轴2的首尾两端分别设置有主动轨道轮2,在一个主动轨道轮2的外侧还设置有齿轮4,在从动轴7的首尾两端分别设置有从动轨道轮8,在定位车本体1的中心处开设有贯穿定位车本体1的旋转结构安装孔11;
34.大负载水平旋转结构包括旋转盘14、万向球支撑15、外齿回转轴承16、旋转减速电机12和旋转齿轮驱动13,旋转盘14通过旋转结构安装孔11安装在定位车本体1的上表面,在旋转盘14的下表面和定位车本体1的上表面之间均匀设置万向球支撑15,用于支撑旋转盘14,旋转减速电机12设置在定位车本体1的下表面上,且旋转减速电机12的输出轴与设置在定位车本体1的上表面上的旋转齿轮驱动13相连,通过旋转减速电机12带动旋转齿轮驱动13转动,进而带动旋转盘14发生转动,外齿回转轴承16设置在旋转齿轮驱动13的外侧;
35.多型号规格法兰夹持装置包括第一夹持支架25、第二夹持支架26、法兰支撑块34和夹持组件,第一夹持架25和第二夹持架26相对设置在旋转盘14的上表面上,法兰支撑块34设置在旋转盘14的上表面上,且位于第一夹持架25和第二夹持架26连线的中点处,用于支撑法兰,在第一夹持架25和第二夹持架26的顶端均设置夹持组件,夹持组件包括夹紧块27、气动夹紧29和导向杆30,导向杆30设置在气动夹紧29的一侧,气动夹紧29的导杆尾端和导向杆30的尾端均与夹紧块27的一侧相连;
36.多型号规格识别区分装置用于识别法兰放置的位置、多型号规格法兰夹持装置是
否将法兰夹紧、轨道式高精度行走定位车的行进与返回以及大负载水平旋转结构的旋转与复位。
37.在定位车本体1的下表面上还设置有平移定位销气缸21,平移定位销气缸21的导杆与平移定位销9的上表面相连,平移定位销9的下部与设置在行进轨道32间的销座10相配合,以实现利用平移定位销9和销座10限定定位车本体1在行进轨道31上的位置的目的。
38.在平移定位销气缸21的一侧还设置有直行到位检测开关23,用于检测销座10的位置。
39.在旋转盘14的下表面上还设置有旋转定位销气缸22,旋转定位销气缸22的导杆与旋转定位销18的上表面相连,在旋转定位销气缸22内侧的定位车本体1的上表面上还设置有旋转限位17。
40.在与旋转定位销气缸22相对一侧的旋转盘14的下表面上还设置有旋转到位检测开关19。
41.在气动夹紧29的另一侧设置有夹紧检测开关28,用于检测夹紧块27是否将法兰夹紧。
42.在法兰支撑块34上均匀设置有法兰检测开关24,用于检测法兰是否放置到法兰支撑块34上。
43.多型号规格识别区分装置由直行到位检测开关23、旋转到位检测开关19、夹紧检测开关28和法兰检测开关24组成,利用直行到位检测开关23实现自动控制轨道式高精度行走定位车的行进与返回,利用旋转到位检测开关19实现自动控制大负载水平旋转结构的旋转与复位,利用夹紧检测开关28实现检测多型号规格法兰夹持装置是否将法兰夹紧,利用法兰检测开关24实现检测识别法兰放置的位置。
44.输送台车还包括行进轨道32,在行进轨道32上设置有齿条31,齿轮4与齿条31相啮合,在齿条31和齿轮4的外侧还设置有保护罩33。
45.使用时,当生产所需法兰放置到全自动多功能输送台车的法兰支撑块上时,通过法兰检测开关判断放置无误后,多型号规格识别区分装置发出行进指令,通过轨道式高精度行走定位车将法兰输送至指定位置后,机器人开始工作完成a面工作后,多型号规格识别区分装置发出旋转指令,大负载水平旋转结构开始自动水平旋转180度,机器人继续b面工作完成后,多型号规格识别区分装置发出返回指令,轨道式高精度行走定位车返回初始位置,等待下一个法兰产品。
46.为了易于说明,实施例中使用了诸如“上”、“下”、“左”、“右”等空间相对术语,用于说明图中示出的一个元件或特征相对于另一个元件或特征的关系。应该理解的是,除了图中示出的方位之外,空间术语意在于包括装置在使用或操作中的不同方位。例如,如果图中的装置被倒置,被叙述为位于其他元件或特征“下”的元件将定位在其他元件或特征“上”。因此,示例性术语“下”可以包含上和下方位两者。装置可以以其他方式定位(旋转90度或位于其他方位),这里所用的空间相对说明可相应地解释。
47.而且,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个与另一个具有相同名称的部件区分开来,而不一定要求或者暗示这些部件之间存在任何这种实际的关系或者顺序。
48.以上对本实用新型进行了详细说明,但所述内容仅为本实用新型的较佳实施例,
不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1