一种适用于汽车搬运机器人的轮胎夹持装置的制作方法
本技术涉及自动化机械设备领域,具体涉及汽车搬运部件设计。
背景技术:
1、随着机械自动设备的智能化普及,越来越多的传统工序从人工操作变为机械化操作。其中,汽车作为大型部件,在生产、加工、物流、维修、智能停车过程中需要进行搬运移动,往往采用自动化搬运设备,如搬运机器人进行操作。
2、为了在搬运过程中对车身做到零损伤零变形,往往搬运机器人与汽车的接触点为汽车轮胎,此时就需要使用到轮胎夹持臂或轮胎支撑臂等部件。
3、如公开号为cn113605766a的中国专利文件公开了一种搬运机器人,其在限位叉臂上安装了货叉,货叉侧向靠近车体,一前一后夹持轮胎,从而达到对车辆接触,移动车辆的技术效果。
4、然而,该种技术方案存在一定的缺陷,首先,货叉靠近车辆的方式是侧向靠近,在这个过程中,若是定位不够精准,货叉的前端容易戳伤轮胎。其次,两个货叉之间的间距往往是固定的,当面对不同尺寸的轮胎时会存在通用性不足的问题。第三,为了能更好地夹持轮胎,货叉必须具备一定的长度,这就使得整个轮胎夹持装置的整体尺寸非常庞大,轮胎夹持装置自身的移动、仓储都较为不便。
技术实现思路
1、本实用新型的目的是提供一种适用于汽车搬运机器人的轮胎夹持装置,对轮胎的夹持采用旋转夹持的方式,适用于不同尺寸的轮胎,增加通用性,夹持过程中对轮胎不容易产生损失,收纳状态夹持臂收拢,空间利用率高。
2、一种适用于汽车搬运机器人的轮胎夹持装置,包含车架和用于夹持轮胎的夹持套件,其特征在于:所述车架包含主框和安装在所述主框宽度方向两侧的导向板,所述导向板上开设有导向槽;
3、所述夹持套件为两套,安装在所述车架宽度方向两侧,每套所述夹持套件包含两个滑动臂和驱动两个所述滑动臂彼此靠近或远离的平移驱动装置,每个滑动臂上均转动连接有一个夹持臂,所述夹持臂上安装有伸入所述导向槽的导向套,所述导向槽包含直线段和位于所述直线段两端且向所述车架长度方向中轴线靠近的上扬段。
4、作为本实用新型的优选,所述平移驱动装置包含安装在所述主框上的平移电机和在所述平移电机驱动下旋转的丝杆,所述滑动臂上安装有用于与所述丝杆配合的螺纹套。
5、作为本实用新型的优选,所述平移驱动装置包含同步轴,所述同步轴的两端通过联轴器和所述丝杆连接,所述同步轴在所述平移电机驱动下旋转。
6、作为本实用新型的优选,所述同步轴连接链轮,所述链轮通过链条与所述平移电机的动力输出端连接。
7、作为本实用新型的优选,所述滑动臂上连接有外表面光滑的滑动片,所述滑动片的光滑面与所述车架抵触。
8、作为本实用新型的优选,所述直线段和所述上扬段之间通过圆弧形的圆弧过渡段连接贯通。
9、作为本实用新型的优选,所述滑动臂和所述夹持臂之间通过转动轴连接,所述转动轴和所述导向套均在竖直方向延伸,所述转动轴和所述导向套在水平方向上的投影不重合。
10、作为本实用新型的优选,所述车架上设有用于检测所述夹持臂是否收拢到位的收回检测器。
11、作为本实用新型的优选,所述车架上设有用于检测汽车轮胎的车轮检测器。
12、作为本实用新型的优选,所述车轮检测器为光学传感器,且离地距离为-8厘米。
13、作为本实用新型的优选,所述车架上设有用于检测两个所述滑动臂之间的间距是否达到预设值的夹紧检测器,所述滑动臂上包含用于与所述夹紧检测器配合的感应片。
14、作为本实用新型的优选,所述夹持臂包含夹持臂架和安装在所述夹持臂架上的滚套组件,所述滚套组件至少为两套,在水平和高度方向上呈阶梯型错开排布,所述夹持臂架包含主架和安装在所述主架上的轴安装板,所述滚套组件包含安装在所述轴安装板上的滚套轴和套设在所述滚套轴上的滚套。
15、作为本实用新型的优选,每套所述滚套组件的所述滚套,均包含多个独立的滚套单体。
16、作为本实用新型的优选,所述轴安装板开设有供所述滚套轴放入取出的豁口。
17、作为本实用新型的优选,所述主架上还安装有轴固定板,所述轴固定板上开设有供所述滚套轴轴向穿过的通孔。
