一种扁管收集生产线的制作方法
本技术涉及自动化设备,特别涉及一种扁管收集生产线。
背景技术:
1、目前的扁管收集工序是通过人工收集打包的方式,由人工对扁管进行计数,将足够数量的扁管通过特定的束带进行打包,这种收集扁管的方式速度较慢,每捆扁管的数量也无法得到准确保障,并且无法打包出较为整齐的扁管捆,需要操作工人长时间重复繁复的整理收集扁管工作,消耗了大量的人力和时间。
技术实现思路
1、本实用新型的目的在于提供一种扁管收集生产线,以解决上述背景技术中提出的问题。
2、本实用新型通过以下技术方案实现:
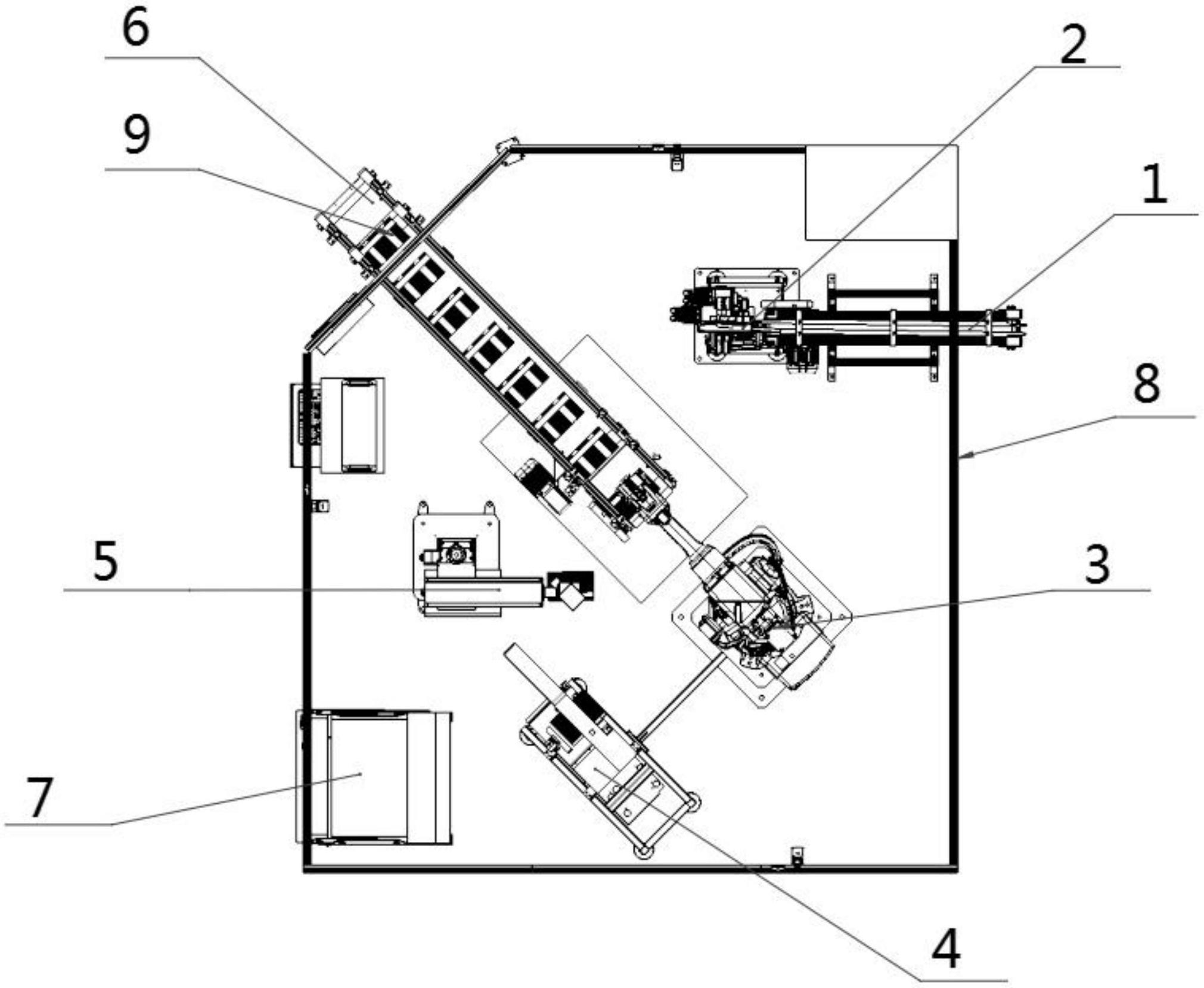
3、一种扁管收集生产线,包括进料通道、收集装置、搬运机器人、束带装置、激光打标装置、运出装置、配电柜和防护网;所述束带装置、激光打标装置、运出装置、收集装置和进料通道依次绕所述搬运机器人呈圆弧形设置,且与所述搬运机器人的间距不超出所述搬运机器人的手臂伸长范围,所述配电柜与所述进料通道、收集装置、搬运机器人、束带装置、激光打标装置、运出装置均电性连接,所述防护网环绕布置在所述进料通道、收集装置、搬运机器人、束带装置、激光打标装置、运出装置、配电柜的外围,所述进料通道的进料端和所述运出装置的出料端均穿透所述防护网,所述进料通道的进料端与制管机的出料通道对接,制管机制造的扁管直接进入所述进料通道,进入所述扁管收集生产线进行收集、打包、打标(通过在束带上激光刻字,进行标记的功能)作业,作业完成后的扁管料捆经所述运出装置运输到所述防护网的外侧。
4、进一步的,所述防护网配备有安全门,所述防护网内还设置有用于感应人体是否进入所述搬运机器人工作区域的自动感应装置,当自动感应装置监测到有人员进入时立即停机,以防止在设备运转时,作业人员误入工作区域造成不必要的伤害。
5、进一步的,所述收集装置内设有对扁管进行计数的光电传感器,解决了人工打包时存在计数误差的问题。
6、进一步的,所述搬运机器人的手臂端部设有气动夹具。
7、与现有技术相比,本实用新型的有益效果是:
8、本实用新型提供了一种满足扁管收集、打包、打标等功能的自动化设备。本实用新型通过将设备的进料通道与制管机的出料通道对接,实现了生产出的扁管直接进入扁管收集区域,经过收集、打包、打标、出料等工作单元实现对扁管的自动收集,减少了人力投入,提高了作业效率,节约了时间,并且使扁管的打包数量更加精准,解决了人工打包时存在计数误差的问题,扁管的打包更加整齐,减少了扁管在打包过程中易损坏的问题,节约了物料和人力资源。
