新型粘胶线固化库系统及其转运机械手机构的制作方法
本技术属于自动化粘胶,尤其涉及一种新型粘胶线固化库系统及其转运机械手机构。
背景技术:
1、面向光伏行业的自动化粘胶领域,存在硅棒、粘胶板、晶托粘胶后,在转运和静置固化过程中溢胶滴胶问题,容易污染到静置固化库内的晶棒,且滴落在地面上残胶凝固后也很难以清理,往往要耗费大量人力和时间。
2、在旧型粘胶线固化库系统中,为了防止入库转运过程中产生溢胶滴胶,以及机械手回转过程中产生的飞胶会污染到固化库内的晶棒,需在静置固化料架之间预留机械手横向通过的通道,要占用库内很大的空间。通道的地面和静置固化料架上也需要铺设满地的塑料布料接取滴胶,对库内的卫生和安全都有很大的影响。
技术实现思路
1、为了解决上述从入库取料工位到固化库内静置固化过程溢胶滴胶问题,同时提高静置固化库内的空间利用率,本实用新型提供了一种新型粘胶线固化库系统及其转运机械手,通过采用一系列处理溢胶滴胶措施,从入库取料工位到固化库内静置固化的各个环节解决溢胶滴胶问题,无需给机械手预留横向通过通道,只需保留相对较窄的人工点检清理通道即可,使库内空间得到更好的利用。
2、技术方案如下:
3、一种新型粘胶线固化库系统的转运机械手机构,包括:
4、转运机械手主,其上方安装旋转轴机构;
5、用于在晶托,晶棒,粘胶板三者涂完胶并完成定位后对其搬送接胶的接胶手,其安装在所述转运机械手主体上;
6、所述转运机械手主体包括:
7、机械手底板,其设有驱动气缸和导轨滑块;
8、物料抓手,与所述导轨滑块可滑动连接;
9、所述旋转轴机构包括:
10、伺服电机,通过转轴固定法兰与减速机连接,所属减速机连接安装板。
11、进一步的,所述接胶手包括两组执行组件,两个执行组件结构相同,两个执行组件的底部通过接胶槽连接;每个执行组件包括凸轮槽板;凸轮槽板上设有无杆气缸,无杆气缸连接单滑块导轨安装板,单滑块导轨安装板通过导向机构与凸轮槽板连接实现上下移动;单滑块导轨安装板的一面通过转接板与四滑块导轨安装板一面连接,四滑块导轨安装板的另一面的两端分别设有接胶盒连接板;接胶盒连接板在四滑块导轨安装板上通过导向件左右移动;凸轮槽板上设有用于凸轮随动器移动的凹槽,凸轮随动器一端设置在凸轮槽板内上下左右滑动移动,另一端设置在凸轮随动器连接座上,凸轮随动器连接座安装固定在接胶盒连接板上,接胶盒连接板与接胶槽连接。
12、进一步的,所述接胶槽包括两个接胶盒;两个执行组件中的两个无杆气缸与同一个调速阀连接,调速阀设置在其中一个凸轮槽板上;每个凸轮槽板的上下两端均设有位置传感器。
