一种两条生产线之间的过渡捡药装置的制作方法
本技术涉及工业设备,尤其涉及一种两条生产线之间的过渡捡药装置。
背景技术:
1、现有技术中,药瓶在泡罩机转移到装盒机之间的过程都采用人工,人工转移过程复杂,效率较低,而且容易出现错误,而导致药瓶在生产过程中损坏。
技术实现思路
1、基于此,针对现有技术中人工转移过程复杂,效率较低,而且容易出现错误,而导致药瓶在生产过程中损坏的问题,有必要提出一种两条生产线之间的过渡捡药装置。
2、本实用新型的技术方案是:
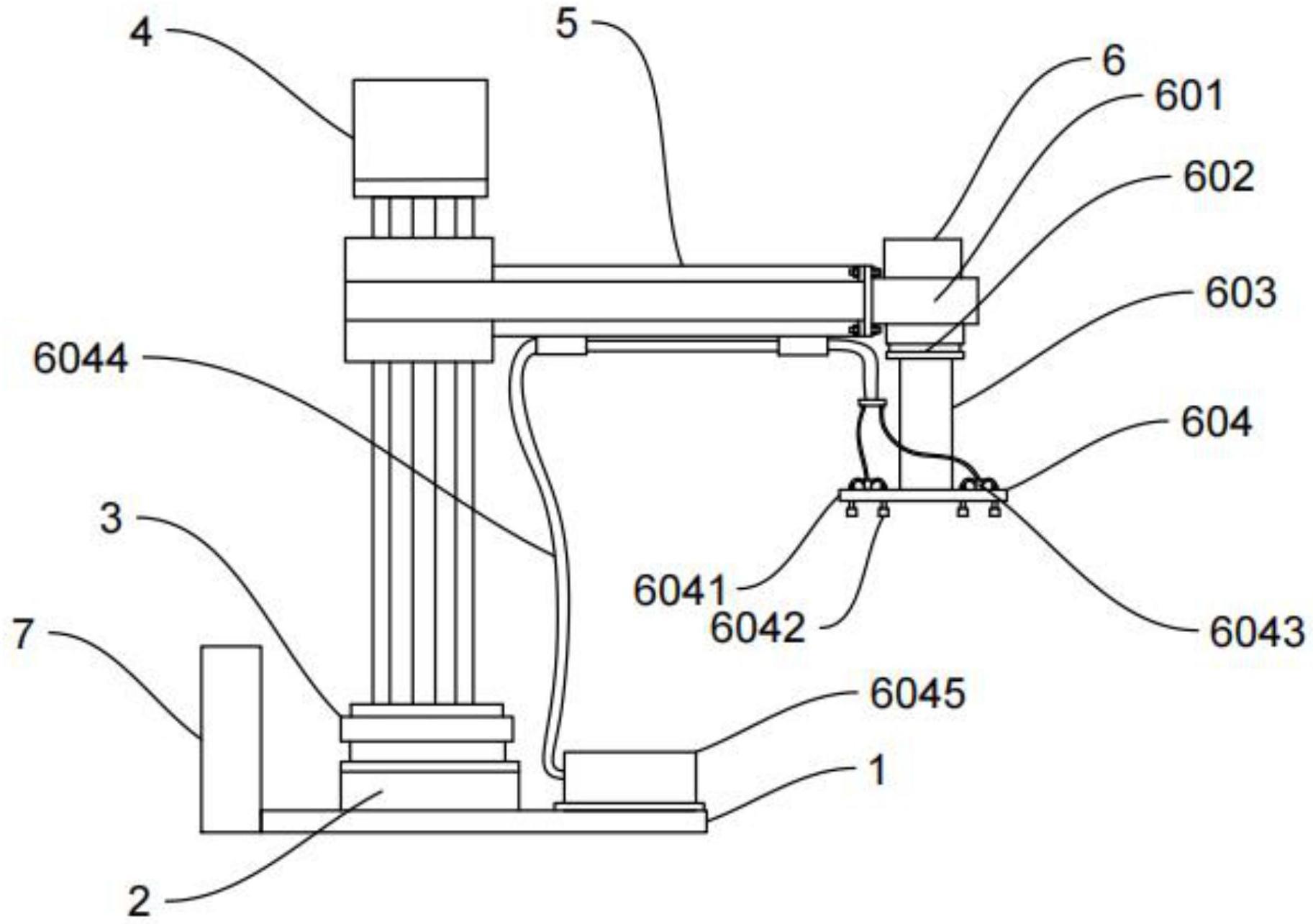
3、一种两条生产线之间的过渡捡药装置,包括底座、旋转基座、转盘机构、滑动支臂、支撑支臂和夹持机构,所述旋转基座设置在所述底座上表面中部,所述转盘机构设置在所述旋转基座上表面中部,且与所述旋转基座配合安装,所述滑动支臂采用电动滑轨,所述滑动支臂竖直设置在所述转盘机构上表面中部,且与所述转盘机构固定连接,所述支撑支臂左端与滑轨的滑动块固定连接;
4、所述夹持机构以可拆卸的方式设置在所述支撑支臂另一端,所述夹持机构包括抓手旋转基座、抓手转盘机构、连接杆和气动吸盘机构,所述抓手旋转基座以可拆卸的方式设置在所述支撑支臂上,所述抓手转盘机构设置在所述抓手旋转基座下表面中部,所述连接杆设置在所述抓手转盘机构下方,所述气动吸盘机构通过所述连接杆与所述转盘机构连接。
5、作为本实用新型优选的是,所述气动吸盘机构包括固定板、多个气动吸嘴、气体分流器、气管和真空泵,所述气动吸嘴均匀设置在所述固定板下表面,且所述气动吸嘴上端均贯穿所述固定板与所述气体分流器通过气管连接,所述气体分流器均通过气管与所述真空泵连接,所述真空泵设置在所述底座上。
6、作为本实用新型优选的是,所述支撑支臂上还设置有用于固定所述气管的固定扣和用于加强所述支撑支臂稳定性的加强板。
7、作为本实用新型优选的是,所述旋转基座内设置有用于驱动所述转盘机构的驱动电机,所述驱动电机上还配合设置有旋转编码器。
8、作为本实用新型优选的是,所述抓手旋转基座内设置有用于驱动所述抓手转盘机构的驱动电机,所述驱动电机上还配合设置有旋转编码器。
9、作为本实用新型优选的是,所述底座上还设置有plc控制器,所述滑动支臂、驱动电机、旋转编码器、真空泵和分流阀均由所述plc控制器控制。
10、本实用新型的有益效果是:
11、1、本实用新型通过将底座、旋转基座、转盘机构、滑动支臂、支撑支臂和夹持机构组合安装,通过各个组件的配合,实现了药品的转移,解决了现有技术中人工转移过程复杂,效率较低,而且容易出现错误,而导致药瓶在生产过程中损坏的问题,有利于提高生产效率,合理利用资源。
12、2、本实用新型通过在气动吸盘机构上设置多个气动吸嘴,将气动吸嘴、分流阀、气管和真空泵配合安装,通过真空泵吸气达到同时固定等多个药瓶的功能,实现了同时转移多个药品的功能,提高了生产的效率。
