一种新型机器人放过滤网装置的制作方法
1.本实用新型涉及铝合金轮毂制造领域,具体涉及一种新型机器人放过滤网装置。
背景技术:
2.随着铝合金轮毂制造自动化程度不断提高,当前轮毂铸造过程中的放网工作大部分由放网机完成。根据轮毂制造工艺,过滤网形式主要有圆柱纤维网和金属网两大类。放网机定位精度低,在放网过程存在放网偏问题,无法严格控制轮毂质量。更换轮毂型号时,需要人工调整设备,更换取网装置,影响生产效率。因此,解决上述问题的方法是研究出一种能够替代放网机设备成为该领域需要解决的问题。
技术实现要素:
3.本实用新型的目的就是针对现有低压机放网机效率低而且无法严格控制轮毂质量问题,提供一种新型机器人放过滤网装置。
4.为实现上述目的,本实用新型采用以下技术方案来实现:
5.该新型机器人放过滤网装置包括机器人取料机构、过滤网自动上料机构及过滤网检测机构;所述机器人取料机构安装在低压机立柱上,所述过滤网自动上料机构安装在低压机平台上,所述过滤网检测机构安装在低压机边模上;
6.上述中,所述机器人取料机构,包括机器人底座,所述的机器人底座安装在低压机立柱上,在所述的机器人底座上安装机器人本体,在机器人本体末端安装放网支架,在所述的放网支架安装三爪气缸,在所述的三爪气缸安装夹爪,所述的夹爪用于抓取和放置圆柱纤维网,在所述的三爪气缸安装磁铁座,在所述的磁铁座安装定位套,在所述的三爪气缸安装磁铁导杆,在所述的磁铁导杆末端安装永磁铁,所述的永磁铁用于抓取和放置金属网;
7.上述中,所述过滤网自动上料机构,包括上料底座,所述的上料底座安装在低压机平台上,在所述的上料底座上安装气动分度盘,气动分度盘每次转动固定角度,在所述的气动分度盘安装定位转盘,在所述的上料底座安装有料检测支架,在所述有料检测支架安装有料检测光电;
8.上述中,所述过滤网检测机构,包括取料检测支架,所述取料检测支架安装在低压机边模上,在所述的取料检测支架安装取料检测光电,所述的取料检测光电用于判断是否成功抓取过滤网。
9.本实用新型的有益效果是:通过专门设计的机器人放过滤网装置,人工只需把过滤网放入过滤网自动上料机构上,然后通过机器人取料机构,将过滤网放入指定位置,而且在不更换工装的前提下,满足圆柱纤维网和金属网两种规格过滤网。通过机器人放过滤网装置,提高轮毂质量,极大的提高生产效率。
附图说明
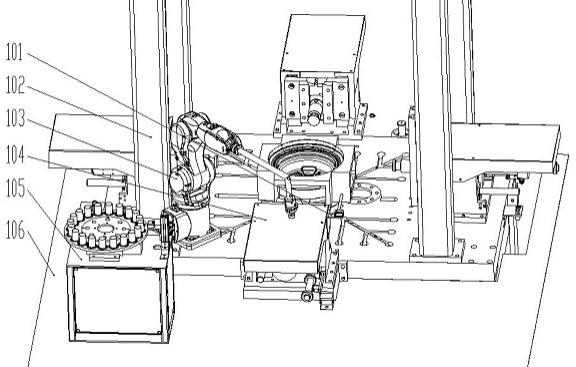
10.图1是机器人放过滤网装置总体示意图。
11.图2是机器人放过滤网装置机器人取料机构主视图。
12.图3是机器人放过滤网装置机器人取料机构剖视图。
13.图4是机器人放过滤网装置过滤网自动上料机构主视图。
14.图5是机器人放过滤网装置过滤网检测机构主视图。
15.图中,101-过滤网检测机构、102-低压机立柱、103-机器人取料机构、104-低压机边模、105-过滤网自动上料机构、106-低压机平台、201-三爪气缸、202放网支架、203机器人本体、204机器人底座、205磁铁导杆、206磁铁座、207夹爪、208定位套、209永磁铁、301有料检测支架、302有料检测光电、303定位转盘、304气动分度盘、305上料底座、401取料检测支架、402取料检测光电。
具体实施方式
16.下面结合附图和具体实施例对本实用新型做进一步的描述。
17.如附图1至图5所示,本实用新型机器人放过滤网装置结构包括机器人取料机构103、过滤网自动上料机构105及过滤网检测机构101。机器人取料机构103安装在低压机立柱102上,过滤网自动上料机构105安装在低压机平台106上,过滤网检测机构102安装在低压机边模104上。
18.机器人底座204安装在低压机立柱102上,在机器人底座204上安装机器人本体203,在机器人本体203末端安装放网支架202,在放网支架202安装三爪气缸201,在三爪气缸201安装夹爪207,所述的夹爪207用于抓取和放置圆柱纤维网,在三爪气缸201安装磁铁座206,在磁铁座206安装定位套208,在三爪气缸201安装磁铁导杆205,在磁铁导杆205末端安装永磁铁209,所述的永磁铁209用于抓取和放置金属网。
