一种多刀切输送机的制作方法
1.本实用新型涉及陶瓷输送设备技术领域,具体涉及一种多刀切输送机。
背景技术:
2.在发泡陶瓷板生产加工完成后,需根据实际所需对发泡陶瓷板进行切割,以分割成所需长度应用于不同部位;随着泡沫陶瓷使用范围的不断扩大,其应用领域也逐渐扩大,由过滤、热工等领域逐渐扩展到隔热、吸音、电子、光电、传感、环境生物及化学领域。
3.现有的多刀切割设备在切割完成后往往是通过人工手动进行收集装箱,不仅人工强度较大,且收集过程中需停止输送设备的运转,以便于人工装箱,输送包装整体效率较低。
技术实现要素:
4.为解决上述问题,本实用新型提出了一种多刀切输送机,包括输送带,输送带上方设置有安装板,安装板的下方等距安装有多个切刀;输送带一边缘端衔接有斜道,斜道的一侧设置有收集部件,收集部件包括称重传感器,称重传感器的下方设置有直线驱动器,称重传感器与直线驱动器电性连接,斜道的侧壁安装有水平设置的光电传感器,光电传感器与直线驱动器电性连接,且光电传感器的感应端处于称重传感器的上方,称重传感器远离滑道的一侧设置有挡座。
5.进一步的,直线驱动器的四周竖直设置有折板,各个折板之间留有缝隙。
6.进一步的,折板的侧壁安装有上胶枪,上胶枪的上胶端通过相邻两个折板的缝隙伸入四个折板围成的空间内。
7.进一步的,一个折板的顶部安装有接触开关,接触开关与上胶枪电性连接。
8.进一步的,直线驱动器和称重传感器之间安装有缓冲弹簧,缓冲弹簧的两端分别与直线驱动器的伸缩端和称重传感器的底部相固定。
9.进一步的,挡座靠近斜道的侧壁固定有缓冲海绵。
10.本实用新型有益效果如下:通过直线驱动器、称重传感器和光电传感器等部件的配合下,使得切割后的陶瓷板可逐渐叠放于包装箱上,以便于输送包装,无需人工将切割完成的陶瓷板进行逐个取物收集,且省去后续包装工序,有效提升输送包装整体效率。
附图说明
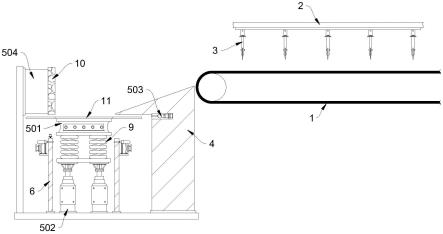
11.图1为本实用新型的内部结构示意图;
12.图2为本实用新型中直线驱动器、光电传感器和接触开关的结构示意图;
13.图3为本实用新型的外部结构示意图。
14.附图标记说明如下:1、输送带;2、安装板;3、切刀;4、斜道;501、称重传感器;502、直线驱动器;503、光电传感器;504、挡座;6、折板;7、上胶枪;8、接触开关;9、缓冲弹簧;10、缓冲海绵;11、包装箱。
具体实施方式
15.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相正对地重要性。
16.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
17.下面结合说明书附图对本实用新型做进一步说明:
18.如图1、图2和图3所示,一种多刀切输送机,包括输送带1,输送带1 上方设置有安装板2,安装板的下方等距安装有多个切刀3;输送带1一边缘端衔接有斜道4,斜道4的一侧设置有收集部件,收集部件包括称重传感器501,称重传感器501的下方设置有直线驱动器502,称重传感器501与直线驱动器 502电性连接,直线驱动器502和称重传感器501之间安装有缓冲弹簧9,缓冲弹簧9的两端分别与直线驱动器502的伸缩端和称重传感器501的底部相固定,斜道4的侧壁安装有水平设置的光电传感器503,光电传感器503与直线驱动器502电性连接,且光电传感器503的感应端处于称重传感器501的上方。
19.本实施例中,直线驱动器502的四周竖直设置有折板6,各个折板6之间留有缝隙折板6的侧壁安装有上胶枪7,上胶枪7的上胶端通过相邻两个折板 6的缝隙伸入四个折板6围成的空间内,一个折板6的顶部安装有接触开关8,接触开关8与上胶枪7电性连接。
20.本实施例中,称重传感器501远离滑道的一侧设置有挡座504,挡座504 靠近斜道4的侧壁固定有缓冲海绵10。
21.本实用新型工作原理如下:
