一种金属罐搬运机械手的制作方法
本技术涉及金属罐,尤其涉及一种金属罐搬运机械手。
背景技术:
1、金属罐就是我们常说的易拉罐,其罐盖和罐身是分开生产,最后才组装在一起。金属罐常用于酒水饮料以及罐头产品的包装储存,制造易拉罐的材料有两种:铝材和马口铁。因为铝材具有较高的回收再使用价值,出于对环境保护的考虑,金属罐开始大量使用铝材。同时铝材可通过回收循环使用,从而降低材料成本。
2、现有的金属罐在进行搬运时往往通过人工通过相关器械辅助进行搬运,此方式增加了工作人员的劳动强度,且人工搬运容易导致固定器械抖动从而使得金属罐脱落,而某些金属罐重量较重,人工搬运时容易因体力不支导致安全事故。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种金属罐搬运机械手,其优点在于能通过固定机构与支撑机构双重作用将金属罐进行固定并对其进行搬运,降低工作人员的劳动强度,且支撑机构对金属罐底部进行支撑,防止金属罐脱落。
2、为了实现上述目的,本实用新型采用了如下技术方案:
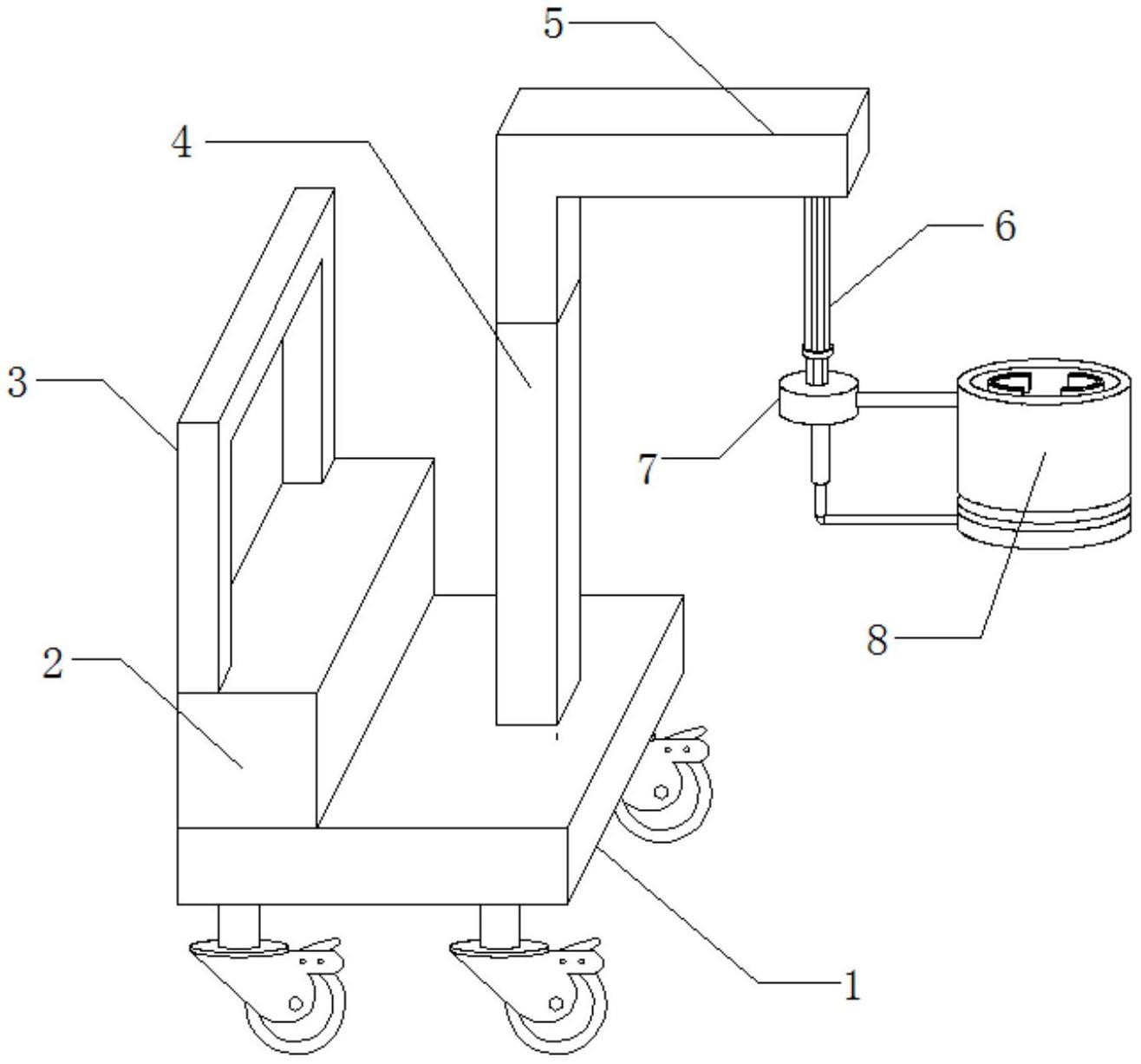
3、一种金属罐搬运机械手,包括底板、固定安装于底板底部外壁四周的万向轮,所述底板顶部外壁焊接有支撑杆,所述支撑杆顶部外壁转动插接有安装架,所述安装架为“l”形,所述安装架底部安装有安装控制机构,所述控制机构内部设置有固定机构,所述固定机构与控制机构相适配,所述控制机构连接有支撑机构,所述支撑机构与控制机构相适配。
4、本实用新型进一步设置为,所述底板顶部外壁一端焊接有配重块,所述配重块顶部焊接有推把,所述推把外壁设置有与其相适配的防护套,所述配重块与支撑杆、安装架、控制机构相适配。
5、本实用新型进一步设置为,所述控制机构包括通过螺栓安装于安装架底部的第一电动伸缩杆、通过螺栓安装于第一电动伸缩杆末端的控制盘、焊接于控制盘一侧外壁的固定筒。
6、本实用新型进一步设置为,所述固定机构包括安装于固定筒内壁两侧的第二电动伸缩杆、焊接于第二电动伸缩杆末端的固定架,所述固定架为弧形,所述固定架与固定筒相适配。
7、本实用新型进一步设置为,所述固定架内壁设置有防滑垫,所述防滑垫为弧形,所述防滑垫尺寸与固定架尺寸相适配。
8、本实用新型进一步设置为,所述支撑机构包括转动安装于控制盘底部外壁的伸缩槽、滑动插接于伸缩槽内壁的支撑盘、开设于控制盘内部的驱动槽、安装于驱动槽内壁的伺服电机,所述伺服电机的输出轴与伸缩槽连接。
9、本实用新型进一步设置为,所述支撑盘顶部外壁设置有防护垫,所述防护垫与支撑盘均与固定筒相适配。
10、本实用新型的有益效果为:
11、1、该种金属罐搬运机械手,需要对金属罐进行搬运时,将装置移动到金属罐处,接着第一电动伸缩杆驱动控制盘下降从而使得固定筒将需要搬运的金属罐套住,再通过固定机构对金属罐进行固定,支撑机构对金属罐进行支撑后再进行搬运,操作简单,使用方便,防止搬运过程中金属罐掉落。
12、2、该种金属罐搬运机械手,当固定筒将金属罐套住后,第二电动伸缩杆驱动固定架移动,使得固定架对金属罐进行加压固定,从而便于固定筒对金属罐进行搬运,操作简单,使用方便,防滑垫增大固定架余金属罐之间的摩擦,使得金属罐更加稳定,不易脱落,同时防滑垫对金属罐进行防护,防止金属罐直接与固定架接触导致金属罐外壁磨损。