13、进一步的,导向机构包括滑块和单滑块导轨,导向机构设有两组;单滑块导轨安装在凸轮槽板上;导向件设置四滑块导轨安装板与接胶盒连接板之间,导向件包括四滑块导轨和滑块,四滑块导轨安装在四滑块导轨安装板上,四滑块导轨安装板、和四滑块导轨均为水平设置;凸轮槽板整体为回字形结构,且凸轮槽板上设有两条用于凸轮随动器移动的凹槽。
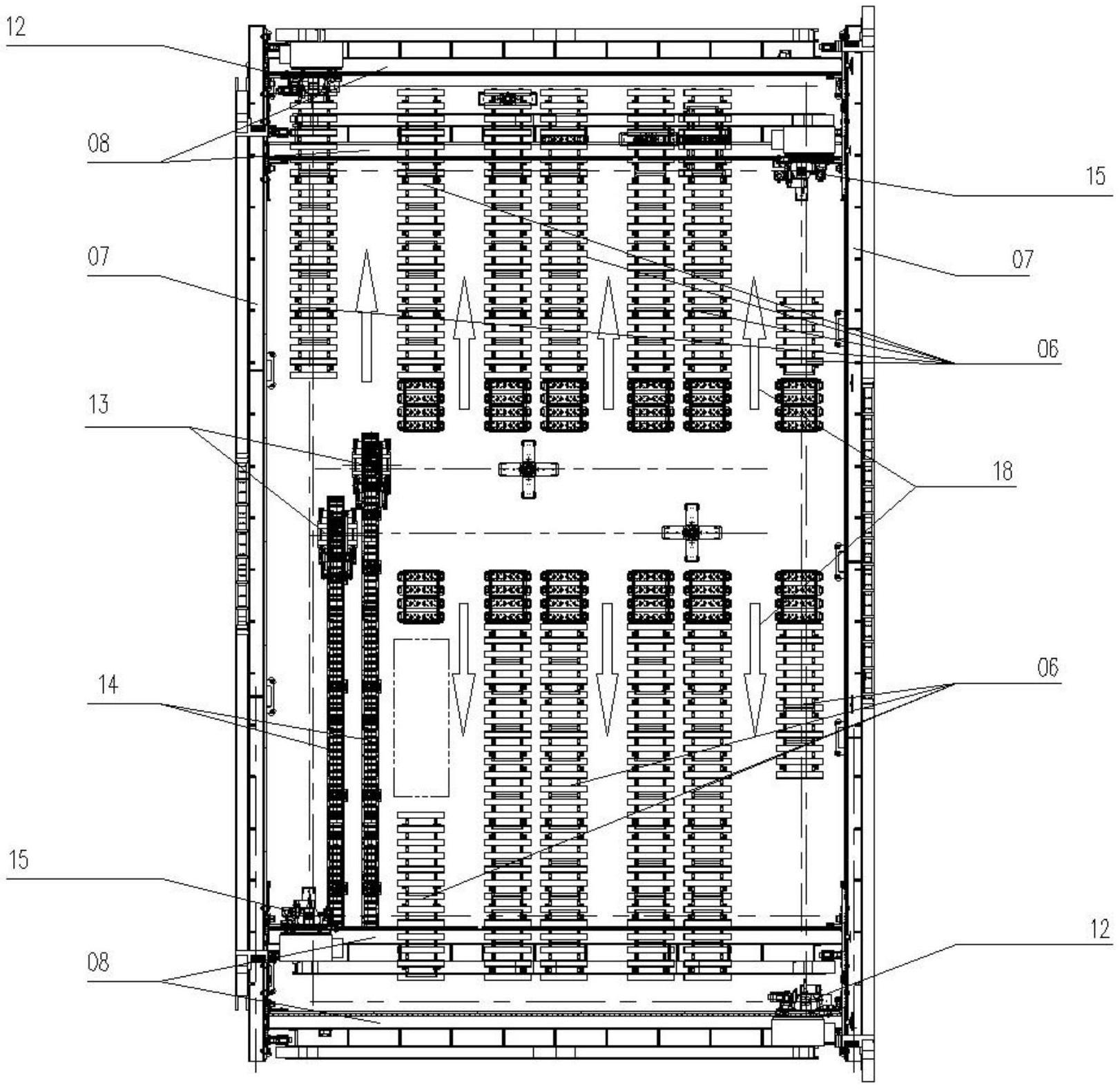
14、本实用新型还包括一种新型粘胶线固化库系统,包括:
15、静置固化库桁架,其上设有上述任一项所述的转运机械手机构;
16、若干静置固化工位、入库取料工位、输送线,三者内置于所述静置固化库桁架中,所述入库取料工位与所述输送线连接;
17、静置固化工位之间设置人工点检通道。
18、进一步的,所述静置固化库桁架包括:
19、桁架x轴,与桁架y轴连接组成桁架主体;
20、桁架z轴,设置在所述桁架x轴和/或桁架y轴上,所述转运机械手机构设置在所述桁架z上;
21、立柱,设置在所述桁架x轴和/或桁架y轴下方;
22、电柜,设置在所述桁架x轴和/或桁架y轴和/或桁架z轴上。
23、进一步的,所述静置固化工位包括:
24、若干方形管连接组成的静置固化料架,所述静置固化料架上方设置晶托垫块;
25、所述晶托垫块静置位置两侧设有接胶槽;所述接胶槽底部设有限位支架;
26、所述静置固化料架下方设有用于调平固定的调节地脚。
27、进一步的,所述转运机械手机构包括两组出库机械手和两组入库机械手,两组出库机械手和两组入库机械手均分别设置在静置固化库桁架斜对角线上的桁架z轴上。
28、本实用新型的有益效果是:
29、本实用新型所述的新型粘胶线固化库系统及其转运机械手机构应用于粘胶自动化后,具有以下优势:
30、1.相同静置固化库面积范围内,可以安装更多数量的静置固化工位;
31、2.能够自动处理取放料过程中的溢胶滴胶问题,节约库内地面残胶的清理工作时间;
32、3.能够有效收集静置固化过程中的溢胶滴胶,便于集中清理,提高工作效率。
技术特征:
1.一种新型粘胶线固化库系统的转运机械手机构,其特征在于,包括:
2.如权利要求1所述的新型粘胶线固化库系统的转运机械手机构,其特征在于,所述接胶手(03)包括两组执行组件,两个执行组件结构相同,两个执行组件的底部通过接胶槽a(313)连接;每个执行组件包括凸轮槽板(312);凸轮槽板(312)上设有无杆气缸(309),无杆气缸(309)连接单滑块导轨安装板(310),单滑块导轨安装板(310)通过导向机构与凸轮槽板(312)连接实现上下移动;单滑块导轨安装板(310)的一面通过转接板(314)与四滑块导轨安装板(302)一面连接,四滑块导轨安装板(302)的另一面的两端分别设有接胶盒连接板(304);接胶盒连接板(304)在四滑块导轨安装板(302)上通过导向件左右移动;凸轮槽板(312)上设有用于凸轮随动器(305)移动的凹槽,凸轮随动器(305)一端设置在凸轮槽板(312)内上下左右滑动移动,另一端设置在凸轮随动器连接座(306)上,凸轮随动器连接座(306)安装固定在接胶盒连接板(304)上,接胶盒连接板(304)与接胶槽a(313)连接。