18、作为本实用新型的优选,所述轴安装板与所述轴固定板为多个,间隔排布安装在所述主架上。
19、综上所述,本实用新型具有如下有益效果:
20、1、夹持套件的两个夹持臂的间距灵活可调,适用于不同尺寸的轮胎。
21、2、夹持轮胎的过程中,两个夹持臂是前后靠近轮胎,而不是侧向靠近轮胎,不会对轮胎侧面、尤其是轮毂,产生损伤。
22、3、在整个设备移动、收纳时,夹持臂可收拢,对空间要求低。
23、4、对于车轮的位置、夹紧的程度、收拢的状态都可自动检测,自动化程度高。
24、5、两个夹持臂的动作依靠一个平移电机来实现,同步性强。
25、6、在平移电机驱动滑动臂滑动时,一方面,滑动片与车架抵触,起到导向和承力的作用,从而降低丝杆承受的径向力;另一方面,光滑的平面摩擦系数低,使得滑动臂移动顺畅。
26、7、一方面,由于轮胎和滚套均为弹性材料,相互形变,面面贴合接触,不伤轮胎。另一方面,每个轮胎夹持臂上的滚套组件均为两套以上,且在高度方向上错开,使得汽车在横向移动的过程中,轮胎不易越过夹持臂,移动过程稳定性好。
27、8、所有的轴固定板和轴安装板在面向轮胎的一面,均为内凹圆弧形状设计的内凹弧面。即使部分车辆轮胎由于胎压不足,轮胎与滚套接触后形变触碰到了夹持臂架,也是触碰到内凹弧面这个区域,其圆弧形设计避免轮胎受伤。
28、9、轴固定板和轴安装板的双板间隔设置起到的技术效果是保证了稳定性和容错性的平衡。
29、10、滚套轴被固定,不会在轴向方向移动,从而避免造成滚套单体的脱落。
30、11、滚套轴被固定,避免了滚套轴和夹持臂架这两个刚性部件转动过程造成的磨损和噪音。
技术特征:
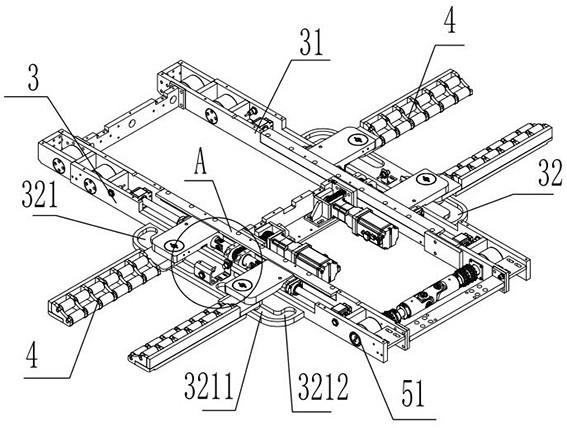
1.一种适用于汽车搬运机器人的轮胎夹持装置,包含车架(3)和用于夹持轮胎的夹持套件(4),其特征在于:所述车架(3)包含主框(31)和安装在所述主框(31)宽度方向两侧的导向板(32),所述导向板(32)上开设有导向槽(321); 所述夹持套件(4)为两套,安装在所述车架(3)宽度方向两侧,每套所述夹持套件(4)包含两个滑动臂(42)和驱动两个所述滑动臂(42)彼此靠近或远离的平移驱动装置(43),每个滑动臂(42)上均转动连接有一个夹持臂(41),所述夹持臂(41)上安装有伸入所述导向槽(321)的导向套(45),所述导向槽(321)包含直线段(3211)和位于所述直线段(3211)两端且向所述车架(3)长度方向中轴线靠近的上扬段(3212)。
2.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述平移驱动装置(43)包含安装在所述主框(31)上的平移电机(431)和在所述平移电机(431)驱动下旋转的丝杆(432),所述滑动臂(42)上安装有用于与所述丝杆(432)配合的螺纹套。
3.根据权利要求2所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述平移驱动装置(43)包含同步轴(436),所述同步轴(436)的两端通过联轴器(433)和所述丝杆(432)连接,所述同步轴(436)在所述平移电机(431)驱动下旋转。
4.根据权利要求3所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述同步轴(436)连接链轮(434),所述链轮(434)通过链条(435)与所述平移电机(431)的动力输出端连接。
5.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述滑动臂(42)上连接有外表面光滑的滑动片(46),所述滑动片(46)的光滑面与所述车架(3)抵触。
6.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述直线段(3211)和所述上扬段(3212)之间通过圆弧形的圆弧过渡段连接贯通。