技术特征:
1.一种扁管收集生产线,其特征在于:包括进料通道(1)、收集装置(2)、搬运机器人(3)、束带装置(4)、激光打标装置(5)、运出装置(6)、配电柜(7)和防护网(8);所述束带装置(4)、激光打标装置(5)、运出装置(6)、收集装置(2)和进料通道(1)依次绕所述搬运机器人(3)呈圆弧形设置,且与所述搬运机器人(3)的间距不超出所述搬运机器人(3)的手臂伸长范围,所述配电柜(7)与所述进料通道(1)、收集装置(2)、搬运机器人(3)、束带装置(4)、激光打标装置(5)、运出装置(6)均电性连接,所述防护网(8)环绕布置在所述进料通道(1)、收集装置(2)、搬运机器人(3)、束带装置(4)、激光打标装置(5)、运出装置(6)、配电柜(7)的外围,所述进料通道(1)的进料端和所述运出装置(6)的出料端均穿透所述防护网(8),所述进料通道(1)的进料端与制管机的出料通道对接。
2.根据权利要求1所述的一种扁管收集生产线,其特征在于:所述防护网(8)配备有安全门,所述防护网(8)内还设置有用于感应人体是否进入所述搬运机器人(3)工作区域的自动感应装置。
3.根据权利要求1所述的一种扁管收集生产线,其特征在于:所述收集装置(2)内设有对扁管进行计数的光电传感器。
4.根据权利要求1所述的一种扁管收集生产线,其特征在于:所述搬运机器人(3)的手臂端部设有气动夹具。
技术总结
本技术公开了一种扁管收集生产线,包括进料通道、收集装置、搬运机器人、束带装置、激光打标装置、运出装置、配电柜和防护网;束带装置、激光打标装置、运出装置、收集装置和进料通道依次绕搬运机器人呈圆弧形设置,进料通道的进料端和运出装置的出料端均穿透防护网。本技术通过将设备的进料通道与制管机的出料通道对接,实现了生产出的扁管直接进入扁管收集区域,经过收集、打包、打标、出料等工作单元实现对扁管的自动收集,减少了人力投入,提高了作业效率,节约了时间,并且使扁管的打包数量更加精准,解决了人工打包时存在计数误差的问题,扁管的打包更加整齐,减少了扁管在打包过程中易损坏的问题,节约了物料和人力资源。
技术研发人员:苑浩,任家文,靳杰
受保护的技术使用者:华恒自动化设备(天津)有限公司
技术研发日:20220920
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!