3.如权利要求2所述的新型粘胶线固化库系统的转运机械手机构,其特征在于,所述接胶槽a(313)包括两个接胶盒;两个执行组件中的两个无杆气缸(309)与同一个调速阀(307)连接,调速阀(307)设置在其中一个凸轮槽板(312)上;每个凸轮槽板(312)的上下两端均设有位置传感器(308)。
4.如权利要求3所述的新型粘胶线固化库系统的转运机械手机构,其特征在于,导向机构包括滑块和单滑块导轨(311),导向机构设有两组;单滑块导轨(311)安装在凸轮槽板(312)上;导向件设置四滑块导轨安装板(302)与接胶盒连接板(304)之间,导向件包括四滑块导轨(303)和滑块,四滑块导轨(303)安装在四滑块导轨安装板(302)上,四滑块导轨安装板(302)、和四滑块导轨(303)均为水平设置;凸轮槽板(312)整体为回字形结构,且凸轮槽板(312)上设有两条用于凸轮随动器(305)移动的凹槽。
5.一种新型粘胶线固化库系统,其特征在于,包括:
6.如权利要求5所述的新型粘胶线固化库系统,其特征在于,所述静置固化库桁架包括:
7.如权利要求5所述的新型粘胶线固化库系统,其特征在于,所述静置固化工位(06)包括:
8.如权利要求5所述的新型粘胶线固化库系统,其特征在于,所述转运机械手机构包括两组出库机械手(12)和两组入库机械手(15),两组出库机械手(12)和两组入库机械手(15)均分别设置在静置固化库桁架斜对角线上的桁架z轴(09)上。
技术总结
新型粘胶线固化库系统及其转运机械手机构,属于自动化粘胶技术领域。技术方案:转运机械手主上方安装旋转轴机构;用于在晶托,晶棒,粘胶板三者涂完胶并完成定位后对其搬送接胶的接胶安装在所述转运机械手主体上;转运机械手主体包括:机械手底板,其设有驱动气缸和导轨滑块;物料抓手,与所述导轨滑块可滑动连接;旋转轴机构包括:伺服电机,通过转轴固定法兰与减速机连接,所属减速机连接安装板。有益效果:本技术在相同静置固化库面积范围内,可以安装更多数量的静置固化工位;能够自动处理取放料过程中的溢胶滴胶问题,节约库内地面残胶的清理工作时间;能够有效收集静置固化过程中的溢胶滴胶,便于集中清理,提高工作效率。
技术研发人员:孙超,鞠修勇,衣振洲,邓洁,沈欢,王朋达,曹春风
受保护的技术使用者:连智(大连)智能科技有限公司
技术研发日:20221024
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!