一种多台横移小车同步位移系统的制作方法
本技术涉及底模小车的转运,尤其涉及一种多台横移小车同步位移系统。
背景技术:
1、底模小车将浇筑完毕的预制梁体在一条纵移轨道上移动至指定位置并将梁卸载后,需移至另一条纵移回程轨道工位,此时需多台横移小车在横移轨道上带动底模小车横向移动换轨。现有技术中的换轨方式为:先将底模小车顶升至高于纵移轨道,然后多台横移小车同步合作横向移动进一步带动底模小车横向移动,但现有技术中的横移小车存在如下缺点:
2、1、因横移小车同步性差,一般只能设置两台,因此运载较长梁体的底模小车时会因跨距过大导致底模小车容易产生变形,无法满足较长梁体的底模小车的横移运载;
3、2、横移小车定位精度不高,需要人员进行二次定位调整;
4、3、横移小车需要铺设卷筒线缆供电,可能影响到其他区域的正常作业;
5、4、采用地面安装感应块触发感应的方式对横移小车的位置进行判断,但现场施工可能会造成感应块位置变化、感应块损坏的情况导致横移小车偏移设定位置。
技术实现思路
1、本实用新型要解决的技术问题是克服现有技术的不足,提供一种结构简单,多台横移小车间同步横移性好的多台横移小车同步位移系统。
2、为解决上述技术问题,本实用新型采用以下技术方案:
3、一种多台横移小车同步位移系统,包括同步通讯模块及多台横移小车,所述横移小车上设有伺服电机、行走装置及控制模块,所述控制模块与伺服电机连接,所述伺服电机与行走装置连接并驱动行走装置移动,所述同步通讯模块与多台横移小车的控制模块均连接。
4、作为上述技术方案的进一步改进:
5、所述行走装置包括分别设于横移小车前后两端的主动轮组及从动轮组,所述伺服电机通过传动机构与主动轮组连接。
6、所述主动轮组包括设于横移小车左右两侧的主动轮,两个主动轮通过联轴器连接。
7、所述横移小车上还设有电池,所述电池用于给横移小车供电,所述控制模块与电池连接,并用于监测电池的数据信息。
8、所述横移小车上还设有用于给电池充电的充电插口和/或充电刷板。
9、所述横移小车上还设有限位开关,所述限位开关与控制模块连接。
10、所述横移小车上还设有顶升油缸及用于驱动顶升油缸升降的驱动机构。
11、所述横移小车上还设有位置传感器,所述位置传感器与控制模块连接,所述位置传感器用于定位横移小车并将位置信息传送给控制模块。
12、所述横移小车还上设有摄像头,所述摄像头用于监控横移小车的移动和运载状态。
13、多台横移小车同步位移系统还包括移动终端,所述横移小车和移动终端通过有线或无线网络连接,所述横移小车及移动终端均设有人机交互单元。
14、与现有技术相比,本实用新型的有益效果在于:
15、本实用新型公开的多台横移小车同步位移系统,包括同步通讯模块及多台横移小车,横移小车上设有伺服电机、行走装置及控制模块,伺服电机与行走装置连接,通过伺服电机驱动行走装置移动,通过控制模块与伺服电机连接,伺服电机按照控制模块输出的信息指令精准提供驱动动力进而控制行走装置的前进速度;进一步的,同步通讯模块与多台横移小车的控制模块均连接,即同步通讯模块与多台横移小车的控制模块间互相接收及输出信息,可向各横移小车的控制模块发送同步启停指令,使各横移小车同步协作带动底模小车横移至下一纵向轨道,结构简单,多台横移小车同步横移性好,适用于运载长梁的底模小车的横移,不会因跨距过大导致底模小车变形。