22.通过输送带1对待切割的发泡陶瓷板进行运送,利用多个切刀3对发泡陶瓷板进行等长切割,切割完成的陶瓷板经输送带1继续运送至输送带1边缘,而后经斜道4落至称重传感器501上展开的包装箱11上,陶瓷板与缓冲海绵 10接触,避免其与挡座504直接接触,缓冲弹簧9受力卸压,称重传感器501 感应到其上方的重量变化后,直线驱动器502收缩带动称重传感器501和陶瓷板下行,直至陶瓷板下行至光电传感器503的感光端下方,直线驱动器502 停止收缩,后一陶瓷板继续落至前一陶瓷板上,称重传感器501、直线驱动器 502和光电传感器503再次配合运行,如此循环;随着包装箱11的高度逐渐降低,当包装箱11接触到接触开关8时,上胶枪7开始运作,随着包装箱11 的下行,上胶枪7对包装箱11边缘处进行上胶粘连;无需人工将切割完成的陶瓷板进行逐个取物收集,且省去后续包装工序,有效提升输送包装整体效率。
23.本实用新型中直线驱动器502、称重传感器501和光电传感器503等部件间的控制为现有技术人员所熟知的常见控制手段,在此不加赘述。
24.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本
实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
技术特征:
1.一种多刀切输送机,包括输送带(1),其特征在于:所述输送带(1)上方设置有安装板(2),所述安装板的下方等距安装有多个切刀(3);所述输送带(1)一边缘端衔接有斜道(4),所述斜道(4)的一侧设置有收集部件,所述收集部件包括称重传感器(501),所述称重传感器(501)的下方设置有直线驱动器(502),所述称重传感器(501)与直线驱动器(502)电性连接,所述斜道(4)的侧壁安装有水平设置的光电传感器(503),所述光电传感器(503)与直线驱动器(502)电性连接,且光电传感器(503)的感应端处于所述称重传感器(501)的上方,所述称重传感器(501)远离滑道的一侧设置有挡座(504)。2.根据权利要求1所述的一种多刀切输送机,其特征在于:所述直线驱动器(502)的四周竖直设置有折板(6),各个所述折板(6)之间留有缝隙。3.根据权利要求2所述的一种多刀切输送机,其特征在于:所述折板(6)的侧壁安装有上胶枪(7),所述上胶枪(7)的上胶端通过相邻两个折板(6)的缝隙伸入四个折板(6)围成的空间内。4.根据权利要求3所述的一种多刀切输送机,其特征在于:一个所述折板(6)的顶部安装有接触开关(8),所述接触开关(8)与上胶枪(7)电性连接。5.根据权利要求1所述的一种多刀切输送机,其特征在于:所述直线驱动器(502)和称重传感器(501)之间安装有缓冲弹簧(9),所述缓冲弹簧(9)的两端分别与直线驱动器(502)的伸缩端和称重传感器(501)的底部相固定。6.根据权利要求1所述的一种多刀切输送机,其特征在于:所述挡座(504)靠近所述斜道(4)的侧壁固定有缓冲海绵(10)。
技术总结
本实用新型公开了一种多刀切输送机,包括输送带,输送带上方设置有安装板,安装版的下方等距安装有多个切刀;输送带一边缘端衔接有斜道,斜道的一侧设置有收集部件,收集部件包括称重传感器,称重传感器的下方设置有直线驱动器,称重传感器与直线驱动器电性连接,斜道的侧壁安装有水平设置的光电传感器,光电传感器与直线驱动器电性连接,且光电传感器的感应端处于称重传感器的上方,称重传感器远离滑道的一侧设置有挡座;无需人工将切割完成的陶瓷板进行逐个取物收集,且省去后续包装工序,有效提升输送包装整体效率。效提升输送包装整体效率。效提升输送包装整体效率。
技术研发人员:欧阳治球
受保护的技术使用者:湖南尔旭智造科技有限公司
技术研发日:2022.07.15
技术公布日:2023/1/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1