13、3、本实用新型设置旋转编码器和驱动电机,通过旋转编码器将由驱动电机驱动的过度装置的旋转运动变为可控的电信号,实现了过度装置的旋转运动可控的功能,达到精准控制装置的效果。
14、4、本实用新型设置plc控制器,将滑动支臂、驱动电机、旋转编码器、真空泵和分流阀与plc控制器连接,实现了通过plc控制器精准控制设备工作,解决了在转移过程中设备精确控制的问题。
技术特征:
1.一种两条生产线之间的过渡捡药装置,其特征在于,包括底座、旋转基座、转盘机构、滑动支臂、支撑支臂和夹持机构,所述旋转基座设置在所述底座上表面中部,所述转盘机构设置在所述旋转基座上表面中部,且与所述旋转基座配合安装,所述滑动支臂采用电动滑轨,所述滑动支臂竖直设置在所述转盘机构上表面中部,且与所述转盘机构固定连接,所述支撑支臂左端与滑轨的滑动块固定连接;
2.根据权利要求1所述的一种两条生产线之间的过渡捡药装置,其特征在于,所述气动吸盘机构包括固定板、多个气动吸嘴、气体分流器、气管和真空泵,所述气动吸嘴均匀设置在所述固定板下表面,且所述气动吸嘴上端均贯穿所述固定板分别与所述气体分流器通过气管连接,所述气体分流器均通过气管与所述真空泵连接,所述真空泵设置在所述底座上。
3.根据权利要求2所述的一种两条生产线之间的过渡捡药装置,其特征在于,所述支撑支臂上还设置有用于固定所述气管的固定扣和用于加强所述支撑支臂稳定性的加强板。
4.根据权利要求1所述的一种两条生产线之间的过渡捡药装置,其特征在于,所述旋转基座内设置有用于驱动所述转盘机构的驱动电机,所述驱动电机上还配合设置有旋转编码器。
5.根据权利要求1所述的一种两条生产线之间的过渡捡药装置,其特征在于,所述抓手旋转基座内设置有用于驱动所述抓手转盘机构的驱动电机,所述驱动电机上还配合设置有旋转编码器。
6.根据权利要求1所述的一种两条生产线之间的过渡捡药装置,其特征在于,所述底座上还设置有plc控制器,所述滑动支臂、驱动电机、旋转编码器、真空泵和气体分流器均由所述plc控制器控制。
技术总结
本技术公开了一种两条生产线之间的过渡捡药装置,包括底座、旋转基座、转盘机构、滑动支臂、支撑支臂和夹持机构,旋转基座设置在底座上表面中部,转盘机构设置在旋转基座上表面中部,且与旋转基座配合安装,滑动支臂垂直设置在转盘机构上表面中部,且与转盘机构固定连接,滑动支臂采用电动滑轨,支撑支臂一端与滑轨的滑动块固定连接;夹持机构以可拆卸的方式设置在支撑支臂另一端,夹持机构包括抓手旋转基座、抓手转盘机构、连接杆和气动吸盘机构,本技术解决了现有技术中人工转移过程复杂,效率较低,而且容易出现错误,而导致药瓶在生产过程中损坏的问题。
技术研发人员:史凌洋,蒋达博,罗盛,梁星,谢雷
受保护的技术使用者:成都市海通药业有限公司
技术研发日:20220718
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!