19.上料底座305安装在低压机平台106上,在上料底座305上安装气动分度盘304,气动分度盘304每次转动固定角度,在气动分度盘304安装定位转盘303,上料底座305安装有料检测支架301,在所述有料检测支架301安装有料检测光电302。
20.取料检测支架402安装在低压机边模104上,在所述的取料检测支架402安装取料检测光电401,所述的取料检测光电401用于判断是否成功抓取过滤网。
21.工作原理:
22.本实用新型中,物料为圆柱纤维网或金属网,人工将过滤网放到定位转盘303上,当有料检测光电302没有检测到过滤网时,气动分度盘304旋转固定角度,直到有料检测光电302检测到过滤网,气动分度盘304停止旋转。机器人本体203收到信号,到达预先设点位置进行取网,当过滤网为圆柱纤维网时,通过夹爪207进行抓取,当过滤网为金属网时,通过永磁铁209进行抓取,机器人本体203取网完成,到达预先设点位置进行取网判断,当取料检测光电401没有检测到过滤网时,机器人本体203回到预先设点位置进行重新取网,直到取料检测光电401检测到过滤网为止。当取料检测光电401检测到过滤网,机器人本体203到达预先设点位置等待放网,当机器人本体203收到允许放网信号时,机器人本体203到达预先设点位置进行放网,放网完成后,机器人本体203再次进行取网,等待下一次放网。
技术特征:
1.一种新型机器人放过滤网装置,其特征在于:包括机器人取料机构(103)、过滤网自动上料机构(105)及过滤网检测机构(101),机器人取料机构(103)安装在低压机立柱(102)上,过滤网自动上料机构(105)安装在低压机平台(106)上,过滤网检测机构(101)安装在低压机边模(104)上。2.根据权利要求1所述的一种新型机器人放过滤网装置,其特征在于:所述的机器人取料机构(103),包括机器人底座(204),所述的机器人底座(204)安装在低压机立柱(102)上,在所述的机器人底座(204)上安装机器人本体(203),在机器人本体(203)末端安装放网支架(202),在所述的放网支架(202)安装三爪气缸(201),在所述的三爪气缸(201)安装夹爪(207),所述的夹爪(207)用于抓取和放置圆柱纤维网,在所述的三爪气缸(201)安装磁铁座(206),在所述的磁铁座(206)安装定位套(208),在所述的三爪气缸(201)安装磁铁导杆(205),在所述的磁铁导杆(205)末端安装永磁铁(209),所述的永磁铁(209)用于抓取和放置金属网。3.根据权利要求1所述的一种新型机器人放过滤网装置,其特征在于:所述过滤网自动上料机构(105),包括上料底座(305),所述的上料底座(305)安装在低压机平台(106)上,在所述的上料底座(305)上安装气动分度盘(304),气动分度盘(304)每次转动固定角度,在所述的气动分度盘(304)安装定位转盘(303),在所述的上料底座(305)安装有料检测支架(301),在所述有料检测支架(301)安装有料检测光电(302)。4.根据权利要求1所述的一种新型机器人放过滤网装置,其特征在于:所述过滤网检测机构(101),包括取料检测支架(401),所述取料检测支架(401)安装在低压机边模(104)上,在所述的取料检测支架(401)安装取料检测光电(402),所述的取料检测光电(402)用于判断是否成功抓取过滤网。
技术总结
通过专门设计的机器人放过滤网装置,人工只需把过滤网放入过滤网自动上料机构上,然后通过机器人取料机构,将过滤网放入指定位置,而且在不更换工装的前提下,满足圆柱纤维网和金属网两种规格过滤网。通过机器人放过滤网装置,提高轮毂质量,极大的提高生产效率。极大的提高生产效率。极大的提高生产效率。
技术研发人员:孙跃 胡忠臣 宋涛
受保护的技术使用者:秦皇岛中秦智能装备有限公司
技术研发日:2022.07.06
技术公布日:2022/12/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1