13、3、该种金属罐搬运机械手,固定机构对金属罐进行固定后,伺服电机驱动伸缩槽转动使得支撑盘转动至固定筒下方对金属罐进行支撑,防止搬运过程中固定机构松动导致金属罐掉落,金属罐搬运更加安全,可靠性更强,防护垫对金属罐底部进行防护,防止金属罐底部直接与支撑盘接触导致磨损,配重块使得底板上方的重量平均分配,使得装置在搬运金属罐过程中不易侧翻,推把便于推动装置移动,防护套对工作人员手部进行防护。
技术特征:
1.一种金属罐搬运机械手,包括底板(1)、固定安装于底板(1)底部外壁四周的万向轮,其特征在于,所述底板(1)顶部外壁焊接有支撑杆(4),所述支撑杆(4)顶部外壁转动插接有安装架(5),所述安装架(5)为“l”形,所述安装架(5)底部安装有安装控制机构,所述控制机构内部设置有固定机构,所述固定机构与控制机构相适配,所述控制机构连接有支撑机构,所述支撑机构与控制机构相适配。
2.根据权利要求1所述的一种金属罐搬运机械手,其特征在于,所述底板(1)顶部外壁一端焊接有配重块(2),所述配重块(2)顶部焊接有推把(3),所述推把(3)外壁设置有与其相适配的防护套,所述配重块(2)与支撑杆(4)、安装架(5)、控制机构相适配。
3.根据权利要求1所述的一种金属罐搬运机械手,其特征在于,所述控制机构包括通过螺栓安装于安装架(5)底部的第一电动伸缩杆(6)、通过螺栓安装于第一电动伸缩杆(6)末端的控制盘(7)、焊接于控制盘(7)一侧外壁的固定筒(8)。
4.根据权利要求1所述的一种金属罐搬运机械手,其特征在于,所述固定机构包括安装于固定筒(8)内壁两侧的第二电动伸缩杆(9)、焊接于第二电动伸缩杆(9)末端的固定架(10),所述固定架(10)为弧形,所述固定架(10)与固定筒(8)相适配。
5.根据权利要求4所述的一种金属罐搬运机械手,其特征在于,所述固定架(10)内壁设置有防滑垫(11),所述防滑垫(11)为弧形,所述防滑垫(11)尺寸与固定架(10)尺寸相适配。
6.根据权利要求1所述的一种金属罐搬运机械手,其特征在于,所述支撑机构包括转动安装于控制盘(7)底部外壁的伸缩槽(12)、滑动插接于伸缩槽(12)内壁的支撑盘(13)、开设于控制盘(7)内部的驱动槽、安装于驱动槽内壁的伺服电机(14),所述伺服电机(14)的输出轴与伸缩槽(12)连接。
7.根据权利要求6所述的一种金属罐搬运机械手,其特征在于,所述支撑盘(13)顶部外壁设置有防护垫(15),所述防护垫(15)与支撑盘(13)均与固定筒(8)相适配。
技术总结
本技术公开了一种金属罐搬运机械手,涉及金属罐技术领域,包括底板、固定安装于底板底部外壁四周的万向轮,所述底板顶部外壁焊接有支撑杆,所述支撑杆顶部外壁转动插接有安装架,所述安装架为“L”形,所述安装架底部安装有安装控制机构,所述控制机构内部设置有固定机构,所述固定机构与控制机构相适配,所述控制机构连接有支撑机构,所述支撑机构与控制机构相适配。本技术其优点在于能通过固定机构与支撑机构双重作用将金属罐进行固定并对其进行搬运,降低工作人员的劳动强度,且支撑机构对金属罐底部进行支撑,防止金属罐脱落。
技术研发人员:何小龙,金稳,袁彪,韩建平
受保护的技术使用者:东莞市拓海智能装备有限公司
技术研发日:20220801
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!