技术特征:
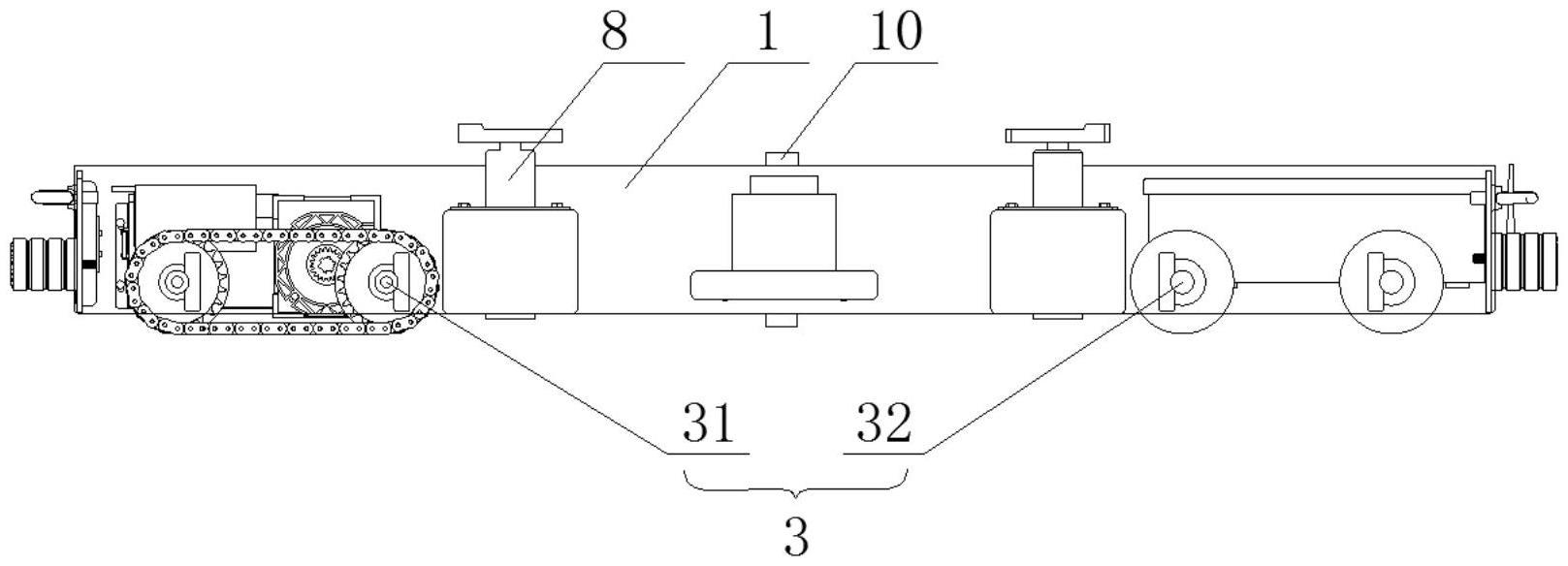
1.一种多台横移小车同步位移系统,其特征在于,包括同步通讯模块及多台横移小车(1),所述横移小车(1)上设有伺服电机(2)、行走装置(3)及控制模块,所述控制模块与伺服电机(2)连接,所述伺服电机(2)与行走装置(3)连接并驱动行走装置(3)移动,所述同步通讯模块与多台横移小车(1)的控制模块均连接。
2.根据权利要求1所述的多台横移小车同步位移系统,其特征在于:所述行走装置(3)包括分别设于横移小车(1)前后两端的主动轮组(31)及从动轮组(32),所述伺服电机(2)通过传动机构(4)与主动轮组(31)连接。
3.根据权利要求2所述的多台横移小车同步位移系统,其特征在于:所述主动轮组(31)包括设于横移小车(1)左右两侧的主动轮(311),两个主动轮(311)通过联轴器(33)连接。
4.根据权利要求1所述的多台横移小车同步位移系统,其特征在于:所述横移小车(1)上还设有电池(5),所述电池(5)用于给横移小车(1)供电,所述控制模块与电池(5)连接,并用于监测电池(5)的数据信息。
5.根据权利要求4所述的多台横移小车同步位移系统,其特征在于:所述横移小车(1)上还设有用于给电池(5)充电的充电插口(61)和/或充电刷板(62)。
6.根据权利要求1至5中任意一项所述的多台横移小车同步位移系统,其特征在于:所述横移小车(1)上还设有限位开关(7),所述限位开关(7)与控制模块连接。
7.根据权利要求1至5中任意一项所述的多台横移小车同步位移系统,其特征在于:所述横移小车(1)上还设有顶升油缸(8)及用于驱动顶升油缸(8)升降的驱动机构。
8.根据权利要求1至5中任意一项所述的多台横移小车同步位移系统,其特征在于:所述横移小车(1)上还设有位置传感器(9),所述位置传感器(9)与控制模块连接,所述位置传感器(9)用于定位横移小车(1)并将位置信息传送给控制模块。
9.根据权利要求1至5中任意一项所述的多台横移小车同步位移系统,其特征在于:所述横移小车(1)还上设有摄像头(10),所述摄像头(10)用于监控横移小车(1)的移动和运载状态。
10.根据权利要求1至5中任意一项所述的多台横移小车同步位移系统,其特征在于:还包括移动终端,所述横移小车(1)和移动终端通过有线或无线网络连接,所述横移小车(1)及移动终端均设有人机交互单元。
技术总结
本技术公开了一种多台横移小车同步位移系统,包括同步通讯模块及多台横移小车,所述横移小车上设有伺服电机、行走装置及控制模块,所述控制模块与伺服电机连接,所述伺服电机与行走装置连接并驱动行走装置移动,所述同步通讯模块与多台横移小车的控制模块均连接。本技术具有结构简单,结构简单,多台横移小车间同步横移性好的优点。
技术研发人员:王薪程,朱凯恒,李骥,杨兴,尹斌
受保护的技术使用者:湖南五新智能科技股份有限公司
技术研发日:20220926
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!