7.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述滑动臂(42)和所述夹持臂(41)之间通过转动轴(44)连接,所述转动轴(44)和所述导向套(45)均在竖直方向延伸,所述转动轴(44)和所述导向套(45)在水平方向上的投影不重合。
8.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述车架(3)上设有用于检测所述夹持臂(41)是否收拢到位的收回检测器(51)。
9.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述车架(3)上设有用于检测汽车轮胎的车轮检测器(53)。
10.根据权利要求9所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述车轮检测器(53)为光学传感器,且离地距离为5-8厘米。
11.根据权利要求1所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述车架(3)上设有用于检测两个所述滑动臂(42)之间的间距是否达到预设值的夹紧检测器(52),所述滑动臂(42)上包含用于与所述夹紧检测器(52)配合的感应片(421)。
12.根据权利要求1-11任意一项所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述夹持臂(41)包含夹持臂架(1)和安装在所述夹持臂架(1)上的滚套组件(2),所述滚套组件(2)至少为两套,在水平和高度方向上呈阶梯型错开排布,所述夹持臂架(1)包含主架(11)和安装在所述主架(11)上的轴安装板(12),所述滚套组件(2)包含安装在所述轴安装板(12)上的滚套轴(21)和套设在所述滚套轴(21)上的滚套(22)。
13.根据权利要求12所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:每套所述滚套组件(2)的所述滚套(22),均包含多个独立的滚套单体(221)。
14.根据权利要求13所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述轴安装板(12)开设有供所述滚套轴(21)放入取出的豁口(121)。
15.根据权利要求14所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述主架(11)上还安装有轴固定板(13),所述轴固定板(13)上开设有供所述滚套轴(21)轴向穿过的通孔(131)。
16.根据权利要求15所述的一种适用于汽车搬运机器人的轮胎夹持装置,其特征在于:所述轴安装板(12)与所述轴固定板(13)为多个,间隔排布安装在所述主架(11)上。
技术总结
本技术涉及自动化机械设备领域,具体涉及汽车搬运部件设计。本技术是通过以下技术方案得以实现的:一种适用于汽车搬运机器人的轮胎夹持装置,包含车架和用于夹持轮胎的夹持套件,其特征在于:所述车架包含主框和安装在所述主框宽度方向两侧的导向板,所述导向板上开设有导向槽;所述夹持套件为两套,安装在所述车架宽度方向两侧,每套所述夹持套件包含两个滑动臂和驱动两个所述滑动臂彼此靠近或远离的平移驱动装置。本技术的目的是提供一种适用于汽车搬运机器人的轮胎夹持装置,对轮胎的夹持采用旋转夹持的方式,适用于不同尺寸的轮胎,增加通用性,夹持过程中对轮胎不容易产生损失,收纳状态夹持臂收拢,空间利用率高。
技术研发人员:韦亮,初程辉,谢庆波,张彤,李建国,李探宏
受保护的技术使用者:浙江诺力车库设备制造有限公司
技术研发日:20220708
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!