一种多功能行星限位器的制作方法
1.本实用新型涉及起重机械及电梯技术领域,具体为一种多功能行星限位器。
背景技术:
2.国内起升机构的限位器多用螺旋限位及重锤限位等限位开关形式,他们普遍的问题是:1:由于螺旋限位采用涡轮蜗杆形式,涡轮是速尼龙材质故影响使用寿命;2:重锤限位开关使用细钢丝吊着一个型钢作为起升限位的触碰装置,时间长钢丝绳易于生锈断掉而失去限位的功能;3:安装均不方便易于损坏。
技术实现要素:
3.本实用新型的目的在于提供一种多功能行星限位器,以解决上述背景技术中提出由于螺旋限位采用涡轮蜗杆形式,涡轮是速尼龙材质故影响使用寿命、重锤限位开关使用细钢丝吊着一个型钢作为起升限位的触碰装置,时间长钢丝绳易于生锈断掉而失去限位的功能、安装均不方便易于损坏的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种多功能行星限位器,包括底座、起升机构与运行装置端梁,所述底座的顶端安装有外壳,所述外壳内部的中心位置处安装有行星减速机,所述行星减速机底部的中心位置处设置有拨动轴,所述拨动轴的底端贯穿至底座的外部,所述行星减速机一侧的外壳内部设置有编码器,所述编码器的底端与底座的顶端相连接,所述行星减速机远离编码器一侧的外壳内部设置有限位开关,所述限位开关的底端与底座的顶端相连接。
5.优选的,所述起升机构表面的一侧安装有第二行星限位器本体,通过将第二行星限位器本体设置于起升机构的表面,以便对起升机构进行起升限位处理。
6.优选的,所述起升机构的下方设置有吊钩组,通过将吊钩组设置于起升机构的下方,以便进行起升作业处理。
7.优选的,所述吊钩组的外壁上缠绕有起升钢丝绳,所述起升钢丝绳远离吊钩组的一端延伸至起升机构的内部,通过将起升钢丝绳设置于吊钩组与起升机构之间,以使得起升机构经起升钢丝绳带动吊钩组进行运转。
8.优选的,所述运行装置端梁表面的一侧安装有第三行星限位器本体,通过将第三行星限位器本体设置于运行装置端梁的表面,以便对运行装置端梁的运行机构进行纠偏限位处理。
9.优选的,所述运行装置端梁远离第三行星限位器本体一侧的外壁上安装有运行电机,所述运行电机位置处的运行装置端梁底部设置有车轮组,通过将运行电机与车轮组分别设置于运行装置端梁的外壁与底部,以便运行装置端梁进行驱动运转处理。
10.与现有技术相比,本实用新型的有益效果是:该多功能行星限位器不仅利用行星减速机的大小速比功能,实现起升机构起升高度的精确限位,还能够经内置的编码器实现运行装置端梁运行机构的纠偏,而且达到了易于安装的目的;
11.(1)起升机构的输出轴与第二行星限位器本体的输入轴相互链接,在旋转机构的带动下驱使行星齿轮旋转,行星机构中开关外侧的限位环随之转动,限位环的凸缘转动到设定的极限位置时,凸缘部分即会顶起限位开关触头,使限位开关切断回路电源,从而使旋转机构停止运动,达到起升限位的目的;
12.(2)将第三行星限位器本体安装在运行装置端梁的车轮组输出轴上,第三行星限位器本体内部的编码器通过计算跨度两端车轮的旋转圈数精确计算各自的运行距离超出允许的距离误差,可自动调整运行速度参数以达到跨度两端的运行机构能够同步运行实现纠偏的目的;
13.(3)底座底部的拐角位置处皆设置有销孔,即可借助外部定位销贯穿此销孔并旋入至待安装的平台上,从而达到了易于安装的目的。
附图说明
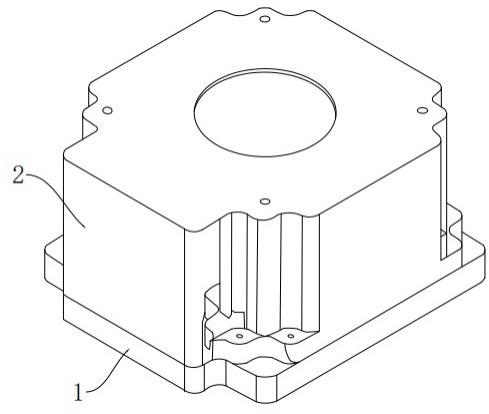
14.图1为本实用新型的三维结构示意图;
15.图2为本实用新型的剖视结构示意图;
16.图3为本实用新型的起升限位结构示意图;
17.图4为本实用新型的纠偏限位结构示意图。
18.图中:1、底座;2、外壳;3、编码器;4、限位开关;5、拨动轴;6、行星减速机;7、第二行星限位器本体;8、起升机构;9、起升钢丝绳;10、吊钩组;11、第三行星限位器本体;12、运行装置端梁;13、运行电机;14、车轮组。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-4,本实用新型提供的一种实施例:一种多功能行星限位器,包括底座1、起升机构8与运行装置端梁12,起升机构8表面的一侧安装有第二行星限位器本体7;
21.使用时,通过将第二行星限位器本体7设置于起升机构8的表面,以便对起升机构8进行起升限位处理;
22.起升机构8的下方设置有吊钩组10;
23.使用时,通过将吊钩组10设置于起升机构8的下方,以便进行起升作业处理;
24.吊钩组10的外壁上缠绕有起升钢丝绳9,起升钢丝绳9远离吊钩组10的一端延伸至起升机构8的内部;
25.使用时,通过将起升钢丝绳9设置于吊钩组10与起升机构8之间,以使得起升机构8经起升钢丝绳9带动吊钩组10进行运转;
26.运行装置端梁12表面的一侧安装有第三行星限位器本体11;
27.使用时,通过将第三行星限位器本体11设置于运行装置端梁12的表面,以便对运行装置端梁12的运行机构进行纠偏限位处理;
28.运行装置端梁12远离第三行星限位器本体11一侧的外壁上安装有运行电机13,运行电机13位置处的运行装置端梁12底部设置有车轮组14;
29.使用时,通过将运行电机13与车轮组14分别设置于运行装置端梁12的外壁与底部,以便运行装置端梁12进行驱动运转处理;
30.底座1的顶端安装有外壳2,外壳2内部的中心位置处安装有行星减速机6,行星减速机6底部的中心位置处设置有拨动轴5,拨动轴5的底端贯穿至底座1的外部;
31.行星减速机6一侧的外壳2内部设置有编码器3,编码器3的底端与底座1的顶端相连接;
32.行星减速机6远离编码器3一侧的外壳2内部设置有限位开关4,限位开关4的底端与底座1的顶端相连接。
33.本申请实施例在使用时,首先通过底座1底部的拐角位置处皆设置有销孔,即可借助外部定位销贯穿此销孔并旋入至待安装的平台上,进而达到了易于安装的目的,另者第二行星限位器本体7以及第三行星限位器本体11的整体结构与底座1的整体结构一致,之后通过将起升机构8的输出轴与第二行星限位器本体7的输入轴相互链接,在旋转机构的带动下驱使行星齿轮旋转,第二行星限位器本体7中开关外侧的限位环随之转动,限位环的凸缘转动到设定的极限位置时,凸缘部分即会顶起限位开关4触头,使限位开关4切断回路电源,即可使旋转机构停止运动并达到起升限位的目的,最后通过将第三行星限位器本体11安装在运行装置端梁12的车轮组14输出轴上,第三行星限位器本体11内部的编码器3通过计算跨度两端车轮的旋转圈数精确计算各自的运行距离超出允许的距离误差,可自动调整运行速度参数以达到跨度两端的运行机构能够同步运行实现纠偏的目的,从而完成该行星限位器的使用。
技术特征:
1.一种多功能行星限位器,其特征在于,包括底座(1)、起升机构(8)与运行装置端梁(12),所述底座(1)的顶端安装有外壳(2),所述外壳(2)内部的中心位置处安装有行星减速机(6),所述行星减速机(6)底部的中心位置处设置有拨动轴(5),所述拨动轴(5)的底端贯穿至底座(1)的外部,所述行星减速机(6)一侧的外壳(2)内部设置有编码器(3),所述编码器(3)的底端与底座(1)的顶端相连接,所述行星减速机(6)远离编码器(3)一侧的外壳(2)内部设置有限位开关(4),所述限位开关(4)的底端与底座(1)的顶端相连接。2.根据权利要求1所述的一种多功能行星限位器,其特征在于:所述起升机构(8)表面的一侧安装有第二行星限位器本体(7)。3.根据权利要求1所述的一种多功能行星限位器,其特征在于:所述起升机构(8)的下方设置有吊钩组(10)。4.根据权利要求3所述的一种多功能行星限位器,其特征在于:所述吊钩组(10)的外壁上缠绕有起升钢丝绳(9),所述起升钢丝绳(9)远离吊钩组(10)的一端延伸至起升机构(8)的内部。5.根据权利要求1所述的一种多功能行星限位器,其特征在于:所述运行装置端梁(12)表面的一侧安装有第三行星限位器本体(11)。6.根据权利要求5所述的一种多功能行星限位器,其特征在于:所述运行装置端梁(12)远离第三行星限位器本体(11)一侧的外壁上安装有运行电机(13),所述运行电机(13)位置处的运行装置端梁(12)底部设置有车轮组(14)。
技术总结
本实用新型公开了一种多功能行星限位器,包括底座、起升机构与运行装置端梁,底座的顶端安装有外壳,外壳内部的中心位置处安装有行星减速机,行星减速机底部的中心位置处设置有拨动轴,拨动轴的底端贯穿至底座的外部,行星减速机一侧的外壳内部设置有编码器,编码器的底端与底座的顶端相连接,行星减速机远离编码器一侧的外壳内部设置有限位开关,限位开关的底端与底座的顶端相连接。本实用新型不仅利用行星减速机的大小速比功能,实现起升机构起升高度的精确限位,还能够经内置的编码器实现运行装置端梁运行机构的纠偏,而且达到了易于安装的目的。装的目的。装的目的。
技术研发人员:王立建 张春丽 武建华 王智军
受保护的技术使用者:河南三智装备科技有限公司
技术研发日:2022.09.13
技术公布日:2